Das könnte Ihnen auch gefallen
- Bump AroundDokument3 SeitenBump AroundlabstudentNoch keine Bewertungen
- 2.2 - Basic Movement - Basic Turning PDFDokument27 Seiten2.2 - Basic Movement - Basic Turning PDFArham QaisarNoch keine Bewertungen
- Gyro TurningDokument13 SeitenGyro Turningsuthirth pNoch keine Bewertungen
- Moving StraightDokument11 SeitenMoving Straightsalma yassinNoch keine Bewertungen
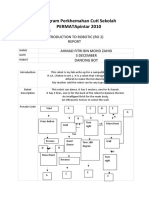
- Dancing BotDokument3 SeitenDancing BotAhmad FitriNoch keine Bewertungen
- IDH Motor Starting CalDokument5 SeitenIDH Motor Starting CalJacob PhilipNoch keine Bewertungen
- Beginner Programming Lesson: Basic TurningDokument11 SeitenBeginner Programming Lesson: Basic TurningZyber Dcode SirRodNoch keine Bewertungen
- Standard VOR ProceduresDokument5 SeitenStandard VOR ProceduresMico RiveraNoch keine Bewertungen
- Stopwatch - Instructions S2Dokument1 SeiteStopwatch - Instructions S2JamNoch keine Bewertungen
- Robotics Book Level2Dokument68 SeitenRobotics Book Level2shaheenonly786Noch keine Bewertungen
- Flowcharts PDFDokument9 SeitenFlowcharts PDFceciceciceci100% (1)
- RNAVDokument1 SeiteRNAVMichael Ramos Jr.Noch keine Bewertungen
- EMT05-Lesson 2Dokument72 SeitenEMT05-Lesson 2cutiepieNoch keine Bewertungen
- Robopet ManualDokument16 SeitenRobopet ManualalfredoxxxxNoch keine Bewertungen
- MovingstraightDokument12 SeitenMovingstraightapi-414493528Noch keine Bewertungen
- Lesson 10: Acceleration: A Change in SpeedDokument4 SeitenLesson 10: Acceleration: A Change in SpeedJames JacobNoch keine Bewertungen
- FlowchartsDokument9 SeitenFlowchartsTorres AddoNoch keine Bewertungen
- Ozobot Color Codes ReferenceDokument2 SeitenOzobot Color Codes ReferenceRonaldNoch keine Bewertungen
- Ozobot Ozocodes ReferenceDokument2 SeitenOzobot Ozocodes ReferenceandresNoch keine Bewertungen
- UYP High FrequencyDokument23 SeitenUYP High FrequencyIGNACIO ALONSO CHAVEZ RUBILARNoch keine Bewertungen
- Worksheet3 Claponclapoff2013Dokument2 SeitenWorksheet3 Claponclapoff2013api-239713754Noch keine Bewertungen
- RCX Workshop Day 2: Programming With - Touch Sensor - Light Sensor RepeatDokument16 SeitenRCX Workshop Day 2: Programming With - Touch Sensor - Light Sensor Repeatcohoonr100% (2)
- Lesson 10: Acceleration: A Change in SpeedDokument4 SeitenLesson 10: Acceleration: A Change in SpeedGajendraNoch keine Bewertungen
- DP Operator Manual: Section 4 Theory of OperationDokument9 SeitenDP Operator Manual: Section 4 Theory of OperationKunal SinghNoch keine Bewertungen
- Flowchart 7Dokument1 SeiteFlowchart 7Phan Dương KhiemNoch keine Bewertungen
- Jumbo Tile Frenzy Flick 180: Aimer7Dokument2 SeitenJumbo Tile Frenzy Flick 180: Aimer7Ignjat RadojicicNoch keine Bewertungen
- Jumbo Tile Frenzy Flick 180: Aimer7Dokument2 SeitenJumbo Tile Frenzy Flick 180: Aimer7Ignjat RadojicicNoch keine Bewertungen
- FlowchartDokument4 SeitenFlowchartRaju top 1234Noch keine Bewertungen
- 13.logo Language Solving Turtle QuestionsDokument13 Seiten13.logo Language Solving Turtle QuestionsSadman SameerNoch keine Bewertungen
- How To Solve Turtle Logo QuestionsDokument13 SeitenHow To Solve Turtle Logo QuestionsSadman SameerNoch keine Bewertungen
- Beginner Programming Lesson: Moving StraightDokument12 SeitenBeginner Programming Lesson: Moving StraightZyber Dcode SirRodNoch keine Bewertungen
- Clase 3 Scratch TurningDokument12 SeitenClase 3 Scratch TurningSandra Patricia Motoa SabalaNoch keine Bewertungen
- Manual 180611190054Dokument13 SeitenManual 180611190054DINESH SAI DEVARASETTYNoch keine Bewertungen
- Cooperative Motion For Arc WeldingDokument9 SeitenCooperative Motion For Arc WeldingSeba O.Noch keine Bewertungen
- qw5345 PDFDokument1 Seiteqw5345 PDFBayu NugrohoNoch keine Bewertungen
- CPJ 200 J1 j1-08 Troubleshootingmod r1 2012-09-10Dokument33 SeitenCPJ 200 J1 j1-08 Troubleshootingmod r1 2012-09-10ngocbienk56Noch keine Bewertungen
- ABB RobotStudio Software ProcedureDokument7 SeitenABB RobotStudio Software ProcedureLopaNoch keine Bewertungen
- Tuning FlowchartDokument1 SeiteTuning Flowchartwizardzx2Noch keine Bewertungen
- Ozobot Ozocodes ReferenceDokument2 SeitenOzobot Ozocodes Referenceapi-259949785Noch keine Bewertungen
- John Paul BSIT 112Dokument7 SeitenJohn Paul BSIT 112John Paul TogononNoch keine Bewertungen
- 2019 Formula List 5105 PDFDokument5 Seiten2019 Formula List 5105 PDFErwinNoch keine Bewertungen
- Basic Syntax On RC 7 PDFDokument5 SeitenBasic Syntax On RC 7 PDFRanti RahmadewiNoch keine Bewertungen
- Board Layout: Sequence of Operation Safety PrecautionsDokument1 SeiteBoard Layout: Sequence of Operation Safety PrecautionsNaveed AliNoch keine Bewertungen
- God Routine5Dokument3 SeitenGod Routine5kenzutoszefNoch keine Bewertungen
- 8WC 2020 - Wow 10 PDFDokument2 Seiten8WC 2020 - Wow 10 PDFBNoch keine Bewertungen
- MOZA Slypod User ManualDokument14 SeitenMOZA Slypod User ManualAlberto DastisNoch keine Bewertungen
- Casio Evf600Dokument1 SeiteCasio Evf600CloudNoch keine Bewertungen
- Tory Burch InstructionsDokument5 SeitenTory Burch InstructionsvesanvdwNoch keine Bewertungen
- Small 18Dokument69 SeitenSmall 18rishi keshNoch keine Bewertungen
- Spacecraft Dynamics and Control: Matthew M. PeetDokument33 SeitenSpacecraft Dynamics and Control: Matthew M. PeetJORGE IVAN ZULUAGA CALLEJASNoch keine Bewertungen
- bài tập lớn kiến trúc máy tínhDokument5 Seitenbài tập lớn kiến trúc máy tínhBùi Nguyên BìnhNoch keine Bewertungen
- Worksheet2 Rightface2013Dokument3 SeitenWorksheet2 Rightface2013api-233732442Noch keine Bewertungen
- Getting To Grips With Your Yaw MomentsDokument2 SeitenGetting To Grips With Your Yaw MomentstrisinoNoch keine Bewertungen
- Candito Deadlift Program: What Date Do You Want To Start The Program?Dokument16 SeitenCandito Deadlift Program: What Date Do You Want To Start The Program?Nishant GuptaNoch keine Bewertungen
- LEARNING OBJECTIVES: Learn Decision Making (Switches), To: Move SteeringDokument1 SeiteLEARNING OBJECTIVES: Learn Decision Making (Switches), To: Move SteeringLeandro BritoNoch keine Bewertungen
- Casio Model 5372 Operating GuideDokument1 SeiteCasio Model 5372 Operating GuidenhamarasingheNoch keine Bewertungen
- Operation Guide 5490: © 2016 Casio Computer Co., LTDDokument1 SeiteOperation Guide 5490: © 2016 Casio Computer Co., LTDcalitzerNoch keine Bewertungen
- Blachman Family Tree 09Dokument5 SeitenBlachman Family Tree 09labstudentNoch keine Bewertungen
- Copter GameDokument3 SeitenCopter GamelabstudentNoch keine Bewertungen
- Quicktime™ and A Animation Decompressor Are Needed To See This PictureDokument98 SeitenQuicktime™ and A Animation Decompressor Are Needed To See This PicturelabstudentNoch keine Bewertungen
- Your First GameDokument5 SeitenYour First GamelabstudentNoch keine Bewertungen
- TweakGame RubricDokument1 SeiteTweakGame RubriclabstudentNoch keine Bewertungen
- Scratch Syntax 1Dokument10 SeitenScratch Syntax 1labstudentNoch keine Bewertungen
- HW 2 CatwalkDokument7 SeitenHW 2 CatwalklabstudentNoch keine Bewertungen
- Circumference DistanceDokument1 SeiteCircumference DistancelabstudentNoch keine Bewertungen
- Getting Started WithDokument14 SeitenGetting Started WithlabstudentNoch keine Bewertungen
- Awesome BasicsDokument1 SeiteAwesome BasicslabstudentNoch keine Bewertungen
- Technic 101Dokument15 SeitenTechnic 101labstudent100% (1)
- Pseudo CodeDokument1 SeitePseudo CodelabstudentNoch keine Bewertungen
- Writing Efficient NXT-G ProgramsDokument6 SeitenWriting Efficient NXT-G ProgramsJeff PujiantoNoch keine Bewertungen
- Catt BotDokument27 SeitenCatt Botiky77Noch keine Bewertungen
- Understanding The LEGO Mindstorms NXT PiecesDokument15 SeitenUnderstanding The LEGO Mindstorms NXT PieceslabstudentNoch keine Bewertungen
- Shimul ResumeDokument3 SeitenShimul ResumeMunzurul kaderNoch keine Bewertungen
- St. Paul University Philippines: Office of The RegistrarDokument3 SeitenSt. Paul University Philippines: Office of The RegistrarNokz M. Raki-inNoch keine Bewertungen
- 135 To 150 Mcqs Word Best McqsDokument3 Seiten135 To 150 Mcqs Word Best McqsSaadNoch keine Bewertungen
- Dca Note BookDokument88 SeitenDca Note BookŚîbá ĐõräNoch keine Bewertungen
- Introduction To Python Programming - TheoryDokument3 SeitenIntroduction To Python Programming - TheoryDhruv SojitraNoch keine Bewertungen
- Mapxtreme 2008 V6.8.0 Release Notes: List of TopicsDokument28 SeitenMapxtreme 2008 V6.8.0 Release Notes: List of TopicsHridayesh RawalNoch keine Bewertungen
- DR3000 Film Digitisation SystemDokument4 SeitenDR3000 Film Digitisation SystemMuthu KumaranNoch keine Bewertungen
- Business Analyst BaselII CoREP Rep PuneDokument2 SeitenBusiness Analyst BaselII CoREP Rep PuneJoseph JanisNoch keine Bewertungen
- Pt855tadm b112016Dokument406 SeitenPt855tadm b112016viktorNoch keine Bewertungen
- Sophisticated Analytical Instrument Facility: Ft-Raman User InformationDokument1 SeiteSophisticated Analytical Instrument Facility: Ft-Raman User Informationchanjaneyulu9Noch keine Bewertungen
- CICS by PaiDokument151 SeitenCICS by PaiveerakaarthiNoch keine Bewertungen
- Oracle Backup and RecoveryDokument55 SeitenOracle Backup and RecoverySantanu Das100% (1)
- Alcatel Definitive System Guide PDFDokument12 SeitenAlcatel Definitive System Guide PDFSamuel Mares PalafoxNoch keine Bewertungen
- Bill of Materials in Sap PP Beginners GuideDokument64 SeitenBill of Materials in Sap PP Beginners GuideAnil ObilisettiNoch keine Bewertungen
- Siebel CRM (Satyam) PDFDokument2 SeitenSiebel CRM (Satyam) PDFsridhar_eeNoch keine Bewertungen
- Mathematics T Trial Paper Semester 2Dokument5 SeitenMathematics T Trial Paper Semester 2Loo Siaw Choon100% (1)
- Floating Point DSPs by BhaskarDokument44 SeitenFloating Point DSPs by BhaskarSai Anirudh SanagaramNoch keine Bewertungen
- Scan Conversion: DDA AlgorithmDokument4 SeitenScan Conversion: DDA AlgorithmPiyush MudelaNoch keine Bewertungen
- NII Sample PT Report PDFDokument23 SeitenNII Sample PT Report PDFnieltalkxNoch keine Bewertungen
- Spiking-Diffusion Vector Quantized Discrete Diffusion Model With Spiking Neural NetworksDokument6 SeitenSpiking-Diffusion Vector Quantized Discrete Diffusion Model With Spiking Neural Networkslimingjia1999Noch keine Bewertungen
- Y2k Project Work On Emr (New)Dokument114 SeitenY2k Project Work On Emr (New)Otunuya Chukwudi Henry EngrNoch keine Bewertungen
- Quick Help For EDI SEZ IntegrationDokument2 SeitenQuick Help For EDI SEZ IntegrationsrinivasNoch keine Bewertungen
- 07cp18 Neural Networks and Applications 3 0 0 100Dokument2 Seiten07cp18 Neural Networks and Applications 3 0 0 100tkec_csedeptNoch keine Bewertungen
- Greer Citizen E-Edition 11.21.18Dokument16 SeitenGreer Citizen E-Edition 11.21.18greercitizenNoch keine Bewertungen
- Comp Arch Syllabus 6-29-2017Dokument4 SeitenComp Arch Syllabus 6-29-2017Karthikeya MamillapalliNoch keine Bewertungen
- Este Material Foi Escrito e Postado No (: PeixeDokument3 SeitenEste Material Foi Escrito e Postado No (: PeixelionleooNoch keine Bewertungen
- RevitDokument6 SeitenRevitsuhail.akhoon100% (1)
- VTL-Value: Solaris Quick Start Guide v1.3 Feb 2009Dokument5 SeitenVTL-Value: Solaris Quick Start Guide v1.3 Feb 2009antogonisNoch keine Bewertungen
- SK Getting Started With PICkit 2 App 2Dokument8 SeitenSK Getting Started With PICkit 2 App 2Luis NavarroNoch keine Bewertungen
- Quality RegisterDokument3 SeitenQuality RegisterKelvin de WaeleNoch keine Bewertungen