Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- CP Plus DVR User's Manual V1.03Dokument185 SeitenCP Plus DVR User's Manual V1.03Tissara Nalin79% (19)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Automatic Flight Control System Analysis Boeing and Airbus ProjectDokument89 SeitenAutomatic Flight Control System Analysis Boeing and Airbus ProjectTissara Nalin100% (3)
- Aerofoil Assignment PDFDokument24 SeitenAerofoil Assignment PDFTissara Nalin100% (1)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Aerofoil Assignment PDFDokument24 SeitenAerofoil Assignment PDFTissara Nalin100% (1)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- IMA97Dokument252 SeitenIMA97Tissara NalinNoch keine Bewertungen
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Kms9 An Userguide enDokument89 SeitenKms9 An Userguide enskshkhanNoch keine Bewertungen
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- AERO FuelConsSeriesDokument19 SeitenAERO FuelConsSeriespedro00001Noch keine Bewertungen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Cockpit Automation Flight DeckDokument13 SeitenCockpit Automation Flight DeckTissara Nalin50% (2)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Glare CompositeDokument10 SeitenGlare Compositewsjouri2510Noch keine Bewertungen
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- Auto PricelistDokument21 SeitenAuto Pricelistecho2arellano100% (1)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Super Koala PDFDokument1 SeiteSuper Koala PDFEzequiel MesquitaNoch keine Bewertungen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Tuason Racing School: An Exemplary Tradition of RacingDokument2 SeitenTuason Racing School: An Exemplary Tradition of RacingMary FelisminoNoch keine Bewertungen
- Mahle Air Filter (Primary) For Tata - HitachiDokument9 SeitenMahle Air Filter (Primary) For Tata - HitachiSurajPandeyNoch keine Bewertungen
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- Kioti Daedong DK751 (C), DK901 (C), DK753 (C), DK903 (C) Tractors Service ManualDokument19 SeitenKioti Daedong DK751 (C), DK901 (C), DK753 (C), DK903 (C) Tractors Service ManualLisakolyNoch keine Bewertungen
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- MN CDLDokument196 SeitenMN CDLRaymond ButterfieldNoch keine Bewertungen
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- 3600 Marine Engine Application and Installation Guide: Ancillary EquipmentDokument17 Seiten3600 Marine Engine Application and Installation Guide: Ancillary EquipmentargodumilahNoch keine Bewertungen
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- ANALYSIS-79-Light & Medium Duty State Wise Truck Market Analysis With Kerala Case Study - ACG PDFDokument29 SeitenANALYSIS-79-Light & Medium Duty State Wise Truck Market Analysis With Kerala Case Study - ACG PDFVivek SinghalNoch keine Bewertungen
- Eurosun Piston Catalog 2020-8Dokument111 SeitenEurosun Piston Catalog 2020-8chandeepa sms100% (1)
- ADokument62 SeitenAMuriel RembertoNoch keine Bewertungen
- Turbine Pilot: Used Turbine Review: The Merlin IiisDokument24 SeitenTurbine Pilot: Used Turbine Review: The Merlin IiisJose LaraNoch keine Bewertungen
- Equity Note - Aftab Automobiles Limited - March 2017Dokument2 SeitenEquity Note - Aftab Automobiles Limited - March 2017Sarwar IqbalNoch keine Bewertungen
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Jeep Grand Cherokee WJ Electrical Wiring DiagramDokument576 SeitenJeep Grand Cherokee WJ Electrical Wiring Diagramdascalumihaipuiu85% (97)
- Mitsubishi Pajero Parts Catalog PDFDokument2 SeitenMitsubishi Pajero Parts Catalog PDFEghie RahardiNoch keine Bewertungen
- Engine, Replacement D11H, D13H, D16H VN VHD VAHDokument66 SeitenEngine, Replacement D11H, D13H, D16H VN VHD VAHhtayooNoch keine Bewertungen
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- PART CATALOGUE LS R36iDokument315 SeitenPART CATALOGUE LS R36ibla blaNoch keine Bewertungen
- AL4 TransmissionDokument59 SeitenAL4 Transmissionericsolver97% (62)
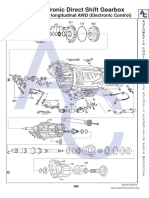
- Audi Ob5 Twin Clutch 7 Speed GearboxDokument4 SeitenAudi Ob5 Twin Clutch 7 Speed GearboxSebastian Celis100% (1)
- Form 1.1 Self-Assessment Checklist: INSTRUCTIONS: This Self-Check Instrument Will Give The Trainer NecessaryDokument4 SeitenForm 1.1 Self-Assessment Checklist: INSTRUCTIONS: This Self-Check Instrument Will Give The Trainer NecessaryJay ReposoNoch keine Bewertungen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (120)
- Kubota RTV-X900 - RTV-X1120D Utility Vehicle Operators ManualDokument114 SeitenKubota RTV-X900 - RTV-X1120D Utility Vehicle Operators ManualСвятославNoch keine Bewertungen
- PC120-6 PC120LC-6: With Tier 2 SAA4D102E-2 EngineDokument12 SeitenPC120-6 PC120LC-6: With Tier 2 SAA4D102E-2 EngineJohn MkCito KINoch keine Bewertungen
- Carnation MainDokument11 SeitenCarnation MainDipak Ranjan SwainNoch keine Bewertungen
- Evinrude Product Information GuideDokument172 SeitenEvinrude Product Information GuideJakson HoleNoch keine Bewertungen
- BMW 320dDokument1 SeiteBMW 320dXDXDXDXDNoch keine Bewertungen
- Catalog GATELOCK PDFDokument7 SeitenCatalog GATELOCK PDFCico LisadonNoch keine Bewertungen
- G1-2. Specification - Indd PDFDokument7 SeitenG1-2. Specification - Indd PDFAlex MorsNoch keine Bewertungen
- Índice de Los Códigos de Los Componentes (2005)Dokument3 SeitenÍndice de Los Códigos de Los Componentes (2005)alexNoch keine Bewertungen
- Recovery PDFDokument164 SeitenRecovery PDFAzizi AbdullahNoch keine Bewertungen
- The Car Design BookDokument9 SeitenThe Car Design BookRajanikantJadhav100% (2)
- JRD Ratan Tata HJDokument9 SeitenJRD Ratan Tata HJJaskiran BhogalNoch keine Bewertungen
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)