Das könnte Ihnen auch gefallen
- Cinemática y CinéticaDokument8 SeitenCinemática y CinéticaYerannys Guiñan de Valenzuela0% (1)
- TMM UTP Clase 1 2 3Dokument55 SeitenTMM UTP Clase 1 2 3Steven Vilchez AyalaNoch keine Bewertungen
- Mecanismos 1 20%Dokument66 SeitenMecanismos 1 20%Ricardo SandovalNoch keine Bewertungen
- CINEmatica - MECANISMO - TareaDokument35 SeitenCINEmatica - MECANISMO - TareaNoyo OcbNoch keine Bewertungen
- Monografia de MecanismosDokument42 SeitenMonografia de MecanismosjoeluczaNoch keine Bewertungen
- Mecánica y MecanismosDokument44 SeitenMecánica y MecanismosCatalina HerreraNoch keine Bewertungen
- Introduccion A Los Mecanismos PDFDokument6 SeitenIntroduccion A Los Mecanismos PDFMary SquerraNoch keine Bewertungen
- Teoria de Maquinas y MecanismosDokument12 SeitenTeoria de Maquinas y MecanismosEdgar ReyesNoch keine Bewertungen
- Introduccion A Los Sistemas MecanicosDokument32 SeitenIntroduccion A Los Sistemas MecanicosCoro GlenisNoch keine Bewertungen
- Portafolio MecanismosDokument8 SeitenPortafolio MecanismosAlfredo Soto PáramoNoch keine Bewertungen
- Introducción Grados de LibertadDokument3 SeitenIntroducción Grados de LibertadAnibalHuamanNoch keine Bewertungen
- 3 Diseño Mecatrónico MecanismosDokument36 Seiten3 Diseño Mecatrónico MecanismosSantiago Camacho ParraNoch keine Bewertungen
- Generalidades de MecanismosDokument6 SeitenGeneralidades de MecanismosNFQRNoch keine Bewertungen
- Trabajo PracticoDokument5 SeitenTrabajo PracticoFernando RuizNoch keine Bewertungen
- Tema 3 Mecanismos y MaquinasDokument20 SeitenTema 3 Mecanismos y MaquinaspoquimonNoch keine Bewertungen
- P 03 Mecanismos Ago19Dokument55 SeitenP 03 Mecanismos Ago19carlos daniel hernandez guzmanNoch keine Bewertungen
- Unidad I - Diagrama Cinemático - Santaella YDokument11 SeitenUnidad I - Diagrama Cinemático - Santaella YYsaac YhofrenNoch keine Bewertungen
- T7. Mecanismos y Maquinas SimplesDokument37 SeitenT7. Mecanismos y Maquinas SimplesJavier Sacristán TrianaNoch keine Bewertungen
- MecanismosDokument5 SeitenMecanismosCristian Eduardo Murillo CamarenaNoch keine Bewertungen
- Mecanismos Apuntes Jose Luis Hernandez Suarez TESCHIDokument61 SeitenMecanismos Apuntes Jose Luis Hernandez Suarez TESCHIJorGe Luiz AmbarioNoch keine Bewertungen
- Cuestionario #1 Analisis TopologicoDokument5 SeitenCuestionario #1 Analisis TopologicoZacarias Vargas100% (1)
- 1.1 Eslabonamientos.Dokument48 Seiten1.1 Eslabonamientos.Kei FreudNoch keine Bewertungen
- Evaluacion 1 y 2 TeoriaDokument57 SeitenEvaluacion 1 y 2 Teoriadiego ISNoch keine Bewertungen
- Maquinas y Mecanismos Introduccion A Los PDFDokument13 SeitenMaquinas y Mecanismos Introduccion A Los PDFantonioNoch keine Bewertungen
- Mecanismos TopologiaDokument10 SeitenMecanismos TopologiaCésar LaraNoch keine Bewertungen
- Cinemática de MecanismosDokument25 SeitenCinemática de MecanismosGabriel CastilloNoch keine Bewertungen
- Mecanismo Biela-Manivela-UNIVERSIDAD MAYADokument84 SeitenMecanismo Biela-Manivela-UNIVERSIDAD MAYARoberto Carlos Gönzàlëz Hërnändëz100% (1)
- ZSjVRU Cap1y2Dokument32 SeitenZSjVRU Cap1y2Erik Ivan Peñuelas CruzNoch keine Bewertungen
- Grados de LibertadDokument25 SeitenGrados de Libertaduriel1293100% (1)
- TAREA GRUPAL ESTATICA II ParcialDokument40 SeitenTAREA GRUPAL ESTATICA II ParcialGuadalupe GuevaraNoch keine Bewertungen
- Resumen Unidad 02Dokument19 SeitenResumen Unidad 02JOSE JESUS MARTINEZ ACOSTANoch keine Bewertungen
- Topología de MaquinasDokument29 SeitenTopología de MaquinasNery CruzNoch keine Bewertungen
- Capitulo 2Dokument5 SeitenCapitulo 2Wilson C VargasNoch keine Bewertungen
- Tema 3 Mecanismos y MaquinasDokument17 SeitenTema 3 Mecanismos y MaquinasJavier García GómezNoch keine Bewertungen
- Mecanismos - Becerra.Berrones - IA.Actividad 3Dokument9 SeitenMecanismos - Becerra.Berrones - IA.Actividad 3Asiel BecerraNoch keine Bewertungen
- TEMA1Dokument9 SeitenTEMA1Lucía Pardo HermosaNoch keine Bewertungen
- Mecanismo 4 Barras ReporteDokument13 SeitenMecanismo 4 Barras ReporteMimi Flores Salazar100% (1)
- Simbologia TMMDokument9 SeitenSimbologia TMMAnonymous ZMwWk2vNoch keine Bewertungen
- Introducción A MecanismosDokument42 SeitenIntroducción A MecanismosDaniel DiazNoch keine Bewertungen
- Movilidad de Un Mecanismo TrabajoDokument7 SeitenMovilidad de Un Mecanismo TrabajoYda Fernandez EspinNoch keine Bewertungen
- Mecanismos 1Dokument94 SeitenMecanismos 1Benhamin Vaz Zu83% (6)
- MECANISMOS1Dokument35 SeitenMECANISMOS1Juan Patiito Reyes GonzalezNoch keine Bewertungen
- Conceptos Generales de MecanismosDokument14 SeitenConceptos Generales de MecanismosMauricio LoachaminNoch keine Bewertungen
- Cinemática de MecanismosDokument6 SeitenCinemática de MecanismosAstrid MeléndezNoch keine Bewertungen
- Grados de LibertadDokument6 SeitenGrados de LibertadOscar MoralesNoch keine Bewertungen
- Grados de Libertad PDFDokument15 SeitenGrados de Libertad PDFYda Fernandez EspinNoch keine Bewertungen
- Par Cinemático y Grados de LibertadDokument4 SeitenPar Cinemático y Grados de Libertadjavier_toca0% (1)
- Trenes de EngranesDokument12 SeitenTrenes de EngranesNery RevillaNoch keine Bewertungen
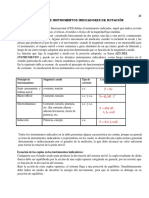
- 5 Dinamica de Los Instrumentos Indicadores de RotacionDokument41 Seiten5 Dinamica de Los Instrumentos Indicadores de Rotacionmilton rafael soriaNoch keine Bewertungen
- Actividades Unidad 4Dokument12 SeitenActividades Unidad 4racso4242Noch keine Bewertungen
- CuestionarioDokument2 SeitenCuestionarioCesar Vera ParamoNoch keine Bewertungen
- Sistemas MecánicosDokument9 SeitenSistemas Mecánicosfranklincadena100% (1)
- Mecanismos Clase 5Dokument20 SeitenMecanismos Clase 5carlos fernando romero hortuaNoch keine Bewertungen
- 1 Teoria de MMDokument91 Seiten1 Teoria de MMMariaCarolinaPalaciosLopezNoch keine Bewertungen
- Unidad 1. Introduccion A Los MecanismosDokument18 SeitenUnidad 1. Introduccion A Los MecanismosDanna LopezNoch keine Bewertungen
- Ejercicios de Integrales de Línea, Superficie y VolumenVon EverandEjercicios de Integrales de Línea, Superficie y VolumenBewertung: 4 von 5 Sternen4/5 (2)
- 2009-Modelo Cognitivo Depresion (Vazquez Et Al) - Ps Conductual 2009Dokument49 Seiten2009-Modelo Cognitivo Depresion (Vazquez Et Al) - Ps Conductual 2009sagpsi4772Noch keine Bewertungen
- 02 - Métodos y Técnicas de Investigación en Psicología de Los Grupos.Dokument16 Seiten02 - Métodos y Técnicas de Investigación en Psicología de Los Grupos.DanielNoch keine Bewertungen
- Implementación de Un Proceso Contable para La Empresa Distribuidora de Llantas AUTOLLANTAS, en La Ciudad de Guayaquil, en El Ejercicio 2013 PDFDokument155 SeitenImplementación de Un Proceso Contable para La Empresa Distribuidora de Llantas AUTOLLANTAS, en La Ciudad de Guayaquil, en El Ejercicio 2013 PDFAlma Grande100% (2)
- 07.-Funcion CreadoraDokument39 Seiten07.-Funcion CreadoraQH Juanka PantojaNoch keine Bewertungen
- Entregable 1 Matematicas DiscretasDokument5 SeitenEntregable 1 Matematicas DiscretasEduardññ35ewAo BrunoNoch keine Bewertungen
- Presentacion de IvestigacionesDokument24 SeitenPresentacion de Ivestigacionesjulio gayNoch keine Bewertungen
- Apuntes ArendtDokument4 SeitenApuntes ArendtElia IbañezNoch keine Bewertungen
- Saber Ver La Arquitectura Bruno ZheviDokument7 SeitenSaber Ver La Arquitectura Bruno ZheviAllan Yilmar Chavez VazquezNoch keine Bewertungen
- Luego de Estudiar El Caso DescritoDokument11 SeitenLuego de Estudiar El Caso DescritoMagda Beatriz Escobar BenavidesNoch keine Bewertungen
- Introducción Al MuestreoDokument24 SeitenIntroducción Al MuestreoJose Norabuena VillarealNoch keine Bewertungen
- Soltar Amarras. Una Introducción A La Salud Mental ColectivaDokument214 SeitenSoltar Amarras. Una Introducción A La Salud Mental ColectivainfoNoch keine Bewertungen
- Derrida, Jacques - Clamor (Glas) Trad. Cristina de Peretti & G. Decontra (Completo, 2015) PDFDokument292 SeitenDerrida, Jacques - Clamor (Glas) Trad. Cristina de Peretti & G. Decontra (Completo, 2015) PDFJohn Rodríguez Saavedra100% (7)
- 9.0 Proyecto de VidaDokument15 Seiten9.0 Proyecto de VidaJess Orduño100% (1)
- 13 2617Dokument102 Seiten13 2617franksn6790Noch keine Bewertungen
- Normas APADokument19 SeitenNormas APAlibia Esther Gomez50% (4)
- Explicación Prueba Clevaer y AplicacionesDokument29 SeitenExplicación Prueba Clevaer y AplicacionesManuel LujanoNoch keine Bewertungen
- Habilidades Sociales y Adicción Al Internet en Adolescentes (2008)Dokument85 SeitenHabilidades Sociales y Adicción Al Internet en Adolescentes (2008)Antonella María De Jesús Napán CarbajalNoch keine Bewertungen
- Sesión 7 Organizadores GráficosDokument5 SeitenSesión 7 Organizadores GráficosAngela Acosta - Josselyn Velasquez100% (1)
- SUBJUNTIVO RaquelDokument22 SeitenSUBJUNTIVO RaquelChiara DalipiNoch keine Bewertungen
- Scaglia H. 2013. Objeto y Metodos de La PsicologiaDokument3 SeitenScaglia H. 2013. Objeto y Metodos de La PsicologiaMicaela LoizzoNoch keine Bewertungen
- Ciencias Sociales 19 de Noviembre Del 2021 Semana 36Dokument3 SeitenCiencias Sociales 19 de Noviembre Del 2021 Semana 36José AriasNoch keine Bewertungen
- DDDDDDDDDDDDDDokument7 SeitenDDDDDDDDDDDDDjosh prooNoch keine Bewertungen
- Filosofia Semana 10 y 11 2do. ParcialDokument4 SeitenFilosofia Semana 10 y 11 2do. ParcialOswaldo AndrésNoch keine Bewertungen
- Tronco de La ViudaDokument2 SeitenTronco de La ViudaArmando Guerrero Rivas100% (2)
- Crucigrama PDFDokument2 SeitenCrucigrama PDFHoover Zuleta RendónNoch keine Bewertungen
- 6 Caracteristicas Basicas VariogramaDokument31 Seiten6 Caracteristicas Basicas Variogramaalexcordovamaco100% (1)
- 032-063 GuiaMat3Dokument32 Seiten032-063 GuiaMat3Alexdanny MajeNoch keine Bewertungen
- Regl Institucional Iestp 2018 2Dokument129 SeitenRegl Institucional Iestp 2018 2milydany33Noch keine Bewertungen
- Tema IDokument2 SeitenTema IBetzaida GarciaNoch keine Bewertungen
- Ejemplo de Plan de IncentivosDokument14 SeitenEjemplo de Plan de IncentivosErikaNoch keine Bewertungen