Das könnte Ihnen auch gefallen
- Modeling and Analysis of Doubly Fed Induction Generator Wind Energy SystemsVon EverandModeling and Analysis of Doubly Fed Induction Generator Wind Energy SystemsNoch keine Bewertungen
- Improved Indirect Power Control (IDPC) of Wind Energy Conversion Systems (WECS)Von EverandImproved Indirect Power Control (IDPC) of Wind Energy Conversion Systems (WECS)Noch keine Bewertungen
- Synchronous MotorsDokument27 SeitenSynchronous MotorsSyed Muhammad Munavvar Hussain50% (2)
- Synchronous Motor Working Principle ExplainedDokument6 SeitenSynchronous Motor Working Principle ExplainedHemraj Singh RautelaNoch keine Bewertungen
- Synchronous Generator: Laboratory ExperimentDokument13 SeitenSynchronous Generator: Laboratory ExperimentRajith GamageNoch keine Bewertungen
- Syncgronous Generator UpdatedDokument78 SeitenSyncgronous Generator UpdatedarsalNoch keine Bewertungen
- Principle of Operation of Synchronous Generator - Saravanan T YDokument21 SeitenPrinciple of Operation of Synchronous Generator - Saravanan T YStephanie Pena100% (5)
- Synchronous Motors SlidesDokument55 SeitenSynchronous Motors SlidesKaye Freyssinet Nermal Abanggan100% (1)
- Armature WindingDokument17 SeitenArmature Windingvasu_koneti5124Noch keine Bewertungen
- AlternatorDokument24 SeitenAlternatorJoseEduardoSantaCruzNoch keine Bewertungen
- Synchronous MotorDokument21 SeitenSynchronous MotorAlaine Jan de TablanNoch keine Bewertungen
- Power Output V V Voltage Phase The ADokument14 SeitenPower Output V V Voltage Phase The AJoshua MeraNoch keine Bewertungen
- EE 442 642 IntroductionDokument14 SeitenEE 442 642 IntroductionUSERNAME12340987Noch keine Bewertungen
- Three Phase Synchronous Machines - 2015Dokument93 SeitenThree Phase Synchronous Machines - 2015आश्विन मरहट्टाNoch keine Bewertungen
- Single Phase Induction MotorDokument5 SeitenSingle Phase Induction MotorSridhar SridharNoch keine Bewertungen
- Ch5 Synchronous MachineDokument106 SeitenCh5 Synchronous MachineVeli GörgülüNoch keine Bewertungen
- Induction Motor PPT Part1Dokument20 SeitenInduction Motor PPT Part1debipraasad100% (2)
- Chapter 6 - Synchronous Motors PDFDokument23 SeitenChapter 6 - Synchronous Motors PDFYousab CreatorNoch keine Bewertungen
- Selection of Power Rating of MotorDokument6 SeitenSelection of Power Rating of MotorSEC ExamcellNoch keine Bewertungen
- Difference Between Synchronous and Asynchronous MotorDokument2 SeitenDifference Between Synchronous and Asynchronous MotorIsaac Mangochi100% (1)
- Unit 3Dokument5 SeitenUnit 3Narasimman DonNoch keine Bewertungen
- Synchronous MotorsDokument25 SeitenSynchronous MotorsParvesh NainNoch keine Bewertungen
- E M II: Synchronous MachineDokument10 SeitenE M II: Synchronous MachineAkashman ShakyaNoch keine Bewertungen
- Introduction To DC GeneratorDokument119 SeitenIntroduction To DC GeneratorFaraz HussainNoch keine Bewertungen
- AC Machines Lecture NotesDokument48 SeitenAC Machines Lecture Notessenthilkumar100% (4)
- Hysteresis MotorDokument14 SeitenHysteresis Motorcamming soon100% (1)
- Power System Stability - Unit 4 PSOCDokument57 SeitenPower System Stability - Unit 4 PSOChareesh.makesuNoch keine Bewertungen
- Tutorial EDDokument10 SeitenTutorial EDPavan KhetrapalNoch keine Bewertungen
- Unit2 MachinesDokument35 SeitenUnit2 MachinesdineshkumarNoch keine Bewertungen
- Synchronous Machine DesignDokument35 SeitenSynchronous Machine DesignvietnhuNoch keine Bewertungen
- Special Electrical Machines Ee2403 PDFDokument16 SeitenSpecial Electrical Machines Ee2403 PDFsamyramu100% (3)
- Speed Control of 3-Phase IMDokument19 SeitenSpeed Control of 3-Phase IMpramana_gmritNoch keine Bewertungen
- No Load and Blocked Rotor TestDokument19 SeitenNo Load and Blocked Rotor Testsupere100% (4)
- Excitation System of Alternator IJERTV2IS2515Dokument6 SeitenExcitation System of Alternator IJERTV2IS2515MangeshRudrawar100% (1)
- Synchronous GeneratorsDokument17 SeitenSynchronous GeneratorsAman AnsariNoch keine Bewertungen
- Synchronous GeneratorDokument28 SeitenSynchronous GeneratormohammedNoch keine Bewertungen
- DC GeneratorDokument11 SeitenDC GeneratorTaha khan100% (1)
- Lecture 07 - Synchronous MachinesDokument98 SeitenLecture 07 - Synchronous MachinesbrunichNoch keine Bewertungen
- Chapter4-Synchronous MachinesDokument55 SeitenChapter4-Synchronous MachinesDuydo Bui100% (2)
- Lecture 7 Three-Phase TransformersDokument4 SeitenLecture 7 Three-Phase TransformersShahrim MohdNoch keine Bewertungen
- Automatic Generation Control (AGC) or Automatic Load Frequency Control (ALFC)Dokument36 SeitenAutomatic Generation Control (AGC) or Automatic Load Frequency Control (ALFC)mohan krishna100% (1)
- Single Phase Induction MotorDokument32 SeitenSingle Phase Induction MotorDeep PatelNoch keine Bewertungen
- Synchronous GeneratorDokument86 SeitenSynchronous GeneratorAnonymous 9kzuGaY100% (1)
- Three Phase Synchronous MachinesDokument45 SeitenThree Phase Synchronous MachinesAndrew Lapthorn100% (3)
- PCEG 403 Lab No. 1 Title: Simulation of Single Phase Half Wave Converter DC DriveDokument5 SeitenPCEG 403 Lab No. 1 Title: Simulation of Single Phase Half Wave Converter DC DriveJanup PokharelNoch keine Bewertungen
- Synchronous Machines-Part 0Dokument49 SeitenSynchronous Machines-Part 0An00pgadzillaNoch keine Bewertungen
- VFD Types: Igbts ThyristorsDokument8 SeitenVFD Types: Igbts ThyristorsAshok MoreNoch keine Bewertungen
- Parallel Operation of Synchronous GeneratorsDokument3 SeitenParallel Operation of Synchronous GeneratorsGopal Prasanna100% (1)
- Chapter 3 Synchronous GeneratorDokument21 SeitenChapter 3 Synchronous Generatorahmad abufaresNoch keine Bewertungen
- Induction Motor Lab ManualDokument11 SeitenInduction Motor Lab ManualRabah ZaimeddineNoch keine Bewertungen
- Induction Motor BrakingDokument26 SeitenInduction Motor BrakingAshwini Singh100% (3)
- Chap1 Special MachinesDokument23 SeitenChap1 Special MachinesHell Maax100% (2)
- DC Machine Design Problem With SolutionDokument36 SeitenDC Machine Design Problem With Solutionlvb123Noch keine Bewertungen
- Induction Motor Electric BrakingDokument12 SeitenInduction Motor Electric Brakingmastanamma.Y100% (1)
- Resistor Control of Wound Rotor MotorsDokument11 SeitenResistor Control of Wound Rotor MotorsAndré LuizNoch keine Bewertungen
- Lecture 6 - Induction MotorsDokument34 SeitenLecture 6 - Induction Motorsswamy_satya20004521Noch keine Bewertungen
- Synchronous Generator TestsDokument22 SeitenSynchronous Generator TestsReza Pratama Nugraha0% (1)
- Fina - Ut-5 SSDDokument71 SeitenFina - Ut-5 SSDPrabhu KpNoch keine Bewertungen
- Synchronous MotorDokument26 SeitenSynchronous MotorSyed Muhammad Munavvar HussainNoch keine Bewertungen
- Measuring InstrumentsDokument24 SeitenMeasuring InstrumentsvnyshreyasNoch keine Bewertungen
- VTU Guide Measures Resistance Using Wheatstone BridgeDokument18 SeitenVTU Guide Measures Resistance Using Wheatstone Bridgevnyshreyas100% (2)
- Y Axb Yax BXC: BX B y Ae AxDokument83 SeitenY Axb Yax BXC: BX B y Ae AxSivapriyan RajendranNoch keine Bewertungen
- Electrical EngineeringDokument2 SeitenElectrical EngineeringvnyshreyasNoch keine Bewertungen
- Introduction To Industrial DrivesDokument70 SeitenIntroduction To Industrial Drivesvnyshreyas100% (4)
- Industrial Drives Applications 06EE74Dokument41 SeitenIndustrial Drives Applications 06EE74vnyshreyasNoch keine Bewertungen
- Industrial DrivesDokument10 SeitenIndustrial DrivesvnyshreyasNoch keine Bewertungen
- AbstractDokument48 SeitenAbstractvnyshreyasNoch keine Bewertungen
- Visvesvaraya Technological University 1Dokument7 SeitenVisvesvaraya Technological University 1vnyshreyasNoch keine Bewertungen
- Magesh ReportDokument25 SeitenMagesh ReportvnyshreyasNoch keine Bewertungen
- Biomass PresentationDokument18 SeitenBiomass PresentationvnyshreyasNoch keine Bewertungen
- MageshDokument20 SeitenMageshvnyshreyasNoch keine Bewertungen
- Vinay Shreyas K.V.: Lecturer, Department of Electrical and Electronics H.K.B.K. College of EngineeringDokument32 SeitenVinay Shreyas K.V.: Lecturer, Department of Electrical and Electronics H.K.B.K. College of EngineeringvnyshreyasNoch keine Bewertungen
- Thermal Energy HarvestingDokument21 SeitenThermal Energy HarvestingvnyshreyasNoch keine Bewertungen
- Design of A Seamless Gateway For Mechatrolink : Abstract-Recently, The Real-Time Ethernet Based Protocol HasDokument6 SeitenDesign of A Seamless Gateway For Mechatrolink : Abstract-Recently, The Real-Time Ethernet Based Protocol Hasvinhpo51290Noch keine Bewertungen
- Gate 2014 Syllabus For Instrumentation Engineering inDokument6 SeitenGate 2014 Syllabus For Instrumentation Engineering inrahulchangderNoch keine Bewertungen
- s66698 138URecPrtrDokument36 Seitens66698 138URecPrtrPeter SamuelNoch keine Bewertungen
- VSC Course Lecture2Dokument27 SeitenVSC Course Lecture2eng7senNoch keine Bewertungen
- GUI Based Control System Analysis Using PID Controller For EducationDokument11 SeitenGUI Based Control System Analysis Using PID Controller For Educationpascal toguNoch keine Bewertungen
- Computer Networks Lecture - 2-: Dr. Abbas A. AbdulazeezDokument25 SeitenComputer Networks Lecture - 2-: Dr. Abbas A. AbdulazeezDimitris TheodoropoulosNoch keine Bewertungen
- Tutorial 3 VFD Motor AdvancedDokument20 SeitenTutorial 3 VFD Motor AdvancedTrần Nguyên KhảiNoch keine Bewertungen
- PLL 2164Dokument24 SeitenPLL 2164Benjamín Varela UmbralNoch keine Bewertungen
- Power Link BudgetDokument6 SeitenPower Link BudgetAditya FebriawanNoch keine Bewertungen
- CEPT Novice 1Dokument26 SeitenCEPT Novice 1Ster RncNoch keine Bewertungen
- Lightning Arrester Modeling Using Atp-Emtp: Trin Saengsuwan and Wichet ThipprasertDokument4 SeitenLightning Arrester Modeling Using Atp-Emtp: Trin Saengsuwan and Wichet ThipprasertgumilarNoch keine Bewertungen
- Foundry Technologies 180-Nm Cmos, RF Cmos and Sige Bicmos: High-Performance Devices For A Wide Range of ApplicationsDokument4 SeitenFoundry Technologies 180-Nm Cmos, RF Cmos and Sige Bicmos: High-Performance Devices For A Wide Range of Applicationssandeep_sggsNoch keine Bewertungen
- Home Power Magazine - Wind Power BasicsDokument9 SeitenHome Power Magazine - Wind Power BasicsradurusNoch keine Bewertungen
- Battery DesulfatorsDokument4 SeitenBattery DesulfatorsAlex MaianoNoch keine Bewertungen
- Infineon Bts6133d Ds v01 00 enDokument17 SeitenInfineon Bts6133d Ds v01 00 enmarino246Noch keine Bewertungen
- Roubik Gregorian-Introduction To CMOS OP-AMPs and Comparators-Wiley (1999)Dokument369 SeitenRoubik Gregorian-Introduction To CMOS OP-AMPs and Comparators-Wiley (1999)Maanas Khurana50% (2)
- Lecture5 Chapter2 - Positive and Negative LogicDokument11 SeitenLecture5 Chapter2 - Positive and Negative LogicAyesha HussainNoch keine Bewertungen
- Tsgenco-Exam Syllabus PDFDokument9 SeitenTsgenco-Exam Syllabus PDForaclerca1Noch keine Bewertungen
- 2 Hardware enDokument676 Seiten2 Hardware enNoor Cano100% (1)
- Yellampalli S. Wireless Sensor Networks - Design, Deployment..2021Dokument314 SeitenYellampalli S. Wireless Sensor Networks - Design, Deployment..2021Myster SceneNoch keine Bewertungen
- SRP-6MA (-HV) : Key FeaturesDokument2 SeitenSRP-6MA (-HV) : Key FeaturesNanangDatadikJatimNoch keine Bewertungen
- FYP Project 2jkmkDokument24 SeitenFYP Project 2jkmkMarjanNoch keine Bewertungen
- Satellite Communication Question PaperDokument2 SeitenSatellite Communication Question PaperallanjwilsonNoch keine Bewertungen
- Short Type Questions of Three Phase Induction Motor - 01.04.2020Dokument5 SeitenShort Type Questions of Three Phase Induction Motor - 01.04.2020Amit DebnathNoch keine Bewertungen
- Small Wind Energy Systems 110702042021 Small Wind GuideDokument25 SeitenSmall Wind Energy Systems 110702042021 Small Wind GuideAsad IqbalNoch keine Bewertungen
- Manual CL-3022WKDokument11 SeitenManual CL-3022WKDario ZainNoch keine Bewertungen
- Hydraulic Excavator PC200-8 PC200LC-8 PC220-8 PC220LC-8: 90 Diagrams and DrawingsDokument5 SeitenHydraulic Excavator PC200-8 PC200LC-8 PC220-8 PC220LC-8: 90 Diagrams and Drawingsari100% (3)
- VHF FM Handheld Transceiver: 144 MHZ, Ultra-Rugged, 5 Watts!Dokument2 SeitenVHF FM Handheld Transceiver: 144 MHZ, Ultra-Rugged, 5 Watts!Jc Sevillano AlejandroNoch keine Bewertungen
- Vtac Samsung Catalogue PDFDokument92 SeitenVtac Samsung Catalogue PDFEduardo Mesa PérezNoch keine Bewertungen
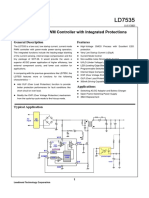
- Green-Mode PWM Controller With Integrated Protections: General Description FeaturesDokument18 SeitenGreen-Mode PWM Controller With Integrated Protections: General Description FeaturesRUSLANNoch keine Bewertungen