Das könnte Ihnen auch gefallen
- Material PDFDokument153 SeitenMaterial PDFJinal HiraniNoch keine Bewertungen
- Best Practices For Tomcat SecurityDokument12 SeitenBest Practices For Tomcat SecurityAmit AroraNoch keine Bewertungen
- LCD Based Digital Alarm Clock With Digital Thermometer Using 8051 Microcontroller (AT89C51)Dokument16 SeitenLCD Based Digital Alarm Clock With Digital Thermometer Using 8051 Microcontroller (AT89C51)Vishnu Vijay SNoch keine Bewertungen
- 5W USB Flyback Design ReviewApplication ReportDokument21 Seiten5W USB Flyback Design ReviewApplication ReportleechulmiuNoch keine Bewertungen
- To Make A DC Switching Circuit Using SCR'sDokument2 SeitenTo Make A DC Switching Circuit Using SCR'sH Aries OñaNoch keine Bewertungen
- Neurosurgery, 1000 MCQs - بحث GoogleDokument2 SeitenNeurosurgery, 1000 MCQs - بحث Googleريماالعلي25% (4)
- Liquid PerformanceDokument5 SeitenLiquid PerformanceYoseph Sianturi100% (2)
- Real Time Clock With Alarm Option Using AT89S52 and DS1307 ICDokument13 SeitenReal Time Clock With Alarm Option Using AT89S52 and DS1307 ICkattaa1993Noch keine Bewertungen
- Digital Alarm Clock Using 8051Dokument14 SeitenDigital Alarm Clock Using 8051Akshat Sinha0% (2)
- DS Zadaci PDFDokument23 SeitenDS Zadaci PDFArnela Tatic100% (1)
- How To Interfacing Sensor With LPC2148 ARMDokument8 SeitenHow To Interfacing Sensor With LPC2148 ARMSubir MaityNoch keine Bewertungen
- STM32 RS-485Dokument12 SeitenSTM32 RS-485mail87523Noch keine Bewertungen
- Programming The MCU 8051 PDFDokument48 SeitenProgramming The MCU 8051 PDFDK White LionNoch keine Bewertungen
- Pic-Web Development Board Users Manual: Rev.A, July 2008Dokument14 SeitenPic-Web Development Board Users Manual: Rev.A, July 2008darazzi100% (1)
- HX711Dokument9 SeitenHX711framqz100% (1)
- Interfacing Programs For 8085Dokument37 SeitenInterfacing Programs For 8085archankumarturagaNoch keine Bewertungen
- LF358Dokument6 SeitenLF358kurtm22100% (1)
- Breathing Led Using Msp430Dokument1 SeiteBreathing Led Using Msp430Sudhanshu SethNoch keine Bewertungen
- Generating PWM With PIC Microcontroller - MikroC ProDokument3 SeitenGenerating PWM With PIC Microcontroller - MikroC Proemilfrancu100% (1)
- 8.4 A Case Study: Using LCD Module On DE2 BoardDokument19 Seiten8.4 A Case Study: Using LCD Module On DE2 BoardMas Shari0% (1)
- Metering Application ReportDokument428 SeitenMetering Application ReportRené PereiraNoch keine Bewertungen
- Practical PIC ProjectsDokument14 SeitenPractical PIC ProjectsArdhika Dhennis Putra Ananda100% (1)
- ASKDokument16 SeitenASKAditya AggarwalNoch keine Bewertungen
- 02 - 8051 Timers Counters in CDokument17 Seiten02 - 8051 Timers Counters in Catiqakbar1Noch keine Bewertungen
- 8051 CDokument7 Seiten8051 CTrieu Do MinhNoch keine Bewertungen
- PIC18 Pulse Width ModulationDokument16 SeitenPIC18 Pulse Width ModulationAnoj Pahathkumbura100% (1)
- 5.2 PWM 7 Mac 2017Dokument34 Seiten5.2 PWM 7 Mac 2017Elawarasi Nadarajan100% (1)
- PIC Timer 0 Calculation ExampleDokument3 SeitenPIC Timer 0 Calculation Examplef.last100% (1)
- E 03 B 035Dokument1 SeiteE 03 B 035Tariq Zuhluf100% (1)
- I2C Interface To Serial EEPROMDokument8 SeitenI2C Interface To Serial EEPROMShri Kulkarni100% (1)
- PIC16F877 Timer Modules Tutorials - Timer1Dokument4 SeitenPIC16F877 Timer Modules Tutorials - Timer1RamKumar100% (1)
- Vlsi Lab AssignmentDokument5 SeitenVlsi Lab AssignmentRahul Saxena100% (1)
- Nmos180 LibDokument2 SeitenNmos180 LibKaramveer SinghNoch keine Bewertungen
- Parity Bit Generator Using 3 Input XOR GDokument6 SeitenParity Bit Generator Using 3 Input XOR Gvirat sharma100% (1)
- Manual On Design of LNA Using ADSDokument33 SeitenManual On Design of LNA Using ADSThabasum Aara SNoch keine Bewertungen
- 8051 Microcontroller - Timer ProgrammingDokument16 Seiten8051 Microcontroller - Timer ProgrammingABHISHEK DWIVEDI (RA2111043010082)Noch keine Bewertungen
- Power Electronics QuestionsDokument2 SeitenPower Electronics QuestionsNuñez Djon100% (1)
- CCP ModuleDokument11 SeitenCCP ModuleAltaaf Mulani100% (1)
- Module1 - ARM Microcontroller MIT PortraitDokument21 SeitenModule1 - ARM Microcontroller MIT PortraitRuthvik Thumuluri100% (1)
- EEE316 Experiment 1Dokument12 SeitenEEE316 Experiment 1axeansNoch keine Bewertungen
- Experiment: 06: AIM: To Design and Simulate Ring Oscillator Using Cadence and Compare The Delay BetweenDokument3 SeitenExperiment: 06: AIM: To Design and Simulate Ring Oscillator Using Cadence and Compare The Delay BetweenUttkarsh SinghNoch keine Bewertungen
- 6 SpiDokument36 Seiten6 SpiMalik Adil Farooq50% (2)
- Motor StepperDokument4 SeitenMotor Stepperfavour ukpai100% (1)
- By Marl Us: Lighting The Right To TheDokument7 SeitenBy Marl Us: Lighting The Right To TheGiancarloRichardRivadeneyraMiranda100% (1)
- Signal-Slot in C++Dokument10 SeitenSignal-Slot in C++Don Camillo100% (1)
- A Simple Clock Using DS1307 + PIC16F877A - PIC Microcontroller NoteDokument14 SeitenA Simple Clock Using DS1307 + PIC16F877A - PIC Microcontroller Notelkemmerich100% (2)
- Timer 0Dokument2 SeitenTimer 0andres felipe100% (1)
- Task 3Dokument16 SeitenTask 3Tanmay Abhay Pathak 16BEC0336Noch keine Bewertungen
- Ultrasonic Rangefinder Using 8051Dokument25 SeitenUltrasonic Rangefinder Using 8051Kaos Polos Nakira50% (4)
- LCD4Bit ModDokument5 SeitenLCD4Bit ModCleison Armando Manrique Aguirre100% (1)
- Tutorial 5 SolutionsDokument11 SeitenTutorial 5 SolutionsbarneyNoch keine Bewertungen
- Temperature Sensing/Monitoring Using Lm35 & Atmega8Dokument6 SeitenTemperature Sensing/Monitoring Using Lm35 & Atmega8Suket75% (4)
- 8051 Interfacing With Display SevicesDokument5 Seiten8051 Interfacing With Display Sevicesramjee26100% (1)
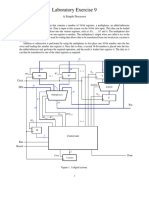
- Lab9 VHDLDokument8 SeitenLab9 VHDLFasli CoolNoch keine Bewertungen
- Line CodingDokument59 SeitenLine CodingFarhan Aditya100% (1)
- BT19ECE067 Assignment 03Dokument11 SeitenBT19ECE067 Assignment 03BT19ECE067 MiteshNoch keine Bewertungen
- Adders and MultipliersDokument59 SeitenAdders and Multipliersdbanbumani_501791840Noch keine Bewertungen
- AVR Microcontroller: Prepared By: Eng. Ashraf DarwishDokument19 SeitenAVR Microcontroller: Prepared By: Eng. Ashraf DarwishHectorLopez100% (2)
- ADC Program For LPC2138Dokument8 SeitenADC Program For LPC2138hypernuclide100% (1)
- Timer/Counter: Modified From Dr. Lam Phung's SlidesDokument96 SeitenTimer/Counter: Modified From Dr. Lam Phung's SlidesAgung Prastyo100% (1)
- Document On Interfacing ADC With 8051 MicrocontrollerDokument5 SeitenDocument On Interfacing ADC With 8051 MicrocontrollerSrideviKumaresanNoch keine Bewertungen
- MB SM19116 ManualDokument2 SeitenMB SM19116 Manualmrjanus100% (1)
- Chương Trình Mẫu Các Bài Tập Học Phần Kỹ Thuật Vi Xử Lý 1. Điều khiển Led đơn và nhận phím bấm sử dụng hàm trễ thời gianDokument34 SeitenChương Trình Mẫu Các Bài Tập Học Phần Kỹ Thuật Vi Xử Lý 1. Điều khiển Led đơn và nhận phím bấm sử dụng hàm trễ thời gianThresh GoldNoch keine Bewertungen
- Robotics Programs PDFDokument19 SeitenRobotics Programs PDFLata SinhaNoch keine Bewertungen
- IEEE'S STD - LOGIC - 1164 Quick Reference CardDokument2 SeitenIEEE'S STD - LOGIC - 1164 Quick Reference CardILikeScribd5050Noch keine Bewertungen
- CobolDokument30 SeitenCobolCesar RenteriaNoch keine Bewertungen
- Ug TRG Prog Fall 2019Dokument17 SeitenUg TRG Prog Fall 2019Muhaamad Haseeb KhokharNoch keine Bewertungen
- Chapter 3 - Syntax AnalyzerDokument28 SeitenChapter 3 - Syntax AnalyzerYitbarek MurcheNoch keine Bewertungen
- Tecnotree Services DatasheetDokument2 SeitenTecnotree Services Datasheetjhtan84Noch keine Bewertungen
- If You Were To Design A Modern CPU From Scratch, How Would You Go About It - QuoraDokument4 SeitenIf You Were To Design A Modern CPU From Scratch, How Would You Go About It - QuoraddsffsddNoch keine Bewertungen
- Icra2010 Marder EppsteinDokument8 SeitenIcra2010 Marder EppsteinP HAMSA DATTANoch keine Bewertungen
- DDE Communication Between InTouchDokument8 SeitenDDE Communication Between InTouchAlexDavid VelardeNoch keine Bewertungen
- Assignment IDokument2 SeitenAssignment IBrabim Manandhar0% (1)
- Pythonwith Spyder An Experiential Learning PerspectiveDokument230 SeitenPythonwith Spyder An Experiential Learning PerspectivePriya kambleNoch keine Bewertungen
- Quality Assurance Audit Area: Audit Plan Product (Aircraft) Audit Y12E, 9N-AKU Audit ObjectivesDokument4 SeitenQuality Assurance Audit Area: Audit Plan Product (Aircraft) Audit Y12E, 9N-AKU Audit ObjectivesKisna BhurtelNoch keine Bewertungen
- Ui5 File Upload PlanningDokument4 SeitenUi5 File Upload PlanningARPITA BISWASNoch keine Bewertungen
- RFIDTaiwan Experience PDFDokument10 SeitenRFIDTaiwan Experience PDFCibyBaby PunnamparambilNoch keine Bewertungen
- SCHEMACSC520Dokument3 SeitenSCHEMACSC520fazaseikoNoch keine Bewertungen
- Online (B2B) Platform For E Tendering & AuctionDokument11 SeitenOnline (B2B) Platform For E Tendering & AuctionAditi EnterprisesNoch keine Bewertungen
- RTS MID AnswersDokument11 SeitenRTS MID AnswershafeezaNoch keine Bewertungen
- SAP Implementation Methodlogies BigBang Vs PhasesDokument6 SeitenSAP Implementation Methodlogies BigBang Vs PhasesLionelkeneth12Noch keine Bewertungen
- Mohsin ResumeDokument3 SeitenMohsin Resumesfaruk89Noch keine Bewertungen
- Astral Column Pipe PricelistDokument4 SeitenAstral Column Pipe PricelistVaishamNoch keine Bewertungen
- StdOut JavaDokument4 SeitenStdOut JavaPutria FebrianaNoch keine Bewertungen
- The Dutch eNIK On Its Way ForwardDokument31 SeitenThe Dutch eNIK On Its Way ForwardElisabeth de LeeuwNoch keine Bewertungen
- Hadmama FinalDokument20 SeitenHadmama FinalBen ShekalimNoch keine Bewertungen
- ANSYS, Inc. Known Issues and LimitationsDokument28 SeitenANSYS, Inc. Known Issues and Limitationsapple.scotch.fool3550Noch keine Bewertungen
- PBLworks Community PhotojournalistDokument2 SeitenPBLworks Community PhotojournalistMarjun CincoNoch keine Bewertungen
- CV2010Dokument3 SeitenCV2010api-26403598Noch keine Bewertungen
- ISO-IEC 20000 Foundation Exam Sample Paper Rationale - January 2014Dokument15 SeitenISO-IEC 20000 Foundation Exam Sample Paper Rationale - January 2014chiwaicNoch keine Bewertungen