Das könnte Ihnen auch gefallen
- Machine Tool Acceptance TestsDokument24 SeitenMachine Tool Acceptance TestsakshayNoch keine Bewertungen
- Force MeasurementDokument18 SeitenForce MeasurementKali DasNoch keine Bewertungen
- MILLING LAB EXPERIMENTDokument12 SeitenMILLING LAB EXPERIMENTLuqman HakimNoch keine Bewertungen
- Screw Thread MeasurementDokument55 SeitenScrew Thread MeasurementMadhuNoch keine Bewertungen
- Mechanical Measurement LaboratoryDokument24 SeitenMechanical Measurement LaboratoryMahendra SinghNoch keine Bewertungen
- TURNING LAB EXPERIMENTDokument12 SeitenTURNING LAB EXPERIMENTLuqman HakimNoch keine Bewertungen
- Straightness Flatness Roundness CylindricityDokument7 SeitenStraightness Flatness Roundness CylindricityChristopher Plume De ChineNoch keine Bewertungen
- Profile ProjectorDokument25 SeitenProfile Projectorrummanomar0% (2)
- Production Technology Lab FileDokument45 SeitenProduction Technology Lab FileSakshi RoyNoch keine Bewertungen
- Machine Tool TestingDokument9 SeitenMachine Tool TestingAdhan AliNoch keine Bewertungen
- Auotcollimator - ApplicationDokument34 SeitenAuotcollimator - ApplicationRameshkumar KandaswamyNoch keine Bewertungen
- Tool Makers Microscope PPT - Siddhant SinghDokument15 SeitenTool Makers Microscope PPT - Siddhant SinghSiddhant Singh100% (1)
- BME UNIT II MeasurementDokument55 SeitenBME UNIT II MeasurementVivek Patel100% (1)
- Surface Finish MeasurementDokument45 SeitenSurface Finish MeasurementMuraliNoch keine Bewertungen
- Lathe MachineDokument6 SeitenLathe MachineJuno Eron TalamayanNoch keine Bewertungen
- Introductory Macroeconomics XIIDokument28 SeitenIntroductory Macroeconomics XIISnigdha100% (1)
- Drilling SRM UniviersityDokument27 SeitenDrilling SRM UniviersityBhavin Desai100% (2)
- Experiment Measurement of Lengths, Heights, Diameters, Vernier CaliperDokument11 SeitenExperiment Measurement of Lengths, Heights, Diameters, Vernier Caliperv sharvan kumar asst.prof(mech)Noch keine Bewertungen
- Metrology & Measurement: Anand K Bewoor & Vinay A KulkarniDokument23 SeitenMetrology & Measurement: Anand K Bewoor & Vinay A KulkarniKuwer ThakurNoch keine Bewertungen
- Chapter 9Dokument40 SeitenChapter 9Mukesh KafleNoch keine Bewertungen
- Alignment Test DrillingDokument4 SeitenAlignment Test DrillingVivek Fegade33% (3)
- Surface Roughness TesterDokument8 SeitenSurface Roughness TesterAniketGunjalNoch keine Bewertungen
- Name of The Experiment:: Study and Operation Bench Drilling MachineDokument5 SeitenName of The Experiment:: Study and Operation Bench Drilling MachinemadNoch keine Bewertungen
- Milling CutterDokument11 SeitenMilling CutterRing MasterNoch keine Bewertungen
- Lathe and Capstan & TurretDokument13 SeitenLathe and Capstan & TurretNishit Parmar100% (1)
- BTM2133-Chapter 8 Surface MeasurementDokument46 SeitenBTM2133-Chapter 8 Surface MeasurementAswaja313Noch keine Bewertungen
- Machine Tools: Shaper Machine GuideDokument62 SeitenMachine Tools: Shaper Machine GuideFaisal MaqsoodNoch keine Bewertungen
- Lab ManualDokument19 SeitenLab ManualAjij Mujawar100% (1)
- Lect - Linear and Angular Measurements PDFDokument118 SeitenLect - Linear and Angular Measurements PDFEmmanuel Thomas100% (1)
- Roundness and CircularityDokument16 SeitenRoundness and CircularityKiran MadhavanNoch keine Bewertungen
- Analysis and Modeling of Roundness Error PDFDokument6 SeitenAnalysis and Modeling of Roundness Error PDFCarlosQuelartNoch keine Bewertungen
- Study of Linear Measuring Instruments: Qis College of Engg. & Tech.:Ongole, A.P. Metrology LabDokument9 SeitenStudy of Linear Measuring Instruments: Qis College of Engg. & Tech.:Ongole, A.P. Metrology LabAnand BabuNoch keine Bewertungen
- Manufacturing Processes Measurement GuideDokument25 SeitenManufacturing Processes Measurement GuideyamadaNoch keine Bewertungen
- Roundness Measuring MachineDokument19 SeitenRoundness Measuring MachineArif SanjidNoch keine Bewertungen
- ME250 Straightness Measurement using AutocollimatorDokument10 SeitenME250 Straightness Measurement using AutocollimatorpradabkNoch keine Bewertungen
- Profile ProjectorDokument17 SeitenProfile ProjectorMukeshChoudhry100% (2)
- Metrology and Measurements Lab PDFDokument65 SeitenMetrology and Measurements Lab PDFGopal Krishan Sharma0% (1)
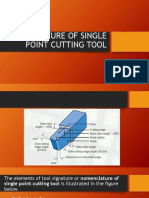
- Tool Signature ElementsDokument11 SeitenTool Signature ElementsMaljon Daren DalanginNoch keine Bewertungen
- Permanent Adjustment of Theodolite: Figure 21.2aDokument4 SeitenPermanent Adjustment of Theodolite: Figure 21.2aahmedNoch keine Bewertungen
- Gauges and Gauge DesignDokument12 SeitenGauges and Gauge DesignAmir JodeyriNoch keine Bewertungen
- Roundness - GD&TDokument23 SeitenRoundness - GD&TKishor kumar Bhatia100% (3)
- Jigs and FixturesDokument26 SeitenJigs and FixturesAumNoch keine Bewertungen
- 1.1 Types of FixturesDokument19 Seiten1.1 Types of FixturesSrinivas DsNoch keine Bewertungen
- Metrology: ME3190 Machine Tools and MetrologyDokument64 SeitenMetrology: ME3190 Machine Tools and MetrologySujit MuleNoch keine Bewertungen
- What Is Milling MachineDokument6 SeitenWhat Is Milling MachineGlenn VergaraNoch keine Bewertungen
- Machining Properties of WoodDokument144 SeitenMachining Properties of WoodManuelContrerasNoch keine Bewertungen
- Drilling Machine Types GuideDokument42 SeitenDrilling Machine Types GuideSomenath RahaNoch keine Bewertungen
- Grinding MachineDokument9 SeitenGrinding Machinejineesha p jNoch keine Bewertungen
- Introduction Metrology Lab ReportDokument2 SeitenIntroduction Metrology Lab ReportMuhamad Hafiz100% (1)
- ComparatorsDokument23 SeitenComparatorsShashwat RaiNoch keine Bewertungen
- Production Drawing & Pracctice Lab ManualDokument23 SeitenProduction Drawing & Pracctice Lab ManualVenkateswar Reddy Mallepally88% (8)
- IndexingDokument10 SeitenIndexingsaddam hosenNoch keine Bewertungen
- The Indexing or Dividing Head For Milling MachineDokument4 SeitenThe Indexing or Dividing Head For Milling MachineDion Adi PutraNoch keine Bewertungen
- Jigs and Fixture Sem III FinalDokument127 SeitenJigs and Fixture Sem III Finalnikhil sidNoch keine Bewertungen
- U2 l11 Permanent Adjustment of TheodoliteDokument5 SeitenU2 l11 Permanent Adjustment of TheodoliteAnjanKrishnaNoch keine Bewertungen
- Lecture Slide Metrology and Inspection - PPT PDFDokument30 SeitenLecture Slide Metrology and Inspection - PPT PDFEdo EdgarNoch keine Bewertungen
- Using Auto Collimator Aim:: FormulaeDokument4 SeitenUsing Auto Collimator Aim:: FormulaejeroldscdNoch keine Bewertungen
- Chapter 8: Geometrical Measurements: Auto CollimatorDokument17 SeitenChapter 8: Geometrical Measurements: Auto CollimatorRaghu KrishnanNoch keine Bewertungen
- AUTOCOLLIMATORDokument6 SeitenAUTOCOLLIMATORAhmed Almujabber100% (1)
- Automobile Engineering-Two MarksDokument15 SeitenAutomobile Engineering-Two MarkssunfaceselvamNoch keine Bewertungen
- Suspension 001Dokument26 SeitenSuspension 001Vincentius NikimNoch keine Bewertungen
- Carburetor Dellorto ManualDokument34 SeitenCarburetor Dellorto ManualKarikalan LoganathanNoch keine Bewertungen
- Understanding Suspensions HendricksonDokument40 SeitenUnderstanding Suspensions HendricksonKarikalan LoganathanNoch keine Bewertungen
- AC Laser Interferometer Measures DisplacementDokument2 SeitenAC Laser Interferometer Measures DisplacementKarikalan LoganathanNoch keine Bewertungen
- Sepuran® N Module 4": in NM /H at 7 Barg 25°CDokument2 SeitenSepuran® N Module 4": in NM /H at 7 Barg 25°CsanjaigNoch keine Bewertungen
- Aminet 110 en PDFDokument17 SeitenAminet 110 en PDFWahid AliNoch keine Bewertungen
- TED BENTON: Is Capitalism Sustainable?Dokument2 SeitenTED BENTON: Is Capitalism Sustainable?api-25932856Noch keine Bewertungen
- Ammonia Tech Manual 2002Dokument28 SeitenAmmonia Tech Manual 2002Talha Bin Zubair0% (1)
- Canadian Wood Council Publications and Tools For Wood Design Robertson RocchiDokument62 SeitenCanadian Wood Council Publications and Tools For Wood Design Robertson RocchiDj MacNoch keine Bewertungen
- Briefing Paper No 4 CV Electrification 30 11 17 PDFDokument5 SeitenBriefing Paper No 4 CV Electrification 30 11 17 PDFAlex WoodrowNoch keine Bewertungen
- Genius+ Ba Cu en 1113Dokument72 SeitenGenius+ Ba Cu en 1113AlbertNoch keine Bewertungen
- Heat Exchanger Design and Drawing FundamentalsDokument11 SeitenHeat Exchanger Design and Drawing Fundamentalsjeevanantham 5846Noch keine Bewertungen
- Management of Septic Shock in An Intermediate Care UnitDokument20 SeitenManagement of Septic Shock in An Intermediate Care UnitJHNoch keine Bewertungen
- Everything You Need to Know About Centrifugal FansDokument65 SeitenEverything You Need to Know About Centrifugal Fansahmed100% (1)
- Shiva Home - DCFDokument2 SeitenShiva Home - DCFshyamsundar_ceNoch keine Bewertungen
- Exogenous Driver Analysis Driver Relative GDP GrowthDokument107 SeitenExogenous Driver Analysis Driver Relative GDP GrowthBhagya FoodsNoch keine Bewertungen
- Operating Systems: Chapter 3: DeadlocksDokument46 SeitenOperating Systems: Chapter 3: DeadlocksManoel Katlib100% (1)
- CSO Skull SeriesDokument2 SeitenCSO Skull SeriesWilchanNoch keine Bewertungen
- Mercy PlansDokument126 SeitenMercy Plansdharry8108Noch keine Bewertungen
- Sdre14-5 Ral 1-2-Rev17Dokument3 SeitenSdre14-5 Ral 1-2-Rev17lwin_oo2435Noch keine Bewertungen
- EBARA FS513CT-R0E pump manualDokument6 SeitenEBARA FS513CT-R0E pump manualApriliyanto Rahadi PradanaNoch keine Bewertungen
- DOCUMENT guides the way with VLB-44 LED Marine BeaconDokument4 SeitenDOCUMENT guides the way with VLB-44 LED Marine BeaconbenNoch keine Bewertungen
- Gas Exchange in Plants and AnimalsDokument7 SeitenGas Exchange in Plants and AnimalsMarvin MelisNoch keine Bewertungen
- Solving Rational Equations and InequalitiesDokument5 SeitenSolving Rational Equations and InequalitiesJaycint - Rud PontingNoch keine Bewertungen
- Bentone LTDokument2 SeitenBentone LTdamiendamNoch keine Bewertungen
- Tyco TY8281 TFP680 - 03 - 2023Dokument17 SeitenTyco TY8281 TFP680 - 03 - 2023First LAstNoch keine Bewertungen
- How To Use Dr. Foster's Essentials: Essential Oils and BlendsDokument5 SeitenHow To Use Dr. Foster's Essentials: Essential Oils and BlendsemanvitoriaNoch keine Bewertungen
- Resultados de La Web: GDDS - Traducción Al Español - Ejemplos Inglés - Reverso ..Dokument3 SeitenResultados de La Web: GDDS - Traducción Al Español - Ejemplos Inglés - Reverso ..Jo PaterninaNoch keine Bewertungen
- 2017 Scoring Materials Math g6Dokument119 Seiten2017 Scoring Materials Math g6KRANoch keine Bewertungen
- Caterpillar 360 KWDokument6 SeitenCaterpillar 360 KWAde WawanNoch keine Bewertungen
- Tribology - Lubricants and LubricationDokument330 SeitenTribology - Lubricants and LubricationJosé Ramírez100% (2)
- Being and Nothingness The Look SartreDokument3 SeitenBeing and Nothingness The Look Sartremaximomore50% (4)
- Matlab For SolidworksDokument18 SeitenMatlab For SolidworksAle' AmoudiNoch keine Bewertungen
- Research PaperDokument13 SeitenResearch PaperHamid ElmyNoch keine Bewertungen