Das könnte Ihnen auch gefallen
- Boost Converter CourseworkDokument21 SeitenBoost Converter Courseworkoopeoluwa_1Noch keine Bewertungen
- Boost ConveterDokument27 SeitenBoost ConveterMohamedNoch keine Bewertungen
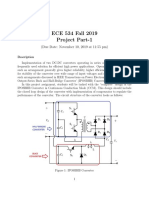
- ECE 534 Project 1 F19Dokument6 SeitenECE 534 Project 1 F19JAY CHHEDANoch keine Bewertungen
- T60 741x AE1Dokument694 SeitenT60 741x AE1kumarinelNoch keine Bewertungen
- 19 Induction Motor Fundamentals PDFDokument37 Seiten19 Induction Motor Fundamentals PDFsuchita jainNoch keine Bewertungen
- Design of 1MWp Floating Solar PhotovoltaicDokument9 SeitenDesign of 1MWp Floating Solar Photovoltaicalexbs11Noch keine Bewertungen
- First Page of AssignmentDokument8 SeitenFirst Page of Assignmentmatougabouzmila0% (1)
- What Is VK and Imag IDokument4 SeitenWhat Is VK and Imag Ijhakg_169712275Noch keine Bewertungen
- HVDC ReportDokument3 SeitenHVDC ReportSueja MalligwadNoch keine Bewertungen
- ApuntesDokument28 SeitenApuntesFrancisco RamosNoch keine Bewertungen
- 1.Hvdc Basic TheoryDokument41 Seiten1.Hvdc Basic TheoryJakka VenkatNoch keine Bewertungen
- Exp 5Dokument6 SeitenExp 5HR HabibNoch keine Bewertungen
- Reactive Power Based LCOE Analysis - SgurrEnergyDokument8 SeitenReactive Power Based LCOE Analysis - SgurrEnergySgurr EnergyNoch keine Bewertungen
- Solar Cell Parameters: WWW - Ggsy.in Training@ggsy - inDokument4 SeitenSolar Cell Parameters: WWW - Ggsy.in Training@ggsy - inImran Mazumder100% (1)
- Solar PowerDokument34 SeitenSolar PowerkhoidayvangduongNoch keine Bewertungen
- The Curves Are Used To ObtainDokument4 SeitenThe Curves Are Used To Obtainnantha74Noch keine Bewertungen
- CR4 - Thread - Knee Point Voltage and Current TransformersDokument3 SeitenCR4 - Thread - Knee Point Voltage and Current Transformersjhakg_169712275Noch keine Bewertungen
- Models For A Stand-Alone PV SystemDokument78 SeitenModels For A Stand-Alone PV Systemcristian2388Noch keine Bewertungen
- 11 - AC and DC Equivalent Circuit Modeling of The Discontinuous Conduction ModeDokument29 Seiten11 - AC and DC Equivalent Circuit Modeling of The Discontinuous Conduction ModeThanh LeNoch keine Bewertungen
- Electrical Power ProjectDokument12 SeitenElectrical Power ProjectsrnkaNoch keine Bewertungen
- Solar System CompleteDokument16 SeitenSolar System CompleteAlok JainNoch keine Bewertungen
- Photovoltaic Power Control Using MPPT and Boost ConverterDokument45 SeitenPhotovoltaic Power Control Using MPPT and Boost ConverterPedro Antonio Liberona SantibañezNoch keine Bewertungen
- Three Phase Transformer InfoDokument7 SeitenThree Phase Transformer InfojbebinNoch keine Bewertungen
- Electrical Primary Design of 35 KVDokument66 SeitenElectrical Primary Design of 35 KVsamiaNoch keine Bewertungen
- Progress Report of Minor ProjectDokument32 SeitenProgress Report of Minor ProjectVaibhav DahiyaNoch keine Bewertungen
- ECE551 - Homework 3 Solution - Spring 2019Dokument9 SeitenECE551 - Homework 3 Solution - Spring 2019JAY CHHEDANoch keine Bewertungen
- Modeling of Solar PV System Under Partial Shading Using Particle Swarm Optimization Based MPPTDokument7 SeitenModeling of Solar PV System Under Partial Shading Using Particle Swarm Optimization Based MPPTAnonymous CUPykm6DZNoch keine Bewertungen
- Appendix A Technical Specification PhotovoltaicsDokument4 SeitenAppendix A Technical Specification Photovoltaics4gen_1Noch keine Bewertungen
- Unit IV Wind and Solar Energy System 7thDokument12 SeitenUnit IV Wind and Solar Energy System 7thmalik shafkatNoch keine Bewertungen
- Design and Implementation of A G P Photovoltaic Maximum Power Point TrackerDokument55 SeitenDesign and Implementation of A G P Photovoltaic Maximum Power Point TrackerBilal KanjNoch keine Bewertungen
- Prepaid Energy Meter Using Smart CardDokument14 SeitenPrepaid Energy Meter Using Smart CardanjalikaranNoch keine Bewertungen
- Final Year Project 30 AprilDokument25 SeitenFinal Year Project 30 AprilTobaNoch keine Bewertungen
- Pole No. Number and Type of Transformer Lighting Refrigerator Electric Range Water Heater Maximum Demand KVADokument6 SeitenPole No. Number and Type of Transformer Lighting Refrigerator Electric Range Water Heater Maximum Demand KVAmaria neneng bulakNoch keine Bewertungen
- TÜV Rheinland Quality Monitor 2019Dokument19 SeitenTÜV Rheinland Quality Monitor 2019Venkataramanan SNoch keine Bewertungen
- A Matlab / Simulink Based Tool For Power Electronic CircuitsDokument6 SeitenA Matlab / Simulink Based Tool For Power Electronic CircuitstatacpsNoch keine Bewertungen
- Power Factor: What Is The Difference Between Lagging Power Factor and Leading Power Factor?Dokument64 SeitenPower Factor: What Is The Difference Between Lagging Power Factor and Leading Power Factor?Malik Jameel100% (1)
- Midterm Exam Fall 2012Dokument5 SeitenMidterm Exam Fall 2012Asanka RodrigoNoch keine Bewertungen
- Design PV WasiniDokument32 SeitenDesign PV WasiniKevin Kimani MainaNoch keine Bewertungen
- Solar Cell AssignmentDokument3 SeitenSolar Cell AssignmentMashood NasirNoch keine Bewertungen
- Unit-I: Introduction of BJTDokument56 SeitenUnit-I: Introduction of BJThodeegits9526Noch keine Bewertungen
- Syllabus For Power Electronics and DriveDokument34 SeitenSyllabus For Power Electronics and Drivearavi1979Noch keine Bewertungen
- Lab No. 2-ENA PDFDokument5 SeitenLab No. 2-ENA PDFFarah AkramNoch keine Bewertungen
- Loss Due To Ambient TemperatureDokument7 SeitenLoss Due To Ambient TemperatureRaam Perumal67% (3)
- Cuk, Sepic Zeta NptelDokument20 SeitenCuk, Sepic Zeta NptelAvinash Babu KmNoch keine Bewertungen
- ECE 611 SP17 Homework 1Dokument3 SeitenECE 611 SP17 Homework 1hanythekingNoch keine Bewertungen
- Determination of The Minimum Distance Between Adjacent Rows of Solar Panels To Avoid Shading EffectDokument21 SeitenDetermination of The Minimum Distance Between Adjacent Rows of Solar Panels To Avoid Shading EffectKhadija MehjebinNoch keine Bewertungen
- 534621ijsetr1142 259Dokument7 Seiten534621ijsetr1142 259Hannu PortilloNoch keine Bewertungen
- Annexe 2 - ESKOM Cost Estimate Letter No IPP293459467 - Legoko 3 PV PlantDokument46 SeitenAnnexe 2 - ESKOM Cost Estimate Letter No IPP293459467 - Legoko 3 PV PlantalfredoNoch keine Bewertungen
- Solar Energy Projects ListDokument8 SeitenSolar Energy Projects ListSanjana Singh100% (1)
- Introduction and BackgroundDokument8 SeitenIntroduction and Backgroundyohannes getachewNoch keine Bewertungen
- Buck Boost ConverterDokument3 SeitenBuck Boost ConverterArnoldo ZereceroNoch keine Bewertungen
- INVT GD35 FaultDokument10 SeitenINVT GD35 Faultphth411Noch keine Bewertungen
- CR4 - Thread - Calculating Earth Loop ImpedanceDokument3 SeitenCR4 - Thread - Calculating Earth Loop Impedancesarang11Noch keine Bewertungen
- M.g.say ch01Dokument5 SeitenM.g.say ch01prabhjot singh150% (2)
- DC-DC ConverterDokument24 SeitenDC-DC ConverterkandularanjithNoch keine Bewertungen
- PhotovoltaicDokument27 SeitenPhotovoltaicSakleshpur EvergreenNoch keine Bewertungen
- Design and Implementation of A Solar Power SystemDokument6 SeitenDesign and Implementation of A Solar Power SystemEditor IJTSRDNoch keine Bewertungen
- 3D Photovoltaic Devices Complete Self-Assessment GuideVon Everand3D Photovoltaic Devices Complete Self-Assessment GuideNoch keine Bewertungen
- Degradation, Mitigation, and Forecasting Approaches in Thin Film PhotovoltaicsVon EverandDegradation, Mitigation, and Forecasting Approaches in Thin Film PhotovoltaicsNoch keine Bewertungen
- Electrical Load-Curve Coverage: Proceedings of the Symposium on Load-Curve Coverage in Future Electric Power Generating Systems, Organized by the Committee on Electric Power, United Nations Economic Commission for Europe, Rome, Italy, 24 – 28 October 1977Von EverandElectrical Load-Curve Coverage: Proceedings of the Symposium on Load-Curve Coverage in Future Electric Power Generating Systems, Organized by the Committee on Electric Power, United Nations Economic Commission for Europe, Rome, Italy, 24 – 28 October 1977Noch keine Bewertungen
- Marnay Et Al 2008 Optimal Technology Selection and Operation of Commercial Building MicrogridsDokument8 SeitenMarnay Et Al 2008 Optimal Technology Selection and Operation of Commercial Building MicrogridselectrotehnicaNoch keine Bewertungen
- ATEE 2004 Ilas 4.1Dokument6 SeitenATEE 2004 Ilas 4.1electrotehnicaNoch keine Bewertungen
- Repetitive Control of MIMO Systems Using H Design: George Weiss, Martin Ha K FeleDokument15 SeitenRepetitive Control of MIMO Systems Using H Design: George Weiss, Martin Ha K FeleelectrotehnicaNoch keine Bewertungen
- ATEE 2004 Constantinescu 10Dokument6 SeitenATEE 2004 Constantinescu 10electrotehnicaNoch keine Bewertungen
- Atee 2004 Gheorghe HortopanDokument8 SeitenAtee 2004 Gheorghe HortopanelectrotehnicaNoch keine Bewertungen
- 059 Article EquationsDokument17 Seiten059 Article EquationselectrotehnicaNoch keine Bewertungen
- ATEE 2004 Paltanea 5.6Dokument6 SeitenATEE 2004 Paltanea 5.6electrotehnicaNoch keine Bewertungen
- AWC Series Handout UKDokument4 SeitenAWC Series Handout UKelectrotehnicaNoch keine Bewertungen
- Mat LabDokument129 SeitenMat Labzorro21072107Noch keine Bewertungen
- 11 AbociDokument10 Seiten11 AbocielectrotehnicaNoch keine Bewertungen
- Lucrare Sesiune - Drumea VLADIMIRDokument17 SeitenLucrare Sesiune - Drumea VLADIMIRelectrotehnicaNoch keine Bewertungen
- Green ComputingDokument209 SeitenGreen ComputingRay ChiewNoch keine Bewertungen
- Pic MicrocontrollersDokument154 SeitenPic MicrocontrollersGandy Torres TorresNoch keine Bewertungen
- Barbes L..Dokument7 SeitenBarbes L..electrotehnicaNoch keine Bewertungen
- Math ExamDokument4 SeitenMath ExamHenry TuganoNoch keine Bewertungen
- Vacon NXP Sia I Apfiff10v244 Application Manual Ud01079d en v001Dokument104 SeitenVacon NXP Sia I Apfiff10v244 Application Manual Ud01079d en v001Luca CerianiNoch keine Bewertungen
- Electrical Load ListDokument2 SeitenElectrical Load ListAhmed EssaNoch keine Bewertungen
- GD310-UL Series VFD ManualDokument259 SeitenGD310-UL Series VFD ManualErnesto FloresNoch keine Bewertungen
- Product Information: Toshiba X-Ray Tube D-0813 / D-0813S / D-0813SBDokument8 SeitenProduct Information: Toshiba X-Ray Tube D-0813 / D-0813S / D-0813SBKamilNoch keine Bewertungen
- Preliminary Reviewer: Analytical ChemistryDokument5 SeitenPreliminary Reviewer: Analytical ChemistrySynne FournierNoch keine Bewertungen
- DC Generators PPT 3974378 (Rujuk)Dokument93 SeitenDC Generators PPT 3974378 (Rujuk)Mahesvaran SubramaniamNoch keine Bewertungen
- Geometry Formulas 2D 3D Perimeter Area Volume PDFDokument2 SeitenGeometry Formulas 2D 3D Perimeter Area Volume PDFBillNoch keine Bewertungen
- Oriental Motor RK Series PDFDokument28 SeitenOriental Motor RK Series PDFTinesh ShanNoch keine Bewertungen
- Chapter 10 - InductanceDokument53 SeitenChapter 10 - InductanceAlejandro TV Learning ChannelNoch keine Bewertungen
- MTS9000A Multiple Telecommunication System User Manual Russia Megafone MTS9513A-AD2002Dokument65 SeitenMTS9000A Multiple Telecommunication System User Manual Russia Megafone MTS9513A-AD2002Влад ТолчеевNoch keine Bewertungen
- Lecture-III Basics of Pinch Analysis - 2Dokument35 SeitenLecture-III Basics of Pinch Analysis - 2Chalachew NigussieNoch keine Bewertungen
- Sheet (2) - Combustion and Furnaces - First Law - MEP363-Fall-2019Dokument3 SeitenSheet (2) - Combustion and Furnaces - First Law - MEP363-Fall-2019ahmed khaledNoch keine Bewertungen
- 7 Distributed ForcesDokument10 Seiten7 Distributed ForcesAin FarhanNoch keine Bewertungen
- Lesson 6 Tape Corrections PDFDokument27 SeitenLesson 6 Tape Corrections PDFMikeNoch keine Bewertungen
- Lecture 10 Method of Virtual WorkDokument11 SeitenLecture 10 Method of Virtual WorkAnonymous yorzHjDBdNoch keine Bewertungen
- GRZ100B 6F2S0846 0.3Dokument447 SeitenGRZ100B 6F2S0846 0.3Vivek KhedgaonkarNoch keine Bewertungen
- Advanced Motion Controls PS30ADokument3 SeitenAdvanced Motion Controls PS30AServo2GoNoch keine Bewertungen
- Bipolar Junction Transistors Talha Syed NaqviDokument51 SeitenBipolar Junction Transistors Talha Syed NaqviMuhammad AwaisNoch keine Bewertungen
- Throttlong CalorimeterDokument6 SeitenThrottlong Calorimetersubhash bhatNoch keine Bewertungen
- 7SEE - EID - Assignment 02Dokument1 Seite7SEE - EID - Assignment 02ptarwatkar123Noch keine Bewertungen
- A Review of Current Electrostatic Measurement TechniquesDokument7 SeitenA Review of Current Electrostatic Measurement TechniquesJan Posvic100% (2)
- Inverter Pricelist: Sr. No Rating Description of Goods Sales PricesDokument3 SeitenInverter Pricelist: Sr. No Rating Description of Goods Sales PricesYuvaraj JeyachandranNoch keine Bewertungen
- Physics - FUNGAT: (Chapter 1+2 B-I)Dokument3 SeitenPhysics - FUNGAT: (Chapter 1+2 B-I)XXXNoch keine Bewertungen
- DCMT Lecture Notes Full - 230406 - 110711Dokument111 SeitenDCMT Lecture Notes Full - 230406 - 1107114402 Ajesh RNoch keine Bewertungen
- Try MeDokument9 SeitenTry MeKrizzete HernandezNoch keine Bewertungen
- Differential EquationDokument6 SeitenDifferential Equationমে হে দীNoch keine Bewertungen
- HA16129FPJ: Single Watchdog TimerDokument24 SeitenHA16129FPJ: Single Watchdog TimerMichael PorterNoch keine Bewertungen
- Force and Turning EffectDokument3 SeitenForce and Turning EffectDhanBahadurNoch keine Bewertungen