Das könnte Ihnen auch gefallen
- Priority Encoder Verilog CodeDokument1 SeitePriority Encoder Verilog Code2prashant2Noch keine Bewertungen
- Verilog Code For AluDokument7 SeitenVerilog Code For Alumeaow88100% (3)
- Optocoupler TutorialDokument4 SeitenOptocoupler TutorialAnonymous HXFi2kJRUvNoch keine Bewertungen
- Verilog ExamplesDokument61 SeitenVerilog ExamplesSanam Nisar100% (1)
- DSP Qs 2marksDokument36 SeitenDSP Qs 2marksanon_624151290Noch keine Bewertungen
- Steps For MOSFET Small Signal AnalysisDokument7 SeitenSteps For MOSFET Small Signal Analysisfrank wangNoch keine Bewertungen
- ManualDokument28 SeitenManualMikiNoch keine Bewertungen
- S & S 2 MarksDokument30 SeitenS & S 2 MarkspriyajegaNoch keine Bewertungen
- N (0:1:40) A 1.2 F 0.1 X A Cos (2 Pi F N) Stem (N, X,'r','filled') Xlabel ('TIME') Ylabel ('AMPLITUDE')Dokument7 SeitenN (0:1:40) A 1.2 F 0.1 X A Cos (2 Pi F N) Stem (N, X,'r','filled') Xlabel ('TIME') Ylabel ('AMPLITUDE')shakaibNoch keine Bewertungen
- DSP 2 MaarksDokument30 SeitenDSP 2 MaarksThiagu RajivNoch keine Bewertungen
- Signals and SystemsDokument22 SeitenSignals and Systemsvnrao61Noch keine Bewertungen
- 555 Timer IC and OpampDokument36 Seiten555 Timer IC and OpampDummyNoch keine Bewertungen
- DFT/ FFT Using TMS320C5515 TM eZDSP USB Stick: Via CCS and MatlabDokument12 SeitenDFT/ FFT Using TMS320C5515 TM eZDSP USB Stick: Via CCS and MatlabTrung Hoang PhanNoch keine Bewertungen
- Basic Operations On Signals PDFDokument8 SeitenBasic Operations On Signals PDFNaveen DuraNoch keine Bewertungen
- The D Flip FlopDokument7 SeitenThe D Flip FlopAlinChanNoch keine Bewertungen
- Lab 6Dokument12 SeitenLab 6Sujan HeujuNoch keine Bewertungen
- 3.1 Analog MultipliersDokument17 Seiten3.1 Analog MultipliersMarykutty CyriacNoch keine Bewertungen
- Designing A Lock-In Amplifier With Analog To Digital ConversionDokument27 SeitenDesigning A Lock-In Amplifier With Analog To Digital Conversionessi12345Noch keine Bewertungen
- Flipflops: Technical Seminar ReportDokument16 SeitenFlipflops: Technical Seminar ReportrachitNoch keine Bewertungen
- Verilog CodesDokument26 SeitenVerilog Codesnvrkrishna456Noch keine Bewertungen
- Fourier Analysis of Signals and SystemsDokument24 SeitenFourier Analysis of Signals and SystemsBabul IslamNoch keine Bewertungen
- 1 3Dokument59 Seiten1 3Anteneh AtumoNoch keine Bewertungen
- Dsa 9062Dokument8 SeitenDsa 9062Christian TadeoNoch keine Bewertungen
- Ec 1361 - Digital Signal ProcessingDokument16 SeitenEc 1361 - Digital Signal ProcessingEleazar PaclibarNoch keine Bewertungen
- Brief Notes On Signals and Systems 7.2Dokument77 SeitenBrief Notes On Signals and Systems 7.2Bhaskar Rao GopisettiNoch keine Bewertungen
- Summary of The Types of FlipDokument3 SeitenSummary of The Types of FlipAnonymous BjaA0IiYNoch keine Bewertungen
- ADC (Analog To Digital Converter) Module For FPGA DesignDokument2 SeitenADC (Analog To Digital Converter) Module For FPGA DesignIonela100% (4)
- 2 Marks DSP Bits EceDokument22 Seiten2 Marks DSP Bits EceDustin GrahamNoch keine Bewertungen
- N LMS Impedance BridgeDokument7 SeitenN LMS Impedance BridgeCazzKazikNoch keine Bewertungen
- Flip FlopDokument29 SeitenFlip FlopAndleeb juttiNoch keine Bewertungen
- Transform: of Technique For For Which - For Which That ofDokument119 SeitenTransform: of Technique For For Which - For Which That ofsk abdullahNoch keine Bewertungen
- Sel Guide TIDokument101 SeitenSel Guide TIPaul VajdovicsNoch keine Bewertungen
- Summary of The Types of FlipDokument1 SeiteSummary of The Types of FlipPola RismaNoch keine Bewertungen
- PID ModesTraining LabVoltDokument34 SeitenPID ModesTraining LabVoltRiccardo VianelloNoch keine Bewertungen
- Recorders PDFDokument9 SeitenRecorders PDFManoj PatchiyanNoch keine Bewertungen
- Flip Flop Mealy and Moore ModelDokument25 SeitenFlip Flop Mealy and Moore Modelsurajpb1989100% (1)
- Micro ProcesserDokument18 SeitenMicro ProcesserChaitali Binzade0% (1)
- IT 1252 - Digital Signal ProcessingDokument22 SeitenIT 1252 - Digital Signal Processinganon-384794100% (3)
- (EE332) (09ECE) (Group13) Report ProjectDokument23 Seiten(EE332) (09ECE) (Group13) Report ProjectNgô ĐạtNoch keine Bewertungen
- Infrared Remote Switch ReportDokument3 SeitenInfrared Remote Switch ReportsivamskrNoch keine Bewertungen
- Laplace Transform ExamplesDokument19 SeitenLaplace Transform Exampleshamza abdo mohamoudNoch keine Bewertungen
- To Make A DC Switching Circuit Using SCR'sDokument2 SeitenTo Make A DC Switching Circuit Using SCR'sH Aries OñaNoch keine Bewertungen
- Digital Signal ProcessingDokument101 SeitenDigital Signal ProcessingDheekshith ShettigaraNoch keine Bewertungen
- Diode Clamping CircuitsDokument4 SeitenDiode Clamping CircuitsftafedeNoch keine Bewertungen
- Digital Logic Design: VHDL Coding For Fpgas Unit 5Dokument34 SeitenDigital Logic Design: VHDL Coding For Fpgas Unit 5Srinivas CherukuNoch keine Bewertungen
- Verilog Code For 4 Bit Ring Counter With TestbenchDokument3 SeitenVerilog Code For 4 Bit Ring Counter With Testbenchsoumya100% (1)
- Shift Sins OutDokument11 SeitenShift Sins Outawa buayaNoch keine Bewertungen
- Introduction To Digital DesignDokument15 SeitenIntroduction To Digital DesignOzioma Teddy UkwuomaNoch keine Bewertungen
- Applications of Flip FlopDokument85 SeitenApplications of Flip FlopJohaira Maute100% (1)
- Linear Integrated Circuits Lab Manual For Flip Flops and Logic GatesDokument14 SeitenLinear Integrated Circuits Lab Manual For Flip Flops and Logic GatesTimoth DevNoch keine Bewertungen
- All Topics FpgaDokument4 SeitenAll Topics FpgaArchit GharatNoch keine Bewertungen
- Shift Register, Parallel-In, Serial-OutDokument11 SeitenShift Register, Parallel-In, Serial-OutAwa StelkNoch keine Bewertungen
- 6-Registers and CountersDokument40 Seiten6-Registers and CountersWisdom tabuloNoch keine Bewertungen
- Design and Implementation of Synchronous 4-Bit Up Counter Using 180Nm Cmos Process TechnologyDokument6 SeitenDesign and Implementation of Synchronous 4-Bit Up Counter Using 180Nm Cmos Process TechnologyreyysummerNoch keine Bewertungen
- UNIT3Dokument41 SeitenUNIT3Azliana Mohd TaibNoch keine Bewertungen
- CSE231 Lecture 7Dokument25 SeitenCSE231 Lecture 7Rayhan Amin 2212830042Noch keine Bewertungen
- Register ApplicationDokument10 SeitenRegister ApplicationSumit SinghNoch keine Bewertungen
- Chapter 6-Shift RegisterDokument18 SeitenChapter 6-Shift RegisterAnonymous On47lKiNoch keine Bewertungen
- CSE 307: Digital TechniqueDokument33 SeitenCSE 307: Digital TechniquemmlabjpNoch keine Bewertungen
- ZerocrossingdetectorDokument1 SeiteZerocrossingdetectorsandeep_036Noch keine Bewertungen
- Project PmdcmotorDokument27 SeitenProject Pmdcmotorsandeep_036Noch keine Bewertungen
- BLDCDokument6 SeitenBLDCsandeep_036Noch keine Bewertungen
- Capacity PlanningDokument23 SeitenCapacity Planningsandeep_03650% (2)
- Herbal Spa in Orissa 34Dokument22 SeitenHerbal Spa in Orissa 34sandeep_036Noch keine Bewertungen
- PSO Meander LineDokument34 SeitenPSO Meander LinevisdagNoch keine Bewertungen
- Multi-Document Check-In Counter Printer: Ultra Reliable Compact 4-Feed Bag Tag and Boarding Pass Counter PrinterDokument4 SeitenMulti-Document Check-In Counter Printer: Ultra Reliable Compact 4-Feed Bag Tag and Boarding Pass Counter PrinterasadffgNoch keine Bewertungen
- AI Better FutureDokument128 SeitenAI Better FutureAndy K100% (1)
- Best of Definition and Types of ResearchDokument42 SeitenBest of Definition and Types of ResearchZe MelieNoch keine Bewertungen
- WRM-10P: Lightweight Winding Resistance MeterDokument4 SeitenWRM-10P: Lightweight Winding Resistance Meterduong phamNoch keine Bewertungen
- MAKAUT 2020-2021 ODD Sem Theory Exam Schedule - All B.Tech BSC BCA and MTechDokument84 SeitenMAKAUT 2020-2021 ODD Sem Theory Exam Schedule - All B.Tech BSC BCA and MTechArpan DasNoch keine Bewertungen
- UL Standards@@ For Airxchange WheelsDokument1 SeiteUL Standards@@ For Airxchange Wheelsseyyed jamal mirjaliliNoch keine Bewertungen
- Exercise 01Dokument13 SeitenExercise 01QsdtYudeNoch keine Bewertungen
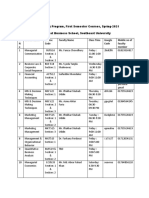
- SL N o Course Name Course Code Faculty Name Class Time Google Code Mobile No of Faculty MemberDokument2 SeitenSL N o Course Name Course Code Faculty Name Class Time Google Code Mobile No of Faculty Memberএ.বি.এস. আশিকNoch keine Bewertungen
- ZVEI Industrie 40 Component EnglishDokument2 SeitenZVEI Industrie 40 Component EnglishAllagui AmalNoch keine Bewertungen
- Email CorrespondenceDokument10 SeitenEmail CorrespondenceOSHIN KUMARINoch keine Bewertungen
- Balloon Scale: Air Has Weight: Objective: Materials: ProcedureDokument9 SeitenBalloon Scale: Air Has Weight: Objective: Materials: ProcedureDaoud KhanNoch keine Bewertungen
- Chapter-85 (Electrical Items)Dokument13 SeitenChapter-85 (Electrical Items)Atiqur RahmanNoch keine Bewertungen
- 2016 - (Schwalbe) - Guide To Using Microsoft Project 2013Dokument64 Seiten2016 - (Schwalbe) - Guide To Using Microsoft Project 2013Mã HuyNoch keine Bewertungen
- Assignment On Introduction To Algorithm: Submitted byDokument12 SeitenAssignment On Introduction To Algorithm: Submitted byvivonNoch keine Bewertungen
- Insulation Presentation - LucasDokument8 SeitenInsulation Presentation - Lucasapi-502219083Noch keine Bewertungen
- GM Maint Catalog PDFDokument38 SeitenGM Maint Catalog PDFMarcelo ArayaNoch keine Bewertungen
- Zegar 7-DaysDokument6 SeitenZegar 7-DaysAndrzej MożejkoNoch keine Bewertungen
- Future of Consulting Consulting SuccessDokument62 SeitenFuture of Consulting Consulting SuccessDragan100% (4)
- LR Certificate ACS880 01 2014 3AXD10000381105 ADokument7 SeitenLR Certificate ACS880 01 2014 3AXD10000381105 AFan JeryNoch keine Bewertungen
- Categorizing Faults Via DGA: GE Grid Solutions M&DDokument30 SeitenCategorizing Faults Via DGA: GE Grid Solutions M&DMurali KrishnaNoch keine Bewertungen
- Data Science For AgricultureDokument5 SeitenData Science For AgriculturesmartguykrishNoch keine Bewertungen
- TPACK-Integrated Science Lesson Exemplar and The Academic Achievement of Grade 8 Students of Ugad High SchoolDokument7 SeitenTPACK-Integrated Science Lesson Exemplar and The Academic Achievement of Grade 8 Students of Ugad High SchoolPsychology and Education: A Multidisciplinary JournalNoch keine Bewertungen
- G406L Quad CH Video Wall Controller Datasheet V2.02Dokument7 SeitenG406L Quad CH Video Wall Controller Datasheet V2.02Noob Master IndonesiaNoch keine Bewertungen
- Al-Amara 4 X 125Mw 9E: Spare Part List For Erection, Commissioning, and Start-UpDokument8 SeitenAl-Amara 4 X 125Mw 9E: Spare Part List For Erection, Commissioning, and Start-UpElias Abu FakherNoch keine Bewertungen
- Adaptive Dynamic Relaxation Algorithm For Non-Linear Hyperelastic StructuresDokument19 SeitenAdaptive Dynamic Relaxation Algorithm For Non-Linear Hyperelastic StructuresJoaquin VieraNoch keine Bewertungen
- Client Analysis: Grainger and Bosch CapstoneDokument25 SeitenClient Analysis: Grainger and Bosch CapstoneKazi Shadid RaiyanNoch keine Bewertungen
- Green-Mode PWM Controller With Frequency Swapping and Audio Noise PreventionDokument18 SeitenGreen-Mode PWM Controller With Frequency Swapping and Audio Noise PreventionPaulo Roberto s freireNoch keine Bewertungen
- D112 ENGLISH VersionDokument2 SeitenD112 ENGLISH VersionRinor Rushiti100% (1)
- Chap02 - 1 - Nonlinear Equs - BisectionFalse-PositionDokument35 SeitenChap02 - 1 - Nonlinear Equs - BisectionFalse-PositionaliNoch keine Bewertungen
- Airbus A310 ChecklistDokument4 SeitenAirbus A310 ChecklistJonathan NoriegaNoch keine Bewertungen