Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Saet Work AnsDokument5 SeitenSaet Work AnsSeanLejeeBajan89% (27)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Ibbotson Sbbi: Stocks, Bonds, Bills, and Inflation 1926-2019Dokument2 SeitenIbbotson Sbbi: Stocks, Bonds, Bills, and Inflation 1926-2019Bastián EnrichNoch keine Bewertungen
- Manufacturing StrategyDokument31 SeitenManufacturing Strategyrajendra1pansare0% (1)
- Second Moment of InertiaDokument14 SeitenSecond Moment of Inertiaapi-219509070100% (1)
- TurnDokument2 SeitenTurnapi-219509070Noch keine Bewertungen
- Stability - gg1Dokument4 SeitenStability - gg1api-219509070Noch keine Bewertungen
- Eductor SystemDokument8 SeitenEductor Systemapi-219509070Noch keine Bewertungen
- Green Energy From Ballast WaterDokument6 SeitenGreen Energy From Ballast Waterapi-219509070Noch keine Bewertungen
- General Financial RulesDokument9 SeitenGeneral Financial RulesmskNoch keine Bewertungen
- Cryo EnginesDokument6 SeitenCryo EnginesgdoninaNoch keine Bewertungen
- Feasibility Study of Diethyl Sulfate ProductionDokument3 SeitenFeasibility Study of Diethyl Sulfate ProductionIntratec SolutionsNoch keine Bewertungen
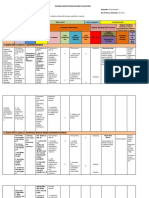
- Building Program Template AY02Dokument14 SeitenBuilding Program Template AY02Amy JaneNoch keine Bewertungen
- Properties of Moist AirDokument11 SeitenProperties of Moist AirKarthik HarithNoch keine Bewertungen
- Transparency Documentation EN 2019Dokument23 SeitenTransparency Documentation EN 2019shani ChahalNoch keine Bewertungen
- Information Security Chapter 1Dokument44 SeitenInformation Security Chapter 1bscitsemvNoch keine Bewertungen
- Material Safety Data Sheet (According To 91/155 EC)Dokument4 SeitenMaterial Safety Data Sheet (According To 91/155 EC)Jaymit PatelNoch keine Bewertungen
- 90FF1DC58987 PDFDokument9 Seiten90FF1DC58987 PDFfanta tasfayeNoch keine Bewertungen
- Difference Between Mountain Bike and BMXDokument3 SeitenDifference Between Mountain Bike and BMXShakirNoch keine Bewertungen
- Ikea AnalysisDokument33 SeitenIkea AnalysisVinod BridglalsinghNoch keine Bewertungen
- Fidp ResearchDokument3 SeitenFidp ResearchIn SanityNoch keine Bewertungen
- Instructions For Microsoft Teams Live Events: Plan and Schedule A Live Event in TeamsDokument9 SeitenInstructions For Microsoft Teams Live Events: Plan and Schedule A Live Event in TeamsAnders LaursenNoch keine Bewertungen
- Cic Tips Part 1&2Dokument27 SeitenCic Tips Part 1&2Yousef AlalawiNoch keine Bewertungen
- A. The Machine's Final Recorded Value Was P1,558,000Dokument7 SeitenA. The Machine's Final Recorded Value Was P1,558,000Tawan VihokratanaNoch keine Bewertungen
- (X-09485) XYLENE RECTIFIED Extra Pure (Mix Isomers)Dokument9 Seiten(X-09485) XYLENE RECTIFIED Extra Pure (Mix Isomers)Bharath KumarNoch keine Bewertungen
- L1 L2 Highway and Railroad EngineeringDokument7 SeitenL1 L2 Highway and Railroad Engineeringeutikol69Noch keine Bewertungen
- Sterling B2B Integrator - Installing and Uninstalling Standards - V5.2Dokument20 SeitenSterling B2B Integrator - Installing and Uninstalling Standards - V5.2Willy GaoNoch keine Bewertungen
- Strobostomp HD™ Owner'S Instruction Manual V1.1 En: 9V DC Regulated 85maDokument2 SeitenStrobostomp HD™ Owner'S Instruction Manual V1.1 En: 9V DC Regulated 85maShane FairchildNoch keine Bewertungen
- Wendi C. Lassiter, Raleigh NC ResumeDokument2 SeitenWendi C. Lassiter, Raleigh NC ResumewendilassiterNoch keine Bewertungen
- Daraman vs. DENRDokument2 SeitenDaraman vs. DENRJeng GacalNoch keine Bewertungen
- ATPDraw 5 User Manual UpdatesDokument51 SeitenATPDraw 5 User Manual UpdatesdoniluzNoch keine Bewertungen
- MDOF (Multi Degre of FreedomDokument173 SeitenMDOF (Multi Degre of FreedomRicky Ariyanto100% (1)
- Cam Action: Series: Inch StandardDokument6 SeitenCam Action: Series: Inch StandardVishwa NNoch keine Bewertungen
- BSCSE at UIUDokument110 SeitenBSCSE at UIUshamir mahmudNoch keine Bewertungen
- Dissertation On Indian Constitutional LawDokument6 SeitenDissertation On Indian Constitutional LawCustomPaperWritingAnnArbor100% (1)
- Building and Other Construction Workers Act 1996Dokument151 SeitenBuilding and Other Construction Workers Act 1996Rajesh KodavatiNoch keine Bewertungen