Das könnte Ihnen auch gefallen
- Projects With Microcontrollers And PICCVon EverandProjects With Microcontrollers And PICCBewertung: 5 von 5 Sternen5/5 (1)
- Shri Ramdeobaba College of Engineering andDokument18 SeitenShri Ramdeobaba College of Engineering andAditya BelekarNoch keine Bewertungen
- Digital Design and Synthesis: Fall 09Dokument35 SeitenDigital Design and Synthesis: Fall 09Lua Dinh ThiNoch keine Bewertungen
- Lecture 7: Projects 2 and 3Dokument17 SeitenLecture 7: Projects 2 and 3Sivasubramanian ManickamNoch keine Bewertungen
- TỔNG HỢP ÔN TẬP THIẾT KẾ VI MẠCH SỐDokument28 SeitenTỔNG HỢP ÔN TẬP THIẾT KẾ VI MẠCH SỐHải ĐăngNoch keine Bewertungen
- Matrix Multiplication CodeDokument11 SeitenMatrix Multiplication CodeHoàng Long Nguyễn BùiNoch keine Bewertungen
- Verilog Code For AluDokument7 SeitenVerilog Code For Alumeaow88100% (3)
- Verilog Code For AluDokument7 SeitenVerilog Code For Aludivya gogineniNoch keine Bewertungen
- Verilog Code For AluDokument7 SeitenVerilog Code For Aludivya gogineniNoch keine Bewertungen
- RTL and testbenches for synchronous and asynchronous RAM, FIFO and clock bufferDokument23 SeitenRTL and testbenches for synchronous and asynchronous RAM, FIFO and clock bufferSuyash MishraNoch keine Bewertungen
- Detalhes Placa Nano V3Dokument12 SeitenDetalhes Placa Nano V3Luis CarlosNoch keine Bewertungen
- Embedded Software Os Solar Tracker Test BenchDokument3 SeitenEmbedded Software Os Solar Tracker Test BenchRodrigo Ortolá InocentiNoch keine Bewertungen
- Sequential Circuits and Seven Segment Display: Lab Assignment 10Dokument7 SeitenSequential Circuits and Seven Segment Display: Lab Assignment 10Ahmed UzairNoch keine Bewertungen
- All VerilogLabsDokument74 SeitenAll VerilogLabssamruthNoch keine Bewertungen
- Adbms AnkitDokument8 SeitenAdbms Ankitwefot57202Noch keine Bewertungen
- Dataflow Modelling: 1) Logic GatesDokument39 SeitenDataflow Modelling: 1) Logic Gateslilly jamesNoch keine Bewertungen
- Module Dha (A, B, C, S) Input A, B Output C, S Assign S A B Assign C A&B Endmodule Module Tbha - VDokument6 SeitenModule Dha (A, B, C, S) Input A, B Output C, S Assign S A B Assign C A&B Endmodule Module Tbha - Vacco neNoch keine Bewertungen
- DUT SPECIFICATION Interface ConfigurationDokument21 SeitenDUT SPECIFICATION Interface ConfigurationSantoshkumar MalabagiNoch keine Bewertungen
- DSDV Lab Manual PDFDokument15 SeitenDSDV Lab Manual PDFÅᴅᴀʀsʜ Rᴀᴍ100% (3)
- Verilog Modules For Common Digital FunctionsDokument30 SeitenVerilog Modules For Common Digital Functionselle868Noch keine Bewertungen
- Lab Exercise 10-11-12 - PLSQLDokument24 SeitenLab Exercise 10-11-12 - PLSQLRobin VarshneyNoch keine Bewertungen
- Experiment: 1: ObjectDokument13 SeitenExperiment: 1: ObjectAjay SinghNoch keine Bewertungen
- Lab Report: Name: Abdul Rehman Khan STD No: 184311 Lab Assistant: MR Oluwatayomi Rereloluwa AdegboyeDokument20 SeitenLab Report: Name: Abdul Rehman Khan STD No: 184311 Lab Assistant: MR Oluwatayomi Rereloluwa AdegboyeSikandar AliNoch keine Bewertungen
- Unsigned 8-bit divider VHDL codeDokument10 SeitenUnsigned 8-bit divider VHDL codegadhaNoch keine Bewertungen
- Suhas N (Lab Assign 1,2,3)Dokument37 SeitenSuhas N (Lab Assign 1,2,3)Suhas PoliNoch keine Bewertungen
- IR Sensor Line Following RobotDokument5 SeitenIR Sensor Line Following RobotMikoko YanosudaNoch keine Bewertungen
- Digital ExperimentsDokument14 SeitenDigital Experimentsdeekshamb01052001Noch keine Bewertungen
- Verilog Modules For Common Digital FunctionsDokument30 SeitenVerilog Modules For Common Digital Functionssudarshan poojaryNoch keine Bewertungen
- Fix Me PlsDokument5 SeitenFix Me PlsPhan TanNoch keine Bewertungen
- FPGA FINAL EXAM ANSWERS AND VHDL CODEDokument20 SeitenFPGA FINAL EXAM ANSWERS AND VHDL CODEMinhaj FarooqiNoch keine Bewertungen
- Fpga With ps2 KeyboardDokument5 SeitenFpga With ps2 KeyboardLeslie WrightNoch keine Bewertungen
- Practica4 RoboticaDokument6 SeitenPractica4 RoboticaKurokoraNoch keine Bewertungen
- LAB FAT QUESTIONS ANALYSISDokument15 SeitenLAB FAT QUESTIONS ANALYSISSrinivasan UmaNoch keine Bewertungen
- Mobile Robot 1bDokument4 SeitenMobile Robot 1bAbenezer bediluNoch keine Bewertungen
- Codigo Aranha Da WebDokument13 SeitenCodigo Aranha Da WebLuis CarlosNoch keine Bewertungen
- Verilog HDL Synthesis and ImplementationDokument41 SeitenVerilog HDL Synthesis and ImplementationAlexandru OleinicNoch keine Bewertungen
- Verilog Tips & RulesDokument37 SeitenVerilog Tips & RulesSharan ChaitanyaNoch keine Bewertungen
- AGV Project Codes CompilationDokument15 SeitenAGV Project Codes CompilationJhasper ManagyoNoch keine Bewertungen
- LFR CodingDokument6 SeitenLFR CodingDIVYANSHMUDGAL RA1711003020646Noch keine Bewertungen
- Create or Replace Function Fact (N Number) Return Number Is I NUMBER (10) F Number: 1 Begin For I in 1.. N Loop F: F I End Loop Return F EndDokument5 SeitenCreate or Replace Function Fact (N Number) Return Number Is I NUMBER (10) F Number: 1 Begin For I in 1.. N Loop F: F I End Loop Return F EndjyothimidhunaNoch keine Bewertungen
- UART Communication GuideDokument22 SeitenUART Communication GuideanjalisweNoch keine Bewertungen
- Verilog HDL: ModuleDokument9 SeitenVerilog HDL: ModuleAvinash ReddyNoch keine Bewertungen
- CounterDokument34 SeitenCounterAishwarya GajendrulaNoch keine Bewertungen
- Module PISODokument3 SeitenModule PISOAnbuak AnbuakNoch keine Bewertungen
- VerilogDokument6 SeitenVerilogShaik IliyasNoch keine Bewertungen
- UntitledDokument1 SeiteUntitledفارسQ مNoch keine Bewertungen
- Multiplexer 4 Inputs and Test BenchDokument7 SeitenMultiplexer 4 Inputs and Test BenchsagarNoch keine Bewertungen
- New Text DocumentDokument8 SeitenNew Text DocumentMuneeb AhmadNoch keine Bewertungen
- Using Modelsim To Simulate Logic Circuits in Verilog DesignsDokument30 SeitenUsing Modelsim To Simulate Logic Circuits in Verilog DesignsFhatarani Hasya AdilaNoch keine Bewertungen
- Programul robotului in Arduino pentru parcareDokument8 SeitenProgramul robotului in Arduino pentru parcareIlie IulianNoch keine Bewertungen
- Under The Guidance Of: MR .Ajit SinghDokument24 SeitenUnder The Guidance Of: MR .Ajit SinghSandeep SrivastavaNoch keine Bewertungen
- C ProgramsDokument7 SeitenC ProgramsRubini RavichandranNoch keine Bewertungen
- FPGA-BASED N-BIT SERIAL ADDERDokument9 SeitenFPGA-BASED N-BIT SERIAL ADDERayeshaNoch keine Bewertungen
- VHDL Code For Booth MultiplierDokument4 SeitenVHDL Code For Booth MultiplierSwati Sharma100% (1)
- Assignment-5 by Kaneria Dhaval: Verilog Code For Single Cycle ProcessorDokument12 SeitenAssignment-5 by Kaneria Dhaval: Verilog Code For Single Cycle ProcessorSaiteja RayaproluNoch keine Bewertungen
- Arduino Based Motor Driver: Nuudel@must - Edu.mnDokument25 SeitenArduino Based Motor Driver: Nuudel@must - Edu.mnMyagmarjav NuudelNoch keine Bewertungen
- Robotics Set of CodesDokument11 SeitenRobotics Set of CodesGinsell Mae Tanteo SarteNoch keine Bewertungen
- Inspection and Maintenance of Drillpipe Ebook PDFDokument39 SeitenInspection and Maintenance of Drillpipe Ebook PDFAntónio OliveiraNoch keine Bewertungen
- Protection Systems TransformerDokument14 SeitenProtection Systems Transformerrajabharath12Noch keine Bewertungen
- RS-485 2X227 AWG SFUTP PVC - 9FY7F1V129 - V - 1 - R - 1Dokument2 SeitenRS-485 2X227 AWG SFUTP PVC - 9FY7F1V129 - V - 1 - R - 1jeffv65Noch keine Bewertungen
- POSSIBILITIES OF LOW VOLTAGE DC SYSTEMSDokument10 SeitenPOSSIBILITIES OF LOW VOLTAGE DC SYSTEMSTTaanNoch keine Bewertungen
- OD Main Switch & OD OFF Indicator Light CircuitDokument4 SeitenOD Main Switch & OD OFF Indicator Light Circuitcelestino tuliaoNoch keine Bewertungen
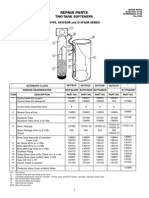
- Star S07FS32DR Water Softener Repair PartsDokument1 SeiteStar S07FS32DR Water Softener Repair PartsBillNoch keine Bewertungen
- Jotafloor SL UniversalDokument6 SeitenJotafloor SL UniversalrogandatambunanNoch keine Bewertungen
- Cheat SheetDokument50 SeitenCheat SheetAnubhav ChaturvediNoch keine Bewertungen
- Tugas 1Dokument8 SeitenTugas 1Muhammad Robby Firmansyah Ar-RasyiedNoch keine Bewertungen
- MGS3750 28FDokument4 SeitenMGS3750 28FAndi Z Pasuloi PatongaiNoch keine Bewertungen
- Assessment of Groundwater Quality Using GIS - A Case Study of The Churu District of RajasthanDokument9 SeitenAssessment of Groundwater Quality Using GIS - A Case Study of The Churu District of RajasthanSivaShankarNoch keine Bewertungen
- Design Rules CMOS Transistor LayoutDokument7 SeitenDesign Rules CMOS Transistor LayoututpalwxyzNoch keine Bewertungen
- Sample Lab ReportDokument4 SeitenSample Lab ReportHolley WrightNoch keine Bewertungen
- PJ1117CM-2 5VDokument6 SeitenPJ1117CM-2 5VАлексей ГомоновNoch keine Bewertungen
- Android Car Navigation User ManualDokument74 SeitenAndroid Car Navigation User ManualРисте ПановNoch keine Bewertungen
- Item No. Specification Requested Offered Specifications 1.1. 1.1 Law and CertificatesDokument23 SeitenItem No. Specification Requested Offered Specifications 1.1. 1.1 Law and CertificatesSaša StankovićNoch keine Bewertungen
- DH3E-L-SC-A3-K-170329-0009 Commissioning Inspection & Test Plan (ITP) For BOP and Associated Test FormsDokument2 SeitenDH3E-L-SC-A3-K-170329-0009 Commissioning Inspection & Test Plan (ITP) For BOP and Associated Test FormsBình Quách HảiNoch keine Bewertungen
- Types of Commercial CellDokument4 SeitenTypes of Commercial CellDaveNoch keine Bewertungen
- Powershift TransmissionsDokument27 SeitenPowershift TransmissionsJonathanDavidDeLosSantosAdornoNoch keine Bewertungen
- Mathcad - Ampacity CalculationDokument76 SeitenMathcad - Ampacity CalculationAlex Ribeiro100% (4)
- Fuels and Heat Power: A Guide to Fuels, Furnaces, and FiringDokument101 SeitenFuels and Heat Power: A Guide to Fuels, Furnaces, and FiringAlyssa Clarizze MalaluanNoch keine Bewertungen
- Questionnaire For Future BLICZerDokument1 SeiteQuestionnaire For Future BLICZerAlejandra GheorghiuNoch keine Bewertungen
- Fundamentals 2014Dokument959 SeitenFundamentals 2014Angelo Vittorio VettorazziNoch keine Bewertungen
- Direct Burial Optic Fiber Cable Specification - KSD2019 PDFDokument5 SeitenDirect Burial Optic Fiber Cable Specification - KSD2019 PDFjerjyNoch keine Bewertungen
- OkDokument29 SeitenOkgouthamlabsNoch keine Bewertungen
- Project Vision DocumentDokument5 SeitenProject Vision DocumentorjuanNoch keine Bewertungen
- YEZ-Conical Brake MotorDokument3 SeitenYEZ-Conical Brake MotorMech MallNoch keine Bewertungen
- Gpa 2145Dokument15 SeitenGpa 2145Sergio David Ruiz100% (1)
- I) CentrifugesDokument46 SeitenI) Centrifugesiahim87Noch keine Bewertungen
- Method Statement For Cable & TerminationDokument6 SeitenMethod Statement For Cable & TerminationRajuNoch keine Bewertungen