Das könnte Ihnen auch gefallen
- Guidelines MultibeamDokument9 SeitenGuidelines MultibeamDiego D. MantillaNoch keine Bewertungen
- Carbon Capture and Storage: The Legal Landscape of Climate Change Mitigation TechnologyVon EverandCarbon Capture and Storage: The Legal Landscape of Climate Change Mitigation TechnologyNoch keine Bewertungen
- Numerical Models for Submerged Breakwaters: Coastal Hydrodynamics and MorphodynamicsVon EverandNumerical Models for Submerged Breakwaters: Coastal Hydrodynamics and MorphodynamicsNoch keine Bewertungen
- Design and Construction of Mounds for Breakwaters and Coastal ProtectionVon EverandDesign and Construction of Mounds for Breakwaters and Coastal ProtectionBewertung: 5 von 5 Sternen5/5 (1)
- Formation Testing: Supercharge, Pressure Testing, and Contamination ModelsVon EverandFormation Testing: Supercharge, Pressure Testing, and Contamination ModelsNoch keine Bewertungen
- Kuliah 1-HIDROGRAFIDokument61 SeitenKuliah 1-HIDROGRAFIaizatNoch keine Bewertungen
- Mechanics of Offshore Pipelines: Volume I: Buckling and CollapseVon EverandMechanics of Offshore Pipelines: Volume I: Buckling and CollapseNoch keine Bewertungen
- A Guide Book: Sub-Surface Data Management for Data Managers (Oil & Gas Sector) Volume -1 SeismicVon EverandA Guide Book: Sub-Surface Data Management for Data Managers (Oil & Gas Sector) Volume -1 SeismicNoch keine Bewertungen
- Offshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsVon EverandOffshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsNoch keine Bewertungen
- Waves on Beaches and Resulting Sediment Transport: Proceedings of an Advanced Seminar, Conducted by the Mathematics Research Center, the University of Wisconsin, and the Coastal Engineering Research Center, U. S. Army, at Madison, October 11–13, 1971Von EverandWaves on Beaches and Resulting Sediment Transport: Proceedings of an Advanced Seminar, Conducted by the Mathematics Research Center, the University of Wisconsin, and the Coastal Engineering Research Center, U. S. Army, at Madison, October 11–13, 1971R. E. MeyerNoch keine Bewertungen
- SES2000 Medium Operator's Quick Start Manual - InnomarDokument20 SeitenSES2000 Medium Operator's Quick Start Manual - InnomarhenryNoch keine Bewertungen
- SICAMS - Metrology SubseaDokument17 SeitenSICAMS - Metrology SubseaSkee76Noch keine Bewertungen
- RTS Gen 5 MUX MK II - Technical Manual Rev 1 23Dokument59 SeitenRTS Gen 5 MUX MK II - Technical Manual Rev 1 23Brad BurnessNoch keine Bewertungen
- EIVA SpecificationDokument68 SeitenEIVA SpecificationCharles100% (1)
- USBL Cal ManualDokument40 SeitenUSBL Cal ManualTuan OsmanNoch keine Bewertungen
- CT Dredging Soil Lecture1a 2012Dokument13 SeitenCT Dredging Soil Lecture1a 2012rme11maNoch keine Bewertungen
- Q034-May-18 ASI Timas Survey ServicesDokument19 SeitenQ034-May-18 ASI Timas Survey ServicesAulia AkbarNoch keine Bewertungen
- Overview Sub-Bottom Imager - PanGeo SubseaDokument3 SeitenOverview Sub-Bottom Imager - PanGeo SubseaWidya widyaNoch keine Bewertungen
- Multibeam SurveyingDokument1 SeiteMultibeam Surveyingminik19Noch keine Bewertungen
- Damen Cutter Suction Dredger 650Dokument2 SeitenDamen Cutter Suction Dredger 650Fajrin M. NatsirNoch keine Bewertungen
- BOP Acoustic SystemDokument4 SeitenBOP Acoustic Systemdondo1004Noch keine Bewertungen
- S-44 5eDokument36 SeitenS-44 5emangaceng100% (1)
- PHINS Guideline - Rev A3Dokument63 SeitenPHINS Guideline - Rev A3Marzuki ChemenorNoch keine Bewertungen
- Octansiii Ug Part 2 Octans Surface Ug Mu-octiii-003-ADokument32 SeitenOctansiii Ug Part 2 Octans Surface Ug Mu-octiii-003-ApankajNoch keine Bewertungen
- Stockless Anchor DimensionsDokument0 SeitenStockless Anchor DimensionsAdriel NardoNoch keine Bewertungen
- The Calibration of Shallow Water MBESDokument200 SeitenThe Calibration of Shallow Water MBESfawzarNoch keine Bewertungen
- SeaPerch ROV Construction Manual - Standard Assembly - Version 2010-02 - DS013011Dokument103 SeitenSeaPerch ROV Construction Manual - Standard Assembly - Version 2010-02 - DS013011amirrulasyrafNoch keine Bewertungen
- SonarWiz RelNotes V6!05!0015Dokument33 SeitenSonarWiz RelNotes V6!05!0015mizonexNoch keine Bewertungen
- G - ST - TSH - 017B - GapsDokument29 SeitenG - ST - TSH - 017B - GapssrvshdrrNoch keine Bewertungen
- LBL Acoustic Work InstructionDokument13 SeitenLBL Acoustic Work InstructionFranklin HallNoch keine Bewertungen
- Rov Pilot: My Story - Case Study of An ..Dokument2 SeitenRov Pilot: My Story - Case Study of An ..Andrea G. MorenoNoch keine Bewertungen
- The Principle of Side Scan Sonar and Its Application in The Detection of Suspended Submarine Pipeline TreatmentDokument6 SeitenThe Principle of Side Scan Sonar and Its Application in The Detection of Suspended Submarine Pipeline TreatmentAlfian RomadhoniNoch keine Bewertungen
- ROV Intervention Catalogue PDFDokument84 SeitenROV Intervention Catalogue PDFscibduser001Noch keine Bewertungen
- Geodetic Offshore Services LTD: S H & E ManualDokument55 SeitenGeodetic Offshore Services LTD: S H & E Manualflawlessy2kNoch keine Bewertungen
- Adcs Adcs0114Dokument102 SeitenAdcs Adcs0114andresqbulNoch keine Bewertungen
- Ot5304 Subsea Construction & Operational Support Assignment 1 Research of Autonomous Underwater Vehicles TechnologiesDokument40 SeitenOt5304 Subsea Construction & Operational Support Assignment 1 Research of Autonomous Underwater Vehicles TechnologiesWeilun OngNoch keine Bewertungen
- What Is An RovDokument32 SeitenWhat Is An RovkasminahNoch keine Bewertungen
- 9607 BRO 0008 03 Flexible Riser Brochure SCREENDokument4 Seiten9607 BRO 0008 03 Flexible Riser Brochure SCREENsiswoutNoch keine Bewertungen
- 12 - Helmsmans DisplayyyDokument96 Seiten12 - Helmsmans Displayyyflawlessy2kNoch keine Bewertungen
- Thomas Lamb - A Ship Design ProcedureDokument12 SeitenThomas Lamb - A Ship Design Procedurenf_azevedo100% (1)
- AF05-TECH.02 R00 - RANA AF05 Modular Saturation Diving System - Technical Data SheetDokument24 SeitenAF05-TECH.02 R00 - RANA AF05 Modular Saturation Diving System - Technical Data SheetfrdsimNoch keine Bewertungen
- MM-802X A1 - Usbl Transceivers PDFDokument78 SeitenMM-802X A1 - Usbl Transceivers PDFRomi OktavianusNoch keine Bewertungen
- SSV Cougar XTC Operatorsl Technical Training Syllabus PDFDokument7 SeitenSSV Cougar XTC Operatorsl Technical Training Syllabus PDFlchurch13Noch keine Bewertungen
- Offshore Workspace WP2 Task 7b Alternative Installation MethodsDokument27 SeitenOffshore Workspace WP2 Task 7b Alternative Installation MethodsNguyễn Văn BanNoch keine Bewertungen
- PRS - Diverless Connection System - HorizontalDokument2 SeitenPRS - Diverless Connection System - HorizontalPedro DutraNoch keine Bewertungen
- Mooring Chain Fatigue (FLS) ConditionDokument12 SeitenMooring Chain Fatigue (FLS) ConditionDefi Rizki MaulianiNoch keine Bewertungen
- DredgingDokument10 SeitenDredgingsanjivsingNoch keine Bewertungen
- Cable and Flowline Products Uraduct and StraductDokument20 SeitenCable and Flowline Products Uraduct and StraductfralgiugiaNoch keine Bewertungen
- 730 AaDokument134 Seiten730 AaRini MathewNoch keine Bewertungen
- SonarWiz SBP GuideDokument29 SeitenSonarWiz SBP GuideArga TyoNoch keine Bewertungen
- Marine SurveyDokument74 SeitenMarine SurveylutetuNoch keine Bewertungen
- ROV Tooling 3Dokument41 SeitenROV Tooling 3siswout100% (1)
- Export SCR Riser Analysis Report - Kim Young TaeDokument30 SeitenExport SCR Riser Analysis Report - Kim Young TaeYoungtae Kim100% (1)
- Manual FO Can ROV TritonDokument6 SeitenManual FO Can ROV TritonReza Jati ReynaldiNoch keine Bewertungen
- Subsea Flexible Flowline InstallationDokument6 SeitenSubsea Flexible Flowline InstallationAslan AlpNoch keine Bewertungen
- 2D Seismic TutorialDokument264 Seiten2D Seismic Tutorialjose razoNoch keine Bewertungen
- Pub. 174 Strait of Malacca and Sumatera 10ed 2008Dokument172 SeitenPub. 174 Strait of Malacca and Sumatera 10ed 2008joop12Noch keine Bewertungen
- General Laying ProceduresDokument20 SeitenGeneral Laying ProceduresLiladhar Ganesh Dhoble100% (1)
- Do 00032 E1Dokument1 SeiteDo 00032 E1XhuLE7oNoch keine Bewertungen
- TSS DMS-05 - BrochureDokument2 SeitenTSS DMS-05 - BrochureXhuLE7oNoch keine Bewertungen
- Tss Dms-05 Dynamic Motion Sensor: Making Technology Work For You!Dokument2 SeitenTss Dms-05 Dynamic Motion Sensor: Making Technology Work For You!XhuLE7oNoch keine Bewertungen
- 91X Mini BeaconsDokument2 Seiten91X Mini BeaconsXhuLE7oNoch keine Bewertungen
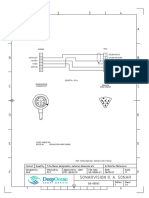
- Connecting External Power or An External Trigger To The BeaconDokument1 SeiteConnecting External Power or An External Trigger To The BeaconXhuLE7oNoch keine Bewertungen
- Layout - Survey With SB-216S and SeabatDokument1 SeiteLayout - Survey With SB-216S and SeabatXhuLE7oNoch keine Bewertungen
- CDL TOGS - Datasheet PDFDokument2 SeitenCDL TOGS - Datasheet PDFXhuLE7oNoch keine Bewertungen
- Valeport Midas CTDDokument67 SeitenValeport Midas CTDXhuLE7oNoch keine Bewertungen
- Carretes para MangueraDokument145 SeitenCarretes para MangueraXhuLE7oNoch keine Bewertungen
- VtDA - The Ashen Cults (Vampire Dark Ages) PDFDokument94 SeitenVtDA - The Ashen Cults (Vampire Dark Ages) PDFRafãoAraujo100% (1)
- Yukot,+houkelin 2505 11892735 Final+Paper+Group+41Dokument17 SeitenYukot,+houkelin 2505 11892735 Final+Paper+Group+410191720003 ELIAS ANTONIO BELLO LEON ESTUDIANTE ACTIVONoch keine Bewertungen
- MAT2355 Final 2002Dokument8 SeitenMAT2355 Final 2002bojie_97965Noch keine Bewertungen
- PMS Past Paper Pakistan Studies 2019Dokument3 SeitenPMS Past Paper Pakistan Studies 2019AsmaMaryamNoch keine Bewertungen
- Awareness and Usage of Internet Banking Facilities in Sri LankaDokument18 SeitenAwareness and Usage of Internet Banking Facilities in Sri LankaTharindu Thathsarana RajapakshaNoch keine Bewertungen
- Annexure 8: Medical Certificate (To Be Issued by A Registered Medical Practitioner) General ExpectationsDokument1 SeiteAnnexure 8: Medical Certificate (To Be Issued by A Registered Medical Practitioner) General ExpectationsMannepalli RamakrishnaNoch keine Bewertungen
- tf00001054 WacDokument22 Seitentf00001054 WacHritik RawatNoch keine Bewertungen
- Enunciado de La Pregunta: Finalizado Se Puntúa 1.00 Sobre 1.00Dokument9 SeitenEnunciado de La Pregunta: Finalizado Se Puntúa 1.00 Sobre 1.00Samuel MojicaNoch keine Bewertungen
- Trudy Scott Amino-AcidsDokument35 SeitenTrudy Scott Amino-AcidsPreeti100% (5)
- Origin of "ERP"Dokument4 SeitenOrigin of "ERP"kanika_bhardwaj_2Noch keine Bewertungen
- Hilti Product Technical GuideDokument16 SeitenHilti Product Technical Guidegabox707Noch keine Bewertungen
- Balezi - Annale Générale Vol 4 - 1 - 2 Fin OkDokument53 SeitenBalezi - Annale Générale Vol 4 - 1 - 2 Fin OkNcangu BenjaminNoch keine Bewertungen
- IBM System X UPS Guide v1.4.0Dokument71 SeitenIBM System X UPS Guide v1.4.0Phil JonesNoch keine Bewertungen
- GAJ Mod 18 Ace Your InterviewDokument12 SeitenGAJ Mod 18 Ace Your InterviewAnjela SantiagoNoch keine Bewertungen
- Sodium Borate: What Is Boron?Dokument2 SeitenSodium Borate: What Is Boron?Gary WhiteNoch keine Bewertungen
- Developing Global LeadersDokument10 SeitenDeveloping Global LeadersDeepa SharmaNoch keine Bewertungen
- Serological and Molecular DiagnosisDokument9 SeitenSerological and Molecular DiagnosisPAIRAT, Ella Joy M.Noch keine Bewertungen
- Final PS-37 Election Duties 06-02-24 1125pm)Dokument183 SeitenFinal PS-37 Election Duties 06-02-24 1125pm)Muhammad InamNoch keine Bewertungen
- Kurukku PadaiDokument4 SeitenKurukku PadaisimranNoch keine Bewertungen
- Case Study 1 (Pneumonia)Dokument13 SeitenCase Study 1 (Pneumonia)Kate EscotonNoch keine Bewertungen
- Romanian Oil IndustryDokument7 SeitenRomanian Oil IndustryEnot SoulaviereNoch keine Bewertungen
- Liver Disease With PregnancyDokument115 SeitenLiver Disease With PregnancyAmro Ahmed Abdelrhman100% (3)
- Insung Jung An Colin Latchem - Quality Assurance and Acreditatión in Distance Education and e - LearningDokument81 SeitenInsung Jung An Colin Latchem - Quality Assurance and Acreditatión in Distance Education and e - LearningJack000123Noch keine Bewertungen
- My ResumeDokument2 SeitenMy ResumeWan NaqimNoch keine Bewertungen
- Business Finance and The SMEsDokument6 SeitenBusiness Finance and The SMEstcandelarioNoch keine Bewertungen
- Forever Living Presentation PDFDokument34 SeitenForever Living Presentation PDFCasey Rion100% (1)
- FMEA 4th BOOK PDFDokument151 SeitenFMEA 4th BOOK PDFLuis Cárdenas100% (2)
- Blunders and How To Avoid Them Dunnington PDFDokument147 SeitenBlunders and How To Avoid Them Dunnington PDFrajveer404100% (2)
- Technique Du Micro-Enseignement Une Approche PourDokument11 SeitenTechnique Du Micro-Enseignement Une Approche PourMohamed NaciriNoch keine Bewertungen
- The Berenstain Bears and Baby Makes FiveDokument33 SeitenThe Berenstain Bears and Baby Makes Fivezhuqiming87% (54)