Das könnte Ihnen auch gefallen
- DS2 PDFDokument8 SeitenDS2 PDFAbdelilah Elmesbahi100% (1)
- TD Chaines de SolidesDokument2 SeitenTD Chaines de Solidessoufiane8fka100% (2)
- TD Train ÉpicycloïdalDokument5 SeitenTD Train Épicycloïdalpapouch1350% (2)
- COURS Théorie Des Mécanismes PDFDokument5 SeitenCOURS Théorie Des Mécanismes PDFMohamed NaciriNoch keine Bewertungen
- Corrige Examen TM 2018Dokument5 SeitenCorrige Examen TM 2018FAWZI RONALDONoch keine Bewertungen
- Corrigé TD 15 - Liaisons - Schéma CinématiqueDokument6 SeitenCorrigé TD 15 - Liaisons - Schéma Cinématiquebhs channelNoch keine Bewertungen
- Mobilite Et HyperstatismeDokument7 SeitenMobilite Et HyperstatismeFakhreddine Naimi100% (1)
- TD 20 Corrigé - Loi Entrée-Sortie À L'aide D'un Produit Scalaire Constant de Deux Vecteurs D'orientationDokument6 SeitenTD 20 Corrigé - Loi Entrée-Sortie À L'aide D'un Produit Scalaire Constant de Deux Vecteurs D'orientationMönsîeur Abd NourNoch keine Bewertungen
- TD 17 Corrigé - Liaisons Équivalentes PDFDokument6 SeitenTD 17 Corrigé - Liaisons Équivalentes PDFAyoubNoch keine Bewertungen
- TD ConstructionDokument6 SeitenTD ConstructionYoussef TrimechNoch keine Bewertungen
- TD - Théorie Des Mécanismes Pompe À Piston Radial: CorrigéDokument8 SeitenTD - Théorie Des Mécanismes Pompe À Piston Radial: Corrigéسكينة مريم100% (2)
- Chaines de Solides - Comportement CinématiqueDokument8 SeitenChaines de Solides - Comportement CinématiqueAbdelali YacoubiNoch keine Bewertungen
- TD 19 - Lois Entrée-Sortie en Position Et en VitesseDokument10 SeitenTD 19 - Lois Entrée-Sortie en Position Et en Vitessebhs channel100% (2)
- Examens Et TD Corrigés EngrenagesDokument14 SeitenExamens Et TD Corrigés EngrenagesYOUSSEF BOUTIOURENoch keine Bewertungen
- Corr TD 2 Theorie de Mecanisme PDFDokument3 SeitenCorr TD 2 Theorie de Mecanisme PDFMélèk BejiNoch keine Bewertungen
- TD 16 - Lois Entrée-Sortie en Position Et en VitesseDokument6 SeitenTD 16 - Lois Entrée-Sortie en Position Et en Vitessebhs channel0% (1)
- 2 Acouplements PermenantsDokument10 Seiten2 Acouplements Permenantsmejri merin0% (1)
- Exo 2 Pompe Hydraulique CorrigeDokument4 SeitenExo 2 Pompe Hydraulique Corrigeesloch100% (1)
- Mecanismes PDFDokument34 SeitenMecanismes PDFesloch50% (2)
- TD 19 - Loi Entrée-Sortie Par Fermeture CinématiqueDokument4 SeitenTD 19 - Loi Entrée-Sortie Par Fermeture CinématiqueDrisse Achar60% (5)
- 10 Accouplements TemporairesDokument20 Seiten10 Accouplements Temporaireszouhour brahmi100% (1)
- PTSI - TD Analyse Des MecanismesDokument6 SeitenPTSI - TD Analyse Des MecanismesprinceNoch keine Bewertungen
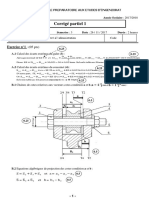
- Corrigé Partiel 1-2018Dokument4 SeitenCorrigé Partiel 1-2018Ramdane BoulahiaNoch keine Bewertungen
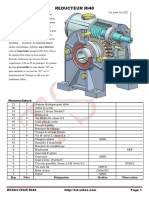
- Reducteur RI40Dokument6 SeitenReducteur RI40watsop75% (4)
- Corrigé de L'examen de SynthèseDokument2 SeitenCorrigé de L'examen de SynthèseMESSAOUI100% (3)
- Met T 25 TD PDokument4 SeitenMet T 25 TD Pkhocine67% (3)
- Mecanismes ExercicesDokument6 SeitenMecanismes ExercicesOumaima BK0% (1)
- Regulateur WattDokument2 SeitenRegulateur WattAmara Neji83% (6)
- Liaisons Equival TDDokument18 SeitenLiaisons Equival TDAyou HamNoch keine Bewertungen
- Cinématique Des Solides - TD1Dokument7 SeitenCinématique Des Solides - TD1Brahim Achayfad80% (5)
- Série Des Tds - N°03: L Es ADokument1 SeiteSérie Des Tds - N°03: L Es Aimade zidaneNoch keine Bewertungen
- Ds Mef 2011 GCV PDFDokument3 SeitenDs Mef 2011 GCV PDFMed Hacen MoustaphaNoch keine Bewertungen
- Modélisation Cinématique Des MécanismesDokument8 SeitenModélisation Cinématique Des MécanismesmounirgemNoch keine Bewertungen
- Guidage en TranslationDokument11 SeitenGuidage en TranslationMohamed Slim KHACHROUMI50% (2)
- Résumé TransmettreDokument18 SeitenRésumé TransmettreMehdi Ben Zouine100% (3)
- 31 EmbrayagesDokument12 Seiten31 EmbrayagesSimoMonkad100% (1)
- TD Révision Cinematique Du SolideDokument8 SeitenTD Révision Cinematique Du SolideRomain MarroNoch keine Bewertungen
- TD 24 - Comportement Statique Des SystèmesDokument8 SeitenTD 24 - Comportement Statique Des Systèmesbhs channel50% (2)
- Serie Des TD N°4 Engrenages EMDokument6 SeitenSerie Des TD N°4 Engrenages EMGrine Salah EddineNoch keine Bewertungen
- TD4 Corrigé DIMENSIONNEMENT ET DUREE DE VIE DES ROULEMENTSDokument7 SeitenTD4 Corrigé DIMENSIONNEMENT ET DUREE DE VIE DES ROULEMENTSأشرف عبودNoch keine Bewertungen
- DS1 StatiqueDokument5 SeitenDS1 StatiqueYassineNoch keine Bewertungen
- GM DS9-2013 CorrigéDokument4 SeitenGM DS9-2013 CorrigéGray AbNoch keine Bewertungen
- TD 10 - Cinmatique Analytique - Composition Des Vecteurs Vitesses Et Champ Des Vecteurs VitessesDokument4 SeitenTD 10 - Cinmatique Analytique - Composition Des Vecteurs Vitesses Et Champ Des Vecteurs VitessesZarroui Abdellah0% (1)
- Devoir de Contrôle N°3 Avec Correction - Génie Mécanique Guidage en Rotation Touret A Meuler - 3ème Technique (2012-2013)Dokument6 SeitenDevoir de Contrôle N°3 Avec Correction - Génie Mécanique Guidage en Rotation Touret A Meuler - 3ème Technique (2012-2013)Kouchad Fouad88% (8)
- TD Statique CinématiqueDokument5 SeitenTD Statique CinématiqueAhmed fattoumNoch keine Bewertungen
- SciesauteusecorrectionDokument3 SeitenSciesauteusecorrectionyumiNoch keine Bewertungen
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysVon EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysNoch keine Bewertungen
- Meca Mobilite Dev PDFDokument8 SeitenMeca Mobilite Dev PDFzizo100% (1)
- ch1 ModelisationDokument9 Seitench1 ModelisationYoussef ElalaouiNoch keine Bewertungen
- DS5 SujetDokument7 SeitenDS5 SujetPierre BeckNoch keine Bewertungen
- TD Helico AscenseurDokument8 SeitenTD Helico AscenseurWakule Christian MurhabaziNoch keine Bewertungen
- Liaisons Mã©caniques Et Schã©ma Cinã©matiqueDokument32 SeitenLiaisons Mã©caniques Et Schã©ma Cinã©matiqueMohamedNoch keine Bewertungen
- Chapitre 4Dokument35 SeitenChapitre 4CHiZORI 19Noch keine Bewertungen
- TD-4 - Cinématique Des Solides Et Des SystèmesDokument3 SeitenTD-4 - Cinématique Des Solides Et Des Systèmesjaberhouda29Noch keine Bewertungen
- Le Calcul de Roulements by FEM With CatiaDokument12 SeitenLe Calcul de Roulements by FEM With CatiaJohn JohnNoch keine Bewertungen
- Chap2 Liaisons Solides VAS2 Potel Gatignol PDFDokument11 SeitenChap2 Liaisons Solides VAS2 Potel Gatignol PDFDamien MirandaNoch keine Bewertungen
- TP Auto MEEA 04 05 PDFDokument88 SeitenTP Auto MEEA 04 05 PDFYassine RabhiNoch keine Bewertungen
- 1-Mise Sous Forme EtatDokument8 Seiten1-Mise Sous Forme EtatAllel BradleyNoch keine Bewertungen
- Exercices d'intégrales de lignes, de surfaces et de volumesVon EverandExercices d'intégrales de lignes, de surfaces et de volumesNoch keine Bewertungen
- PPN GMP 255225 BoDokument98 SeitenPPN GMP 255225 BoJaouad ElNoch keine Bewertungen
- Le Pont Diviseur de Tension CorrectionDokument5 SeitenLe Pont Diviseur de Tension CorrectionJaouad ElNoch keine Bewertungen
- Coursd'Dokument64 SeitenCoursd'Jaouad ElNoch keine Bewertungen
- Support Cours ERPDokument158 SeitenSupport Cours ERPJaouad El100% (2)
- Emboutissage 2émé AnnéeDokument31 SeitenEmboutissage 2émé AnnéeMohamed Obey70% (10)
- ProcedesDokument13 SeitenProcedesJaouad ElNoch keine Bewertungen
- QuestionnaireDokument3 SeitenQuestionnaireJaouad ElNoch keine Bewertungen
- Rapport MS ProgetDokument45 SeitenRapport MS ProgetPatrice EmeryNoch keine Bewertungen
- QuestionnaireDokument3 SeitenQuestionnaireJaouad ElNoch keine Bewertungen
- TP3procedes ElaborationDokument2 SeitenTP3procedes ElaborationJaouad ElNoch keine Bewertungen
- Atelier Pgi Open ErpDokument16 SeitenAtelier Pgi Open ErpJaouad ElNoch keine Bewertungen
- DS Forgeage 2007 - S8Dokument5 SeitenDS Forgeage 2007 - S8Jaouad ElNoch keine Bewertungen
- CM 04 05Dokument39 SeitenCM 04 05Jaouad ElNoch keine Bewertungen
- Diaporama ForgeDokument45 SeitenDiaporama ForgeJaouad El100% (1)
- TP3moulage ChariotDokument6 SeitenTP3moulage ChariotJaouad ElNoch keine Bewertungen
- Gestion CoutsDokument13 SeitenGestion Coutskyle_namgal1679Noch keine Bewertungen
- La Commande NumeriqueDokument18 SeitenLa Commande NumeriqueqaadilNoch keine Bewertungen
- Cours Sur La Numeration-CodageDokument10 SeitenCours Sur La Numeration-CodageJaouad ElNoch keine Bewertungen
- ch1 Systemenumeration PDFDokument6 Seitench1 Systemenumeration PDFDali GsNoch keine Bewertungen
- Lois Fondamentales - ElectriciteDokument42 SeitenLois Fondamentales - ElectriciteN.NASRI Matlablog100% (4)
- Solution ResistancesDokument1 SeiteSolution ResistancesJaouad ElNoch keine Bewertungen
- Systemescombinatoires 111124152740 Phpapp01Dokument5 SeitenSystemescombinatoires 111124152740 Phpapp01Jaouad ElNoch keine Bewertungen
- Electricitegeneraleh 111020212254 Phpapp02Dokument95 SeitenElectricitegeneraleh 111020212254 Phpapp02Jaouad ElNoch keine Bewertungen
- TD1Dokument2 SeitenTD1Jaouad El0% (3)
- GRAFCET Et AutomatismeDokument41 SeitenGRAFCET Et AutomatismeEden Ben80% (5)
- Presentation Automatisme 2007-08Dokument71 SeitenPresentation Automatisme 2007-08Jaouad ElNoch keine Bewertungen
- Analyse Économique Du ProjetDokument5 SeitenAnalyse Économique Du ProjetJaouad ElNoch keine Bewertungen
- Diagramme de GanttDokument13 SeitenDiagramme de GanttJaouad ElNoch keine Bewertungen
- Analyse Financière Du ProjetDokument4 SeitenAnalyse Financière Du ProjetJaouad ElNoch keine Bewertungen
- Epreuve de Sciences Industrielles C Epreuve de Sciences Industrielles CDokument16 SeitenEpreuve de Sciences Industrielles C Epreuve de Sciences Industrielles CYann LarruyNoch keine Bewertungen
- Cours Principe Fondamentale de La Statique ProfDokument5 SeitenCours Principe Fondamentale de La Statique ProfJunior BoumNoch keine Bewertungen
- Cours TreillisDokument37 SeitenCours TreillisRealmak AwaNoch keine Bewertungen
- Etude Des Dalots Avec RDMDokument21 SeitenEtude Des Dalots Avec RDMBadra Ali Sanogo100% (1)
- Cours 2017 - rdm2 PDFDokument197 SeitenCours 2017 - rdm2 PDFMahad AbdiNoch keine Bewertungen
- Rapport TP RDMDokument52 SeitenRapport TP RDMNouha Alami85% (20)
- Cinematique PolyDokument13 SeitenCinematique PolyHAJNoch keine Bewertungen
- Rideau de PalplancheDokument17 SeitenRideau de PalplanchesamirNoch keine Bewertungen
- Exercice About Using Solid WorkDokument42 SeitenExercice About Using Solid WorkTiêu TrúcNoch keine Bewertungen
- Gouyou Doriane 2018Dokument157 SeitenGouyou Doriane 2018nouhaila RahmouniNoch keine Bewertungen
- Methode Des ForcesDokument3 SeitenMethode Des ForcesBassa Jean-Daniel100% (2)
- Chaines de Solides - Comportement CinématiqueDokument8 SeitenChaines de Solides - Comportement CinématiqueAbdelali YacoubiNoch keine Bewertungen
- CH3 La StatiqueDokument12 SeitenCH3 La StatiqueMar WaNoch keine Bewertungen
- EAD - Correction DC - 2019Dokument11 SeitenEAD - Correction DC - 2019Rayen AbNoch keine Bewertungen
- TD1 - SujetDokument14 SeitenTD1 - Sujetfrançois lutorNoch keine Bewertungen
- Cours M 2 CotationDokument11 SeitenCours M 2 CotationPaulHochonNoch keine Bewertungen
- 1999 Mines Psi Cellule de Tri - SujetDokument16 Seiten1999 Mines Psi Cellule de Tri - SujetKarell Romulus AKOUETENoch keine Bewertungen
- 2.équilibre Global de La PoutreDokument1 Seite2.équilibre Global de La PoutrerouxmatheoNoch keine Bewertungen
- MDS CH-56Dokument28 SeitenMDS CH-56AyoubNoch keine Bewertungen
- Chapitre 3Dokument15 SeitenChapitre 3Choayb Belghiat0% (1)
- RDM s2Dokument51 SeitenRDM s2Nabil LebigNoch keine Bewertungen
- Par L'expérience: Résistance Des Matériaux Et Dimensionnement Des StructuresDokument339 SeitenPar L'expérience: Résistance Des Matériaux Et Dimensionnement Des StructuresghjlNoch keine Bewertungen
- M14 - Elaboration D'un Dossier de Fabrication PDFDokument81 SeitenM14 - Elaboration D'un Dossier de Fabrication PDFHamza Ben Haddi100% (1)
- Diapos - Cours Poutres Mixtes Acier BétonDokument38 SeitenDiapos - Cours Poutres Mixtes Acier Bétonlolitta noraNoch keine Bewertungen
- Etude de L'isostatismeDokument7 SeitenEtude de L'isostatismekamal belkacemNoch keine Bewertungen
- Chapitre 01 - Poutres en Treilles Articules 2019Dokument11 SeitenChapitre 01 - Poutres en Treilles Articules 2019rabehiNoch keine Bewertungen
- Centrale 2002 Si PSIDokument22 SeitenCentrale 2002 Si PSIbackhousiaNoch keine Bewertungen
- CCP PSI 2022 - CorrigéDokument28 SeitenCCP PSI 2022 - Corrigépp.waxy66950% (2)