Beruflich Dokumente
Kultur Dokumente
Curs IV
Hochgeladen von
Diana AnghelOriginaltitel
Copyright
Verfügbare Formate
Dieses Dokument teilen
Dokument teilen oder einbetten
Stufen Sie dieses Dokument als nützlich ein?
Sind diese Inhalte unangemessen?
Dieses Dokument meldenCopyright:
Verfügbare Formate
Curs IV
Hochgeladen von
Diana AnghelCopyright:
Verfügbare Formate
MASTER MASTER
Disciplina Disciplina: : Biomecanic Biomecanic
Curs IV Curs IV
Biomecanica corpului uman
Biomecanica corpului uman
corelat
corelat
cu activit
cu activit
ile impuse
ile impuse
Mersul este deprinderea motorie prin care se realizeaz Mersul este deprinderea motorie prin care se realizeaz n mod obi n mod obi nuit nuit
deplas deplas rile corpului omenesc. Me rile corpului omenesc. Mecanismul principal pe care se bazeaz canismul principal pe care se bazeaz
mersul este mi mersul este mi carea alternativ carea alternativ i constant i constant a celor dou a celor dou membre membre
inferioare, care inferioare, care i asum i asum pe rnd func pe rnd func ia de suport ia de suport i func i func ia de propulsor. ia de propulsor.
Acest mecanism a fost denumit de Steindler Acest mecanism a fost denumit de Steindler alternating bipedalism", alternating bipedalism", iar iar
de Oliver Holmes de Oliver Holmes o c o c dere continu dere continu cu ridicare proprie continu cu ridicare proprie continu (self (self- -
recovery)". recovery)".
Traiectoria centrului de greutate Traiectoria centrului de greutate i ac i ac iunea for iunea for elor exterioare. elor exterioare.
Mersul, ca orice deprindere motorie, se bazeaz Mersul, ca orice deprindere motorie, se bazeaz pe ac pe ac iuni biomecanice. iuni biomecanice.
Corpul omenesc, considerat un mobil, este supus Corpul omenesc, considerat un mobil, este supus n deplasare ac n deplasare ac iunii iunii
urm urm toarelor for toarelor for e care ac e care ac ioneaz ioneaz asupra centrului de greutate (C): asupra centrului de greutate (C):
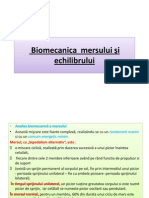
gravitatea (Gr), care gravitatea (Gr), care- -l atrage l atrage n jos n jos i rezisten i rezisten a aerului (A) care i se opune a aerului (A) care i se opune
din fa din fa (fig. (fig. 4.1). 4.1). Aceste dou Aceste dou for for e, conform principiului paralelogramului e, conform principiului paralelogramului
for for elor, dau rezultanta R, care trebuie elor, dau rezultanta R, care trebuie nvins nvins de for de for a F. a F. Pentru a fi Pentru a fi
posibil posibil deplasarea, for deplasarea, for a F trebuie s a F trebuie s dep dep easc easc cu pu cu pu in in n valoare n valoare
rezultanta R (fig. 4.2). rezultanta R (fig. 4.2).
1.1 Biomecanica micrii de mers normal i alergare
Figura 4.1 Forele
care ac-ioneaz
asupra centrului de
greutate n mers.
Figura 4.2 Fora F depete
rezultanta R n mersul normal
(a), n mersul cu greuti (b) i
n mersul cu vnt n fa (c).
Oscila Oscila iile corpului. iile corpului. n timpul mersului, corpul execut n timpul mersului, corpul execut n plus oscila n plus oscila ii ii n sens vertical, transversal n sens vertical, transversal i longitudinal, i longitudinal,
care complic care complic adev adev rata traiectorie pe care o parcurge centrul de greutate. rata traiectorie pe care o parcurge centrul de greutate.
Oscila Oscila iile verticale, iile verticale, n medie de 4,5 cm (Saunders) sau 4 n medie de 4,5 cm (Saunders) sau 4 6 cm (Demeny), au maximele 6 cm (Demeny), au maximele n momentul verticalei n momentul verticalei i i
minimele minimele n perioadele de sprijin bilateral. n perioadele de sprijin bilateral.
Deci, Deci, n timp ce membrul pendulant execut n timp ce membrul pendulant execut faza posterioar faza posterioar , corpul se ridic , corpul se ridic , iar , iar n timp ce membrul pendulant n timp ce membrul pendulant
execut execut pasul anterior, corpul coboar pasul anterior, corpul coboar . .
Oscila Oscila iile transversale, iile transversale, de 4,4 cm (Saunders), au maxima de 4,4 cm (Saunders), au maxima n momentul verticalei n momentul verticalei i corespund i corespund nclin nclin rilor rilor
alternative ale trunchiului pe partea mem alternative ale trunchiului pe partea mem- -brului de sprijin. Ele au scopul de a apropia proiec brului de sprijin. Ele au scopul de a apropia proiec ia centrului de greutate ia centrului de greutate
de baz de baz de sus de sus inere. inere.
Oscila Oscila iile longitudinale iile longitudinale redau redau nclin nclin rile trunchiului rile trunchiului n sens anteroposterior. n sens anteroposterior. n perioada de sprijin bilateral, corpul n perioada de sprijin bilateral, corpul
are o pozi are o pozi ie vertical ie vertical ; ; n faza posterioar n faza posterioar a perioadei de sprijin unilateral, el se a perioadei de sprijin unilateral, el se nclin nclin napoi; napoi; n momentul n momentul
verticalei are din nou o pozi verticalei are din nou o pozi ie vertical ie vertical , iar , iar n faza anterioar n faza anterioar a perioadei de sprijin unilateral se a perioadei de sprijin unilateral se nclin nclin nainte. nainte.
n afara deplas n afara deplas rilor verticale rilor verticale i transversale, bazinul prezint i transversale, bazinul prezint i o mi i o mi care de rota care de rota ie ie n jurul unui ax vertical de n jurul unui ax vertical de
cte 4 cte 4 de fiecare parte ( de fiecare parte ( n total 8 n total 8 ), precum ), precum i o mi i o mi care de rota care de rota ie ie n jurul unui ax anteroposterior. de c n jurul unui ax anteroposterior. de c te 5 te 5
(Saunders). (Saunders).
Traiectoria centrului de greutate nu este deci rectilinie, ci si Traiectoria centrului de greutate nu este deci rectilinie, ci sinuoas nuoas . Corpul omenesc . Corpul omenesc n mers nu se n mers nu se nfige nfige n spa n spa iu, iu,
ci se ci se n n urubeaz urubeaz n el n el
(fig. 4.3). (fig. 4.3).
Figura 4.3 Traiectoria
centrului de greutate principal
al corpului n timpul mersului
i alergrii.
Fazele mersului. Fazele mersului. Ca Ca n orice mi n orice mi care pe care o execut care pe care o execut corpul omenesc, primul corpul omenesc, primul
impuls porne impuls porne te din apropierea centrului de greutate. te din apropierea centrului de greutate. Trunchiul se apleac Trunchiul se apleac nainte, nainte,
pentru ca proiec pentru ca proiec ia centrului de greutate s ia centrului de greutate s treac treac naintea bazei de sus naintea bazei de sus inere; inere;
aproape concomitent, membrul inferior se extinde aproape concomitent, membrul inferior se extinde i corpul este proiectat i corpul este proiectat nainte nainte i i
pu pu in in n sus; tot concomitent, cel n sus; tot concomitent, cel lalt membru inferior, care devine pendulant, lalt membru inferior, care devine pendulant,
p p r r se se te solul te solul i este proiectat i este proiectat naintea membrului de sprijin naintea membrului de sprijin i fixat din nou pe i fixat din nou pe
sol. Lu sol. Lucrurile se repet crurile se repet apoi cu membrele inversate. apoi cu membrele inversate.
Mersul Mersul se se compune compune din din perioade perioade de de sprijin sprijin unilateral, separate unilateral, separate ntre ntre ele ele prin prin
perioade perioade de de sprijin sprijin dublu dublu (fig. 4.4). (fig. 4.4). Pasul Pasul" a " a fost fost diferit diferit interpretat interpretat. . Pentru Pentru Littre Littre ar ar
corespunde corespunde intervalului intervalului dintre dintre dou dou sprijine sprijine, , iar iar pentru pentru Marey Marey unui unui pas pas dublu dublu, care , care
corespunde corespunde seriei seriei de de mi mi c c ri ri ce ce se se succed succed ntre ntre cele cele dou dou pozi pozi ii ii identice identice ale ale unui unui
singur singur picior picior. . Aceast Aceast ultim ultim interpretare interpretare este este ast ast zi zi cea cea acceptat acceptat , , diver diver i i autori autori
recunoscnd recunoscnd n n cadrul cadrul unui unui pas o pas o serie serie de de momente momente mai mai importante importante. .
Figura 4.4 Fazele mersului.
Mi Mi c c rile sincrone ale trunchiului rile sincrone ale trunchiului i extremit i extremit ilor ilor
superioare ajut superioare ajut balansarea balansarea i ritmul de i ritmul de naintare prin naintare prin
men men inerea centrului de greutate inerea centrului de greutate ntr ntr- -o pozi o pozi ie ie
convenabil convenabil . .
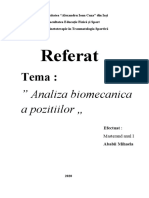
Kinemograma mersului. Kinemograma mersului. Grafic, mersul poate fi Grafic, mersul poate fi nregistrat nregistrat
cu ajutorul fotografiilor succesive. Interpretarea datelor pe cu ajutorul fotografiilor succesive. Interpretarea datelor pe
care le furnizeaz care le furnizeaz aceast aceast kinemograma este de mare kinemograma este de mare
interes pentru studiul mersului (fig. 4.7). interes pentru studiul mersului (fig. 4.7).
Figura 4.7 Kinemograma
mersului normal. SS' traiectoria
axei transversale a oldului; GG'
traiectoria axei transversale a
genunchiului; PP' traiectoria
axei transversale a gleznei.
Traiectoria Traiectoria oldului (SS') oldului (SS') prezint prezint dou dou oscila oscila ii verticale: una ii verticale: una n faza de sprijin n faza de sprijin i una i una n faza de pendulare. n faza de pendulare.
Curba este joas Curba este joas cnd cnd c c lciul a lciul atinge solul, se urc tinge solul, se urc treptat treptat n timp ce corpul roteaz n timp ce corpul roteaz pe genunchi pe genunchi i apoi pe i apoi pe
glezn glezn , pentru a atinge punctul , pentru a atinge punctul n care centrul de greutate este vertical pe n care centrul de greutate este vertical pe old, genunchi old, genunchi i glezn i glezn . De la . De la
acest punct, curba scade treptat. Arcul de cerc cu centrul acest punct, curba scade treptat. Arcul de cerc cu centrul n articula n articula ia gleznei se datoreaz ia gleznei se datoreaz faptului c faptului c oldul oldul
se men se men ine ine n extensie, iar genunchiul n extensie, iar genunchiul i glezna sunt fixate de tendonul ahilian; i glezna sunt fixate de tendonul ahilian; n felul acesta centrul de n felul acesta centrul de
rota rota ie se mut ie se mut de la glezn de la glezn nainte spre articula nainte spre articula iile metatarsofalangiene. Ac iile metatarsofalangiene. Aceast east schimbare a centrului de schimbare a centrului de
greutate are greutate are i scopul de a lungi extremitatea i scopul de a lungi extremitatea i se men i se men ine p ine pn n cnd cnd c c lciul membrului opus atinge solul, lciul membrului opus atinge solul,
ncepnd astfel faza de sprijin dublu. Cnd ncepnd astfel faza de sprijin dublu. Cnd ncepe faza de pendulare, curba ncepe faza de pendulare, curba oldului se ridic oldului se ridic din nou treptat, din nou treptat,
corpul fiind ridicat de membrul opus; de aceast corpul fiind ridicat de membrul opus; de aceast dat dat , arcul de cerc este mai lin. , arcul de cerc este mai lin.
Urm Urm rind rind traiectoria genunchiului (GG'), traiectoria genunchiului (GG'), c cnd nd c c lciul atinge solul, genunchiul este lciul atinge solul, genunchiul este n extensie. n extensie. Curba Curba
coboar coboar u u or din momentul or din momentul n care piciorul se preg n care piciorul se preg te te te s te s p p r r seasc seasc solul. Genunchiul trece solul. Genunchiul trece n flexie, n flexie,
gamba se roteaz gamba se roteaz u u or or n afar n afar i piciorul se extinde pu i piciorul se extinde pu in, ceea ce atrage o urcare a curbei. Cnd piciorul se in, ceea ce atrage o urcare a curbei. Cnd piciorul se
a a terne pe sol, traiectoria continu terne pe sol, traiectoria continu s s urce lent, genunchiul fiind acum flectat la 15 urce lent, genunchiul fiind acum flectat la 15 fa fa de perpendicular de perpendicular . .
Din acest punct traiectoria Din acest punct traiectoria ncepe s ncepe s coboare, dar mai neregulat dect la urcare deoarece centrul de r coboare, dar mai neregulat dect la urcare deoarece centrul de rota ota ie s ie s- -
a mutat pe articula a mutat pe articula iile metatarsofalangiene, glezna fiind fixat iile metatarsofalangiene, glezna fiind fixat de tendonul ahilian. de tendonul ahilian. Astfel se efectueaz Astfel se efectueaz i i
alungirea relativ alungirea relativ a membrului. a membrului. C Cnd nd piciorul p piciorul p r r se se te solul pentru a intra te solul pentru a intra n faza de pendu n faza de pendu lare, lare, ncepe ncepe
flexia coapsei flexia coapsei i curba merge repede i curba merge repede n sus, pentru a atinge maximul cnd coapsa este n sus, pentru a atinge maximul cnd coapsa este n flexie total n flexie total , iar , iar
genunchiul genunchiul n flexie de 40 n flexie de 40 . Curba cade apoi brusc cnd genunchiul este . Curba cade apoi brusc cnd genunchiul este ntins, c ntins, c lciul atinge solul lciul atinge solul i i ncepe ncepe
faza de dublu sprijin. Ac faza de dublu sprijin. Aceast east c c dere este rezultatul trecerii dere este rezultatul trecerii ntregii greut ntregii greut i corporale asupra membrului i corporale asupra membrului
inferior. inferior.
Traiectoria articula Traiectoria articula iei gleznei (PP') iei gleznei (PP') este pu este pu in mai complicat in mai complicat . Ea merge . Ea merge nainte nainte i i n jos, c n jos, cnd nd
c c lciul atinge solul lciul atinge solul i piciorul se a i piciorul se a az az pe sol, dar r pe sol, dar r mne mne la acest nivel, deoarece extremitatea roteaz la acest nivel, deoarece extremitatea roteaz
deasupra gleznei deasupra gleznei i centrul de rota i centrul de rota ie se mut ie se mut nainte pe articula nainte pe articula iile metatarsofalangiene. C iile metatarsofalangiene. Cnd aceast nd aceast
deplasare s deplasare s- -a efectuat a efectuat i piciorul p i piciorul p e e te solul, curba se ridic te solul, curba se ridic rapid, pentru a cobor rapid, pentru a cobor apoi, dup apoi, dup ce genunchiul ce genunchiul
a atins maximul eficient de flexie a atins maximul eficient de flexie i coapsa a i coapsa a nceput s nceput s se flecteze. se flecteze. Din acest punct, curba coboar Din acest punct, curba coboar cu att cu att
mai mult cu ct mai mult cu ct genunchiul se extinde; coboar genunchiul se extinde; coboar lin p lin pn n cnd cnd este atins este atins extensia maxim extensia maxim , apoi coboar , apoi coboar
brusc p brusc pn n cnd cnd c c lciul atinge solul. lciul atinge solul.
Mersul la deficien
Mersul la deficien
ii locomotori
ii locomotori
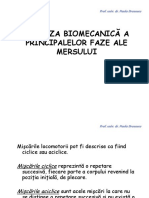
Condi Condi iile minime pentru mers. iile minime pentru mers. Mersul r Mersul r mne posibil mne posibil
chiar chiar n cadrul unor deficien n cadrul unor deficien e musculare grave. Pentru e musculare grave. Pentru
aceasta mecanismele de deplasare se modific aceasta mecanismele de deplasare se modific att att
segmentar, ct segmentar, ct i i n totalitate, folosindu n totalitate, folosindu- -se la maximum se la maximum
for for ele musculare restante ele musculare restante i apel i apelndu ndu- -se la se la
mecanismele de stabilizare pasiv mecanismele de stabilizare pasiv (fig. 4.8). (fig. 4.8).
Fiind complex Fiind complex , locomo , locomo ia uman ia uman g g se se te aproape te aproape
totdeauna posibilit totdeauna posibilit ile cele mai economice de adaptare ile cele mai economice de adaptare
la situa la situa iile cele mai dificile. La iile cele mai dificile. La aceasta contribuie faptul aceasta contribuie faptul
c c mersul pretinde o utilizare minim mersul pretinde o utilizare minim de for de for i, odat i, odat
mi mi carea carea nceput nceput , continuitatea ei intr , continuitatea ei intr sub dependen sub dependen a a
for for elor exterioare, elor exterioare, n special a iner n special a iner iei. iei. naint naint rile rile
succesive ale membrelor inferioare pot s succesive ale membrelor inferioare pot s ajung ajung astfel astfel
s s ac ac ioneze ca dou ioneze ca dou pendule care lucreaz pendule care lucreaz n contra n contra
timp. timp.
Figura 4.8 Mecanismul de
stabilizare pasiv a membrului
inferior n mers, prin punerea sub
tensiune a ligamentului Bertin-
Bigelow (1) i a capsulei i
ligamentelor posterioare ale
genunchiului (2).
Totu Totu i, posibilit i, posibilit ile de mers ale bolnavilor cu deficien ile de mers ale bolnavilor cu deficien e musculare r e musculare r mn legate de o serie mn legate de o serie
de condi de condi ii minime din partea grupelor musculare. Aceste condi ii minime din partea grupelor musculare. Aceste condi ii pot fi redate sumar ii pot fi redate sumar n felul n felul
urm urm tor: tor:
se poate umbla f se poate umbla f r r baston sau crje, baston sau crje, cu paralizie total cu paralizie total a unui membru inferior (cu a unui membru inferior (cu
excep excep ia marelui fesier sau a psoasului, care trebuie s ia marelui fesier sau a psoasului, care trebuie s fie cel pu fie cel pu in par in par ial func ial func ionali), cu ionali), cu
condi condi ia ca cel ia ca cel lalt membru s lalt membru s fie s fie s n n tos sau s tos sau s prezinte numai paralizie de cvadriceps prezinte numai paralizie de cvadriceps i i
de tibial anterior; de tibial anterior;
un baston este necesar cnd baza de sus un baston este necesar cnd baza de sus inere se reduce la o linie, inere se reduce la o linie, n cazul paraliziei n cazul paraliziei
celor doi mari fesieri, al paraliziei bicep celor doi mari fesieri, al paraliziei bicep ilor femurali, sau al paraliziei marelui fesier de o ilor femurali, sau al paraliziei marelui fesier de o
parte parte i al tricepsului sural de cealalt i al tricepsului sural de cealalt parte; parte;
este nevoie de dou este nevoie de dou bastoane bastoane n cazul paraliziei mu n cazul paraliziei mu chilor chilor oldului de ambele p oldului de ambele p r r i. i. n n
aceast aceast situa situa ie, bolnavul proiecteaz ie, bolnavul proiecteaz gambele gambele nainte printr nainte printr- -o mi o mi care de torsiune a care de torsiune a
trunchiului trunchiului i trebuie s i trebuie s ia sprijin alternativ pe fiecare baston; ia sprijin alternativ pe fiecare baston;
se poate umbla cu dou se poate umbla cu dou crje, crje, avnd m avnd membrele superioare s embrele superioare s n n toase, chiar toase, chiar n cazul n cazul
unei paralizii totale a membrelor inferioare, dar cu conservare unei paralizii totale a membrelor inferioare, dar cu conservarea relativ a relativ a mu a mu chilor chilor
abdominali sau cu paralizia flancului de o parte abdominali sau cu paralizia flancului de o parte i conservarea mu i conservarea mu chilor chilor oldului de oldului de
aceea aceea i parte. i parte.
Isaac Newton a descoperit trei legi de mi Isaac Newton a descoperit trei legi de mi care prin care este captat care prin care este captat esen esen a mi a mi c c rii corpurilor, rii corpurilor,
incluznd incluznd i corpul uman. i corpul uman. Una dintre ele, cea de Una dintre ele, cea de- -a treia spune c a treia spune c ac ac iunea iunea i reac i reac iunea sunt egale dar de semne iunea sunt egale dar de semne
contrare. Da contrare. Dac c membrele superioare ale corpului uman sunt ridicate, for membrele superioare ale corpului uman sunt ridicate, for a muscular a muscular necesar necesar realiz realiz rii acestei rii acestei
mi mi c c ri este egal ri este egal dar de semn contrar cu reac dar de semn contrar cu reac iunea de iunea de mpingere a corpului uman, ce ia na mpingere a corpului uman, ce ia na tere la contactul t tere la contactul t lpii lpii
cu solul. cu solul.
Dac Dac aceast aceast mi mi care este realizat care este realizat pe un c pe un c ntar, atunci se poate observa cum greutatea indicat ntar, atunci se poate observa cum greutatea indicat scade scade
sau cre sau cre te. M te. Motivul realiz otivul realiz rii acestei varia rii acestei varia ii este acela c ii este acela c instrumentul de m instrumentul de m sur sur a greut a greut ii reprezint ii reprezint un traductor un traductor
de for de for care m care m soar soar reac reac iunea iunea n timpul contactului cu solul. Pe baza acestui aspect, n timpul contactului cu solul. Pe baza acestui aspect, n antichitate, grecii n antichitate, grecii tiau tiau
despre efectul ridic despre efectul ridic rii rii i coborrii membrelor superioare, fapt pentru care ei utilizau b i coborrii membrelor superioare, fapt pentru care ei utilizau buc uc i de piatr i de piatr , a , a a zisele a zisele
haltere, cu care ace haltere, cu care ace tia realizau exerci tia realizau exerci ii fizice ii fizice n vederea cre n vederea cre terii for terii for ei musculare. ei musculare. De asemenea odat De asemenea odat ce luaser ce luaser
la cuno la cuno tiin tiin despre acest efect, ace despre acest efect, ace tia au profitat de el, aplicndu tia au profitat de el, aplicndu- -l l i la alte exerci i la alte exerci ii fizice care solicitau ii fizice care solicitau
membrele inferioare ob membrele inferioare ob innd a innd astfel alerg stfel alerg ri mai rapide ri mai rapide i s i s rituri mai lungi. rituri mai lungi.
Punctul cheie al s Punctul cheie al s riturii corpului uman const riturii corpului uman const n modificarea accelera n modificarea accelera iei acestuia, de fapt corpul uman iei acestuia, de fapt corpul uman
poate ridica membrele superioare cu valori de accelerare diverse poate ridica membrele superioare cu valori de accelerare diverse n vederea satisfacerii mi n vederea satisfacerii mi c c rii de s rii de s ritur ritur . .
Mi Mi carea de s carea de s ritur ritur este posibil este posibil n practic n practic prin pierderea contactului cu solul ridicnd membrele prin pierderea contactului cu solul ridicnd membrele
superioare cu o anumit superioare cu o anumit accelera accelera ie (figura 4.10). ie (figura 4.10).
4.2. Biomecanica micrii de sritur
Figura 4.10. Micarea de sritur
realizat numai prin utilizarea
membrelor superioare
Aceast Aceast strategie necesit strategie necesit p p strarea strarea ntregului corp uman ca un rigid ntregului corp uman ca un rigid n timpul acceler n timpul acceler rii rii i i
deceler deceler rii riguroase ale membrelor superioare rii riguroase ale membrelor superioare n vederea realiz n vederea realiz rii elanului. rii elanului.
De fapt acest fenomen este interpretabil De fapt acest fenomen este interpretabil n figura 4 n figura 4.10, .10, atunci cnd co atunci cnd corpul uman trebuie rpul uman trebuie
s s se ridice se ridice n pozi n pozi ie biped ie biped din pozi din pozi ia ce solicit ia ce solicit flexia genunchilor. Prin utilizarea membrelor flexia genunchilor. Prin utilizarea membrelor
superioare superioare n vederea schimb n vederea schimb rii pozi rii pozi iei, aceasta constituie o strategie, deoarece masa iei, aceasta constituie o strategie, deoarece masa
membrelor superioare este relativ mic membrelor superioare este relativ mic n compara n compara ie cu masa corpului uman. Dar pornind de ie cu masa corpului uman. Dar pornind de
la rela la rela ia c ia c , for , for a dezvoltat a dezvoltat la nivelul umerilor poate fi amplificat la nivelul umerilor poate fi amplificat numai dac numai dac membrele membrele
superioare sunt ridicate cu o accelera superioare sunt ridicate cu o accelera ie m ie m rit rit . A . Astfel dac stfel dac accelera accelera ia acestora nu ar fi ia acestora nu ar fi
suficient de mare, atunci musculatura umerilor nu poate contribu suficient de mare, atunci musculatura umerilor nu poate contribui la dezvoltarea efectului i la dezvoltarea efectului
necesar ridic necesar ridic rii rii n pozi n pozi ie biped ie biped . .
For For a necesar a necesar deplas deplas rii centrului de greutate a corpului uman rii centrului de greutate a corpului uman n momentul schimb n momentul schimb rii rii
pozi pozi iei (din cea cu genunchii flexa iei (din cea cu genunchii flexa i la pozi i la pozi ia biped ia biped ), ), este dat este dat de rela de rela ia: ia:
=
=
=
=
=
n i
i
n i
i
i i CM CM
ds F ds F
1 1
Unde Unde: :
FCM FCM reprezint reprezint for for a necesar a necesar deplas deplas rii centrului de greutate al corpului uman. rii centrului de greutate al corpului uman.
dsCM dsCM reprezint reprezint derivata deplas derivata deplas rii centrului de greutate al corpului uman pe vertical rii centrului de greutate al corpului uman pe vertical n timpul s n timpul s riturii. riturii.
Fi Fi reprezint reprezint for for a dezvoltat a dezvoltat de de i i mu mu chi ai membrului superior. chi ai membrului superior.
Odat Odat ce mu ce mu chii contribuie la generarea unui moment pe o articula chii contribuie la generarea unui moment pe o articula ie, ecua ie, ecua ia (1 ia (1), ), mai poate fi scris mai poate fi scris : :
=
=
=
i
n i
i
i
d M muscular Efectul
1
unde: unde:
Mi Mi reprezint reprezint momentul dezvoltat la nivelul unui mu momentul dezvoltat la nivelul unui mu chi sau grupe musculare. chi sau grupe musculare.
i i reprezint reprezint deplasare unghiular deplasare unghiular a bra a bra ului asupra c ului asupra c ruia ac ruia ac ioneaz ioneaz momentul Mi. momentul Mi.
Rela Rela iile (1) iile (1) i (2) sunt echivalente de i (2) sunt echivalente de ndat ndat ce sunt exprimate ce sunt exprimate n acelea n acelea i unit i unit i de m i de m sur sur . .
Pe baza cre Pe baza cre rii acestui rii acestui
proces, se desprinde contribu proces, se desprinde contribu ia ia
major major a membrelor superioare, a membrelor superioare,
fapt pentru care acest lucru fapt pentru care acest lucru
poate fi simulat cu ajutorul poate fi simulat cu ajutorul
calculatorului pe un model calculatorului pe un model
virtual simplificat al corpului virtual simplificat al corpului
uman uman n vederea studiului n vederea studiului
dinamic al mi dinamic al mi c c rii acestora. rii acestora.
Modelul virtual este creat Modelul virtual este creat
din dou din dou segmente rigide: segmente rigide:
primul este format din primul este format din
membrele inferioare, trunchi membrele inferioare, trunchi i i
cap; cap;
al doilea este format din cele al doilea este format din cele
dou dou membre superioare, a membre superioare, a a a
cum se poate observa cum se poate observa n figura n figura
4.11. 4.11.
Figura 4.11. Contribuia membrelor
superioare n vederea generrii
forelor pentru realizarea sriturii
Cel de Cel de- -al doilea segment permite realizarea mi al doilea segment permite realizarea mi c c rii de rota rii de rota ie echivalente ie echivalente
articula articula iei de la nivelul um iei de la nivelul um rului, aceast rului, aceast mi mi care fiind generat care fiind generat pe baza unui pe baza unui
moment M considerat constant. moment M considerat constant.
Modelul virtual se afl Modelul virtual se afl n pozi n pozi ie ini ie ini ial ial biped biped , sta , sta ionar, ionar, i membrele i membrele
superioare coborte pe ln superioare coborte pe lng g corp. corp. n acest context au fost utilizate dou n acest context au fost utilizate dou versiuni de versiuni de
modele virtuale, unul cu membrele superioare considerate rigide, modele virtuale, unul cu membrele superioare considerate rigide, iar cel iar cel lalt cu lalt cu
membrele superioare ce permit flexia de la nivelul articula membrele superioare ce permit flexia de la nivelul articula iei cotului. iei cotului.
Efectul muscular a fost creat prin intermediul mu Efectul muscular a fost creat prin intermediul mu chilor flexori de la nivelul chilor flexori de la nivelul
um um rului, iar membrele inferioare au fost considerate rului, iar membrele inferioare au fost considerate n contact cu solul. n contact cu solul.
Prin simularea s Prin simularea s riturii, modelul virtual a fost studiat riturii, modelul virtual a fost studiat ncepnd de la pierderea ncepnd de la pierderea
contactului cu solul al membrelor inferioare, cele superioare ce contactului cu solul al membrelor inferioare, cele superioare ce erau erau ntinse, au fost ntinse, au fost
flexate producndu flexate producndu- -se energii cinetice de valori 527,5 J se energii cinetice de valori 527,5 J n primul caz n primul caz i i n al doilea n al doilea
515,3J. Fiecare valoare a acestei energii cinetice a fost distri 515,3J. Fiecare valoare a acestei energii cinetice a fost distribuit buit n scopul m n scopul m ririi ririi
energiei poten energiei poten iale pentru deplasarea centrului de greutate al sistemului. iale pentru deplasarea centrului de greutate al sistemului.
Simularea a fost utilizat Simularea a fost utilizat n vederea studierii procesului de s n vederea studierii procesului de s ritur ritur ob ob inndu inndu- -
se astfel dou se astfel dou variante: variante:
prima variant prima variant , cu membrele superioare rigide; , cu membrele superioare rigide;
a doua variant a doua variant cu posibilitatea flex cu posibilitatea flex rii acestora de la nivelul articula rii acestora de la nivelul articula iei cotului; iei cotului;
Prin balansarea membrelor superioare, Prin balansarea membrelor superioare, n cazul primei variante, este generat n cazul primei variante, este generat o o
for for ce ac ce ac ioneaz ioneaz pe direc pe direc ie vertical ie vertical mai mare dect for mai mare dect for a generat a generat prin greutatea prin greutatea
modelului virtual al corpului uman pentru o perioad modelului virtual al corpului uman pentru o perioad de timp mult mai mare dect de timp mult mai mare dect n n
cazul celei de cazul celei de- -a doua variante. a doua variante.
Zona aflat Zona aflat sub curba for sub curba for ei ce ei ce
ac ac ioneaz ioneaz pe vertical pe vertical , ,
variabil variabil n timp, pentru n timp, pentru
fiecare variant fiecare variant , reprezint , reprezint
impulsul mecanic , ce este impulsul mecanic , ce este
responsabil de schimb responsabil de schimb rile pe rile pe
direc direc ie vertical ie vertical ale ale
momentului sistemului virtual. momentului sistemului virtual.
A A a cum se observ a cum se observ i pe i pe
diagram diagram , varia , varia ia acestor ia acestor
for for e este diferit e este diferit pentru pentru
ambele variante, fapt pentru ambele variante, fapt pentru
care desprinderea modelului care desprinderea modelului
virtual prin pierderea virtual prin pierderea
contactului dintre sol contactului dintre sol i i
membre inferioare, se membre inferioare, se
realizeaz realizeaz la diferite viteze ale la diferite viteze ale
centrului de greutate al centrului de greutate al
modelelor virtuale. modelelor virtuale.
Profilele acestor viteze Profilele acestor viteze
descompuse pe direc descompuse pe direc ie ie
vertical vertical vV, respectiv vV, respectiv
orizontal orizontal vH sunt expuse vH sunt expuse n n
figura 4.12. figura 4.12.
Figura 4.12. Diagrama de variaie a
profilelor vitezelor n timpul
sriturii.
Concluzia moajor Concluzia moajor desprins desprins n urma studierii n urma studierii
acestei varia acestei varia ii este aceea c ii este aceea c , componenta vitezei pe direc , componenta vitezei pe direc ie ie
vertical vertical pentru varianta cu membrele superioare considerate pentru varianta cu membrele superioare considerate
rigide este mai mare dect cea din varianta cu posibilitatea rigide este mai mare dect cea din varianta cu posibilitatea
flex flex rii acestora de la nivelul articula rii acestora de la nivelul articula iei cotului vVBnt. iei cotului vVBnt.
Motivul este acela c Motivul este acela c varia varia ia componentei for ia componentei for ei pe ei pe
vertical vertical are valori constante atunci cnd are valori constante atunci cnd membrele inferioare membrele inferioare
intr intr n contact cu solul, deoarece for n contact cu solul, deoarece for a gravita a gravita ional ional amplific amplific
efectul coborrii modelului pe sol, reducnd viteza centrului de efectul coborrii modelului pe sol, reducnd viteza centrului de
greutate pe vertical greutate pe vertical . .
Practic aliura acestor curbe ale componentelor Practic aliura acestor curbe ale componentelor
for for elor pe vertical elor pe vertical pentru cele dou pentru cele dou variante este identic variante este identic , ,
numai c numai c viteza este diferit viteza este diferit . .
De asemenea pe aceast De asemenea pe aceast diagram diagram sunt sunt
reprezentate reprezentate i cele dou i cele dou componente orizontale care au componente orizontale care au
aceea aceea i aliur i aliur , dar valori diferite. , dar valori diferite. Motivul fiind acela c Motivul fiind acela c atunci atunci
cnd segmentul bra cnd segmentul bra ului se ridic ului se ridic , centrul de greutate al , centrul de greutate al
acestuia posed acestuia posed o component o component orizontal orizontal a mi a mi c c rii rii
suplimentar suplimentar fa fa de cea vertical de cea vertical . .
La La nceputul balans nceputul balans rii bra rii bra ului ia na ului ia na tere o tere o
reac reac iune ce iune ce ncearc ncearc s s roteasc roteasc restul corpului restul corpului n sens invers n sens invers
sensului de rota sensului de rota ie orar. Componenta for ie orar. Componenta for ei pe orizontal ei pe orizontal este este
atunci negativ atunci negativ , ceea ce explic , ceea ce explic faptul c faptul c for for ele de frecare ce ele de frecare ce
apar apar ntre t ntre t lpile membrelor inferioare este suficient de mare lpile membrelor inferioare este suficient de mare
pentru a pentru a mpiedica alunecarea acestora spre mpiedica alunecarea acestora spre nainte, nainte,
producndu producndu- -se astfel mi se astfel mi carea de s carea de s ritur ritur . .
Aceast Aceast simulare este considerat simulare este considerat ca fiind mai mult ca fiind mai mult
o s o s ritur ritur generat generat numai cu ajutorul membrelor superioare, numai cu ajutorul membrelor superioare,
dar aceasta reprezint dar aceasta reprezint unele dintre segmentele care contribuie unele dintre segmentele care contribuie
la realizarea major la realizarea major a elanului. a elanului. De asemenea dac De asemenea dac s s- -ar realiza o ar realiza o
simulare a s simulare a s riturii prin care s riturii prin care s se ia se ia n considerare toate n considerare toate
articula articula iile corpului uman, atunci deplasarea centrului de iile corpului uman, atunci deplasarea centrului de
greutate al acestuia ar fi una cobinat greutate al acestuia ar fi una cobinat att pe direc att pe direc ie vertical ie vertical
ct ct i pe orizontal i pe orizontal . .
Atle Atle ii utilizeaz ii utilizeaz diferite moduri de realizare a unei diferite moduri de realizare a unei
s s rituri a rituri a a cum se poate observa a cum se poate observa i i n figura 4 13 n figura 4 13
Figura 4.13. Realizarea micrii
de sritur de ctre atlei
Uneori este dificil de apreciat ce efect este generat asupra Uneori este dificil de apreciat ce efect este generat asupra
corpului uman, prin generarea vitezelor membrelor superioare, ia corpului uman, prin generarea vitezelor membrelor superioare, iar r
momentul necesar realiz momentul necesar realiz rii s rii s riturii poate avea diferite valori fiind riturii poate avea diferite valori fiind
influen influen at de parametrii dimensionali ai corpului uman, de timpul de at de parametrii dimensionali ai corpului uman, de timpul de
reac reac ie, etc., acesta nefiind ie, etc., acesta nefiind ntotdeauna constant. ntotdeauna constant.
Teoretic acesta poate fi considerat ca fiind dat de rela Teoretic acesta poate fi considerat ca fiind dat de rela iile: iile:
Momentul = mpicioare x vpicioare = mntregului corp x vntregului corp
vntregului corp = vpicioare x [mpicioare/ mntregului corp]
Dac Dac valoarea numeric valoarea numeric a raportului din a raportului din
parantezele drepte este mai mic parantezele drepte este mai mic dect 1, viteza dect 1, viteza ntregului ntregului
corp va fi mai mic corp va fi mai mic dect viteza membrelor inferioare. dect viteza membrelor inferioare.
Aceea Aceea i ecua i ecua ie ar fi valabil ie ar fi valabil i i n contextul exemplului din n contextul exemplului din
figura figura 4 4.1, .1, ceea ce arat ceea ce arat c c oprirea din mi oprirea din mi care a bra care a bra elor elor
fa fa de restul corpului uman, contribuie la sc de restul corpului uman, contribuie la sc derea vitezei derea vitezei
unghiulare a unghiulare a ntregului corp uman. ntregului corp uman.
Ori de cte ori, vectorul for Ori de cte ori, vectorul for ei verticale trece prin ei verticale trece prin
centrul de greutate, are loc o transla centrul de greutate, are loc o transla ie pur ie pur a a ntregului ntregului
corp. Da corp. Dac c acest vector nu trece prin acest centru, ia acest vector nu trece prin acest centru, ia
na na tere o accelera tere o accelera ie unghiular ie unghiular , a , a ntregului corp ce ntregului corp ce l l
nclin nclin fa fa de acest vector a de acest vector a a cum se observ a cum se observ n figura n figura
4.14. 4.14.
n figura 4.14, n figura 4.14, I I reprezint reprezint momentul de momentul de
iner iner ie generat de segmentele corpului uman, acesta fiind ie generat de segmentele corpului uman, acesta fiind
rota rota ional, echivalent cu masa ional, echivalent cu masa ntregului corp, iar ntregului corp, iar d d
reprezint reprezint perpendiculara pe vectorul for perpendiculara pe vectorul for ei dus ei dus din centrul din centrul
de greutate al corpului uman. de greutate al corpului uman.
Accelera Accelera ia gravita ia gravita ional ional este neglijat este neglijat n acest n acest
caz, caz, n vederea simplific n vederea simplific rii modelului, dar pentru realizarea rii modelului, dar pentru realizarea
unei analize mecanice complete unei analize mecanice complete i corecte, aceasta trebuie i corecte, aceasta trebuie
s s fie luat fie luat n considerare. n considerare.
n figura 4.14, n figura 4.14, I I reprezint reprezint momentul de iner momentul de iner ie generat ie generat
de segmentele corpului uman, acesta fiind rota de segmentele corpului uman, acesta fiind rota ional, ional,
echivalent cu masa echivalent cu masa ntregului corp, iar ntregului corp, iar d d reprezint reprezint
perpendiculara pe vectorul for perpendiculara pe vectorul for ei dus ei dus din centrul de din centrul de
greutate al corpului uman. greutate al corpului uman.
Accelera Accelera ia gravita ia gravita ional ional este neglijat este neglijat n acest n acest
caz, caz, n vederea simplific n vederea simplific rii modelului, dar pentru realizarea rii modelului, dar pentru realizarea
unei analize mecanice complete unei analize mecanice complete i corecte, aceasta trebuie i corecte, aceasta trebuie
s s fie luat fie luat n considerare. n considerare.
Figura 4.14. Micarea segmental
determin direcia vectorului for
generat la contactul tlpii cu solul i
efectul acestuia asupra poziiei
centrului de greutate
4.3. Biomecanica micrii de balans i a meninerii echilibrului
n cazul n cazul n care se consider n care se consider
corpul uman ce urmeaz corpul uman ce urmeaz s s p p easc easc
pe o suprafa pe o suprafa ngust ngust , (figura 4.15), , (figura 4.15),
atunci ob atunci ob inerea echilibrului corpului inerea echilibrului corpului
uman se face prin dezvoltarea unor uman se face prin dezvoltarea unor
momente unghiulare la nivelul momente unghiulare la nivelul
articula articula iei um iei um rului, rului, n vederea n vederea
men men inerii acestuia inerii acestuia n pozi n pozi ie biped ie biped
pe tot parcursul deplas pe tot parcursul deplas rii suprafe rii suprafe ei ei
nguste. nguste.
Figura. 4.15. Aspectul
meninerii echilibrului corpului
uman
Cre Cre terea momentului unghiular nu poate fi contracarat terea momentului unghiular nu poate fi contracarat
dac dac corpul uman men corpul uman men ine o configura ine o configura ie fix ie fix a elementelor a elementelor
componente din structura acestuia, a componente din structura acestuia, a a cum este prezentat a cum este prezentat
n figura 4.16. n figura 4.16.
Singura cale prin care corpul uman Singura cale prin care corpul uman i poate men i poate men ine ine
pozi pozi ia de echilibru ia de echilibru mpotriva c mpotriva c derii acestuia, este aceea derii acestuia, este aceea
realizat realizat prin transferul momentului unghiular asupra prin transferul momentului unghiular asupra
anumitor segmente ale acestuia. Du anumitor segmente ale acestuia. Dup p cum se cum se tie, corpul tie, corpul
uman este uman este mp mp r r it it n segmente, iar rigidizarea acestora n segmente, iar rigidizarea acestora
poate fi echivalat poate fi echivalat , pentru men , pentru men inerea echilibrului, cu un inerea echilibrului, cu un
cilindru cilindru i un disc, aceast i un disc, aceast echivalare depinznd de echivalare depinznd de
arhitectura mi arhitectura mi c c rilor realizate de aceste segmente rilor realizate de aceste segmente n n
timpul men timpul men inerii echilibrului (figura 4.17). inerii echilibrului (figura 4.17).
Figura 4.17. Echivalarea
corpului uman cu modele
geometrice rezultate n baza
micrii de meninere a
echilibrului
Figura 4.16. Interpretarea
meninerii echilibrului n
vederea pstrrii poziiei
bipede a corpului uman
n figura 4.17, este prezentat conceptul simplificat al corpului n figura 4.17, este prezentat conceptul simplificat al corpului uman, uman,
n timpul men n timpul men inerii echilibrului. inerii echilibrului. n cele dou n cele dou pozi pozi ii a ii a i b, coprul i b, coprul
uman se rote uman se rote te te n jurul axei verticale cu o vitez n jurul axei verticale cu o vitez unghiular unghiular notat notat
cu cu B. Bra B. Bra ele se rotesc cu o vitez ele se rotesc cu o vitez unghiular unghiular A, aceasta fiind A, aceasta fiind
considerat considerat c c ac ac ioneaz ioneaz n plan frontal, avnd sensul de orientare n plan frontal, avnd sensul de orientare
echivalent cu sensul orar. echivalent cu sensul orar.
n pozi n pozi ia b, este realizat ia b, este realizat acea acea i mi i mi care a bra care a bra elor, dar elor, dar
aceasta nu poate fi considerat aceasta nu poate fi considerat circular circular datorit datorit restric restric iilor impuse iilor impuse
de articula de articula ia um ia um rului. Momentul unghiular total instantaneu notat rului. Momentul unghiular total instantaneu notat
cu AM, a sistemului ciclindru cu AM, a sistemului ciclindru disc, fa disc, fa de planul pe care corpul de planul pe care corpul
uman p uman p e e te, este dat de rela te, este dat de rela ia: ia:
unde: unde:
IB IB reprezint reprezint momentul de iner momentul de iner ie pentru corpul uman considerat f ie pentru corpul uman considerat f r r
membrele superioare; membrele superioare;
IA IA reprezint reprezint momentul de iner momentul de iner ie al membrelor superioare; ie al membrelor superioare;
mB mB reprezint reprezint masa corpului uman considerat f masa corpului uman considerat f r r membrele membrele
superioare; superioare;
mA mA reprezint reprezint masa membrelor superioare; masa membrelor superioare;
r1, r2 r1, r2 reprezint reprezint cotele cotele n func n func ie de care este identificat ie de care este identificat pozi pozi ia ia
centrului de greutate. centrului de greutate.
( ) [ ]
A A B A B B
I r r m r m I AM + + + + =
2
2 1
2
1
Dac Dac viteza unghiular viteza unghiular a membrelor superioare cre a membrelor superioare cre te treptat, p te treptat, pn n ce ce
momentul unghiular dezvoltat la nivelul articula momentul unghiular dezvoltat la nivelul articula iei um iei um rului va fi egal cu rului va fi egal cu
momentul unghiular total instantaneu, atunci momentul unghiular momentul unghiular total instantaneu, atunci momentul unghiular
dezvoltat la baza coprului uman va fi egal cu 0. dezvoltat la baza coprului uman va fi egal cu 0.
n cazul n cazul n care se dezvolt n care se dezvolt un moment unghiular la nivelul bra un moment unghiular la nivelul bra elor, elor,
atunci momentele unghiulare ale elementelor din structura corpul atunci momentele unghiulare ale elementelor din structura corpului uman ui uman
sunt egale cu 0, i sunt egale cu 0, iar corpul uman r ar corpul uman r mne mne n pozi n pozi ie biped ie biped sta sta ionar ionar . .
Un exemplu al acestui aspect este redat Un exemplu al acestui aspect este redat n figura 4.18, unde bra n figura 4.18, unde bra ele ele
sunt utilizate sunt utilizate n vederea trecerii coprului uman din pozi n vederea trecerii coprului uman din pozi ia a ia a n pozi n pozi ia b. ia b.
Figura 4.18. Transferul
momentelor unghiulare
dezvoltate la nivelul
articulaiilor coprului uman la
membrele superioare
Concluzia men Concluzia men inerii echilibtrului corpului uman inerii echilibtrului corpului uman n n
pozi pozi ie biped ie biped depinde de rotirea bra depinde de rotirea bra elor la nivelul elor la nivelul
articula articula iei um iei um rului. Du rului. Dup p cum se observ cum se observ , bra , bra ele sunt ele sunt
cele mai bune elemente cele mai bune elemente n vederea men n vederea men inerii inerii
echilibrului corpului uman. echilibrului corpului uman.
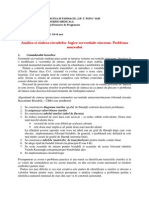
n figura 4 n figura 4.19, .19, este prezentat este prezentat o simulare o simulare
virtual virtual a echilibrului corpului uman prin considerarea a echilibrului corpului uman prin considerarea
acestuia ca fiind format din dou acestuia ca fiind format din dou segmente. segmente.
Segmentul superior este cel echivalent tuturor Segmentul superior este cel echivalent tuturor
elementelor componente ce intr elementelor componente ce intr n structura corpului n structura corpului
uman de deasupra articula uman de deasupra articula iei iei oldului. oldului.
Segmentul inferior echivaleaz Segmentul inferior echivaleaz membrele membrele
inferioare, acestea fiind considerate elemente rigide. inferioare, acestea fiind considerate elemente rigide.
A A adar, cele dou adar, cele dou segmente sunt legate segmente sunt legate ntre ele ntre ele
printr printr- -o articula o articula ie echivalent ie echivalent cu cea de la nivelul cu cea de la nivelul
oldului, iar mu oldului, iar mu chii flexori ce ac chii flexori ce ac ioneaz ioneaz asupra acestei asupra acestei
articula articula ii sunt responsabili de orientarea relativ ii sunt responsabili de orientarea relativ a celor a celor
dou dou segmente segmente n timpul simul n timpul simul rii echilibrului. rii echilibrului. n pozi n pozi ie ie
ini ini ial ial , c , cnd timpul t= nd timpul t= 0, 0, corpul uman se afl corpul uman se afl nclinat nclinat
nainte sub un unghi de 88 nainte sub un unghi de 88 , fa , fa de axa vertical de axa vertical i este i este
sta sta ionar. Axa ionar. Axa vertical vertical pe care se afl pe care se afl centrul de centrul de
greutate al corpului, trece prin centrul articula greutate al corpului, trece prin centrul articula iei iei
gleznei, comportamentul acesteia gleznei, comportamentul acesteia n timpul men n timpul men inerii inerii
echilibrului fiind descris de curba x. echilibrului fiind descris de curba x.
Dac Dac asupra articula asupra articula iei iei oldului se aplic oldului se aplic un un
moment de 250 Nm moment de 250 Nm, cele dou , cele dou segmente s segmente s- -ar ar
dezintegra dac dezintegra dac nu ar fi legate prin articula nu ar fi legate prin articula ia ia oldului, oldului,
fapt pentru care la nivelul acestei articula fapt pentru care la nivelul acestei articula ii viteza ii viteza
unghiular unghiular a celor dou a celor dou segmente se m segmente se m re re te te
propor propor ional cu momentul aplicat. ional cu momentul aplicat.
Figura 4.19. Simularea virtual
a meninerii echilibrului.
Das könnte Ihnen auch gefallen
- Fit Generation: Primul Manual De Fitness Din RomaniaVon EverandFit Generation: Primul Manual De Fitness Din RomaniaBewertung: 4 von 5 Sternen4/5 (8)
- Sunetul fizicii: Acustica fenomenologicăVon EverandSunetul fizicii: Acustica fenomenologicăBewertung: 4.5 von 5 Sternen4.5/5 (2)
- Evaluarea EchilibruluiDokument8 SeitenEvaluarea EchilibruluiFilip Ricarda100% (2)
- Bazele Fizice SL Anatomo-Functionale Ale MiscariiDokument8 SeitenBazele Fizice SL Anatomo-Functionale Ale MiscariiAlex LețNoch keine Bewertungen
- ScoliozeleDokument75 SeitenScoliozeleAlice Gabriela AliceNoch keine Bewertungen
- Curs Intructor Fitness - Anatomia PDFDokument72 SeitenCurs Intructor Fitness - Anatomia PDFCret Natasa100% (1)
- Miscarile CorpuluiDokument14 SeitenMiscarile Corpuluisimomy100% (3)
- Biomecanica Curs BuldusDokument50 SeitenBiomecanica Curs Buldusmezei_denisa100% (1)
- Carte MusculatieDokument308 SeitenCarte MusculatieGeorgiana NeculaiNoch keine Bewertungen
- Carte Biomecanica 2009Dokument180 SeitenCarte Biomecanica 2009Cosmin Daisa100% (1)
- Kinetologie CursDokument85 SeitenKinetologie CursRaluca DausNoch keine Bewertungen
- PedagogieDokument16 SeitenPedagogieRenata NicoletaNoch keine Bewertungen
- Aplicatii BiomecaniceDokument4 SeitenAplicatii Biomecanicedaniela921100% (3)
- Miscarile Aparatului Locomotor Ciclice Si AcicliceDokument14 SeitenMiscarile Aparatului Locomotor Ciclice Si AcicliceRashid MihaiNoch keine Bewertungen
- Bazele Kinetoterapiei-Balasa (Stefanescu) I. Ana-MariaDokument21 SeitenBazele Kinetoterapiei-Balasa (Stefanescu) I. Ana-MariaAna-maria StefanescuNoch keine Bewertungen
- BiofizicaDokument5 SeitenBiofizicaBalta NicoletaNoch keine Bewertungen
- Biomecanica MersuluiDokument34 SeitenBiomecanica MersuluiGabriel MichaelNoch keine Bewertungen
- Dinamica Corpului UmanDokument7 SeitenDinamica Corpului UmanThomasHardy14Noch keine Bewertungen
- Subiecte Examen GimnasticaDokument5 SeitenSubiecte Examen GimnasticaPasvantu DanielNoch keine Bewertungen
- Subiecte Rezolvate GimnasticaDokument23 SeitenSubiecte Rezolvate GimnasticaluizamgoNoch keine Bewertungen
- BA Curs Combinat PDFDokument63 SeitenBA Curs Combinat PDFgeambasiuroxana100% (1)
- Elemente de BiomecanicDokument22 SeitenElemente de BiomecanicVitali Fominov100% (1)
- Metode de Reeducare PosturalaDokument23 SeitenMetode de Reeducare PosturalaElena BeseleaNoch keine Bewertungen
- Parghii Şi Parghii OsoaseDokument18 SeitenParghii Şi Parghii OsoaseMaria Madalina100% (2)
- Metoda KLAPP PT Scolioze PDFDokument9 SeitenMetoda KLAPP PT Scolioze PDFPetronela PopNoch keine Bewertungen
- Curs 4 Terminologie 2Dokument18 SeitenCurs 4 Terminologie 2Rho MitzuNoch keine Bewertungen
- Biomecanica Aplicata - Mersul, Alergatul Si OrtostatismulDokument11 SeitenBiomecanica Aplicata - Mersul, Alergatul Si OrtostatismulRadu MehedintuNoch keine Bewertungen
- Universitatea Galati Biomecanica Referat 4Dokument6 SeitenUniversitatea Galati Biomecanica Referat 4daniel100% (1)
- Act. Mot. ComplexeDokument7 SeitenAct. Mot. ComplexeDragomir Lucian100% (1)
- Bazele Procedurale Ale Exercitiului FizicDokument23 SeitenBazele Procedurale Ale Exercitiului FizicFlorin DinuNoch keine Bewertungen
- Pregatire Examen BGADokument11 SeitenPregatire Examen BGAFlorinel OpreaNoch keine Bewertungen
- Mișcarea Umană - Traducere VladDokument3 SeitenMișcarea Umană - Traducere VladVlădu AdrianNoch keine Bewertungen
- Analiza MersuluiDokument41 SeitenAnaliza MersuluiGeorge100% (2)
- TEIBDokument101 SeitenTEIBgeambasiuroxanaNoch keine Bewertungen
- Referat 5Dokument8 SeitenReferat 5Adriana BîtlanNoch keine Bewertungen
- PROIECT BIOFIZICA MersulDokument9 SeitenPROIECT BIOFIZICA MersulAngelicaBlagociNoch keine Bewertungen
- Elemente de Statică. Echilibrul Solidului RigidDokument8 SeitenElemente de Statică. Echilibrul Solidului RigidTropical LeafNoch keine Bewertungen
- Referat BiomecanicDokument4 SeitenReferat BiomecanicMihaela Titei100% (3)
- Curs de Anatomie Funcţională Şi BiomecanicăDokument102 SeitenCurs de Anatomie Funcţională Şi BiomecanicăAna MariaNoch keine Bewertungen
- Discopatie LombarăDokument16 SeitenDiscopatie LombarăLaszlo Iloncai Aletta100% (2)
- Curs 01 Biomecanica AnII BFKTDokument46 SeitenCurs 01 Biomecanica AnII BFKTadrianaNoch keine Bewertungen
- C15 - Metoda VojtaDokument27 SeitenC15 - Metoda VojtaDaniela100% (7)
- Biomecanica Mersului Si A AlergariiDokument11 SeitenBiomecanica Mersului Si A AlergariiIoana Toma-Brianchon100% (3)
- Program de Exerciţii Dinamice Corective Si de Tonifiere KLAPPDokument8 SeitenProgram de Exerciţii Dinamice Corective Si de Tonifiere KLAPPTatiana ApostolescuNoch keine Bewertungen
- Para Pa RezaDokument4 SeitenPara Pa RezaAlin BetiucNoch keine Bewertungen
- Aquagym ProiectDokument13 SeitenAquagym ProiectTudorIza100% (1)
- Tipuri de Activitate MuscularaDokument5 SeitenTipuri de Activitate MuscularaCostea LeonardNoch keine Bewertungen
- Tehnici de ManeDokument7 SeitenTehnici de ManeMuscas AlexNoch keine Bewertungen
- Biomecanica MersuluiDokument17 SeitenBiomecanica MersuluiDana100% (3)
- Digori Vasile Biomecanica Analiza Biomecanică A MișcărilorDokument11 SeitenDigori Vasile Biomecanica Analiza Biomecanică A MișcărilorDigoi Vasile100% (1)
- 1.2. Bazele Fizice Si Procedurale Ale Exercitiului Fizic. Pozitia de StartDokument4 Seiten1.2. Bazele Fizice Si Procedurale Ale Exercitiului Fizic. Pozitia de StartGeorge Erdic100% (1)
- Kinetoterapie Analiza Pozitiilor FundamentaleDokument7 SeitenKinetoterapie Analiza Pozitiilor FundamentaleAnca Carmen NiculaiasaNoch keine Bewertungen
- Curs 2 Continut - 1Dokument32 SeitenCurs 2 Continut - 1MaRiONoch keine Bewertungen
- Clasificarea Deprinderilor MotriceDokument25 SeitenClasificarea Deprinderilor MotriceSerghei AdomnitaNoch keine Bewertungen
- Biomecanica Mersului PDFDokument32 SeitenBiomecanica Mersului PDFEmilia EmiliaNoch keine Bewertungen
- Curtea de JustitieDokument2 SeitenCurtea de JustitieAnna ApetriNoch keine Bewertungen
- Rotarix Oral Tube PIL 18.10.2016Dokument7 SeitenRotarix Oral Tube PIL 18.10.2016Andreea GeorgianaNoch keine Bewertungen
- Manual Utilizare KxxAH PDFDokument24 SeitenManual Utilizare KxxAH PDFAnna ApetriNoch keine Bewertungen
- Infanrix Hexa Epar Product Information - RoDokument40 SeitenInfanrix Hexa Epar Product Information - RoIonicaNoch keine Bewertungen
- Drept International PublicDokument34 SeitenDrept International PublicAnna ApetriNoch keine Bewertungen
- Dezvoltare Pe Luni 0 3 AniDokument5 SeitenDezvoltare Pe Luni 0 3 AniCalin MihailNoch keine Bewertungen
- Biomecanica GeneralaDokument105 SeitenBiomecanica GeneralaTanasa AlinNoch keine Bewertungen
- Boli NeuromusculareDokument40 SeitenBoli NeuromusculareAnna ApetriNoch keine Bewertungen
- Curentii de Joasa FrecventaDokument17 SeitenCurentii de Joasa FrecventaAnna ApetriNoch keine Bewertungen
- Boli NeuromusculareDokument40 SeitenBoli NeuromusculareAnna ApetriNoch keine Bewertungen
- 03 - Sem 4 - IS - PA - PCDokument2 Seiten03 - Sem 4 - IS - PA - PCAnna ApetriNoch keine Bewertungen
- Etapele Carierei Şi Vieţii ProfesionaleDokument11 SeitenEtapele Carierei Şi Vieţii ProfesionaleAnna Apetri100% (2)
- Teza DoctoratDokument50 SeitenTeza DoctoratAnna ApetriNoch keine Bewertungen
- Anatomie SNCDokument4 SeitenAnatomie SNCAnna Apetri100% (1)
- Biomateriale 1Dokument37 SeitenBiomateriale 1Anna Apetri100% (1)
- Referat de Laborator - Circuite Digitale - 5-6Dokument8 SeitenReferat de Laborator - Circuite Digitale - 5-6Anna Apetri100% (1)
- ComaDokument5 SeitenComaAnna ApetriNoch keine Bewertungen
- Cap1 CursDokument42 SeitenCap1 CursAnna ApetriNoch keine Bewertungen
- Curs 01 Biomecanica anII BIM anIIDokument19 SeitenCurs 01 Biomecanica anII BIM anIIAnna ApetriNoch keine Bewertungen
- Arsuri Curs 1+2Dokument56 SeitenArsuri Curs 1+2Anna ApetriNoch keine Bewertungen
- Pompa CECDokument17 SeitenPompa CECAnna ApetriNoch keine Bewertungen
- Pompa CECDokument17 SeitenPompa CECAnna ApetriNoch keine Bewertungen
- Etapele Carierei Şi Vieţii ProfesionaleDokument11 SeitenEtapele Carierei Şi Vieţii ProfesionaleAnna Apetri100% (2)
- Biomateriale 2Dokument49 SeitenBiomateriale 2Anna ApetriNoch keine Bewertungen