Das könnte Ihnen auch gefallen
- Architecture Des Machines Et Des Systèmes InformatiquesDokument464 SeitenArchitecture Des Machines Et Des Systèmes InformatiquesMohamadou Mouctar OUMAROU SEYBOU100% (1)
- Préparer DALF C1-C2Dokument1 SeitePréparer DALF C1-C2cultureinternationalclub20% (5)
- Batterie À Semi-Conducteurs: Ce n'est que lorsque les batteries à semi-conducteurs arriveront que vous achèterez une voiture électriqueVon EverandBatterie À Semi-Conducteurs: Ce n'est que lorsque les batteries à semi-conducteurs arriveront que vous achèterez une voiture électriqueNoch keine Bewertungen
- Les sciences économiques : de l’université aux concoursVon EverandLes sciences économiques : de l’université aux concoursNoch keine Bewertungen
- Extraction et Gestion des Connaissances: Actes de la conférence EGC'2019Von EverandExtraction et Gestion des Connaissances: Actes de la conférence EGC'2019Bewertung: 5 von 5 Sternen5/5 (1)
- Instrumentation Industrielle PDFDokument172 SeitenInstrumentation Industrielle PDFredaNoch keine Bewertungen
- TOEIC 2022 23 Sem1 ÉtudiantDokument110 SeitenTOEIC 2022 23 Sem1 ÉtudiantYanouNoch keine Bewertungen
- Bapteme Et Plenitude Du Saint-Esprit J-L RougeDokument5 SeitenBapteme Et Plenitude Du Saint-Esprit J-L RougedjeNoch keine Bewertungen
- RID4NOTADokument111 SeitenRID4NOTANIENoch keine Bewertungen
- Gestion Des ProcessusDokument5 SeitenGestion Des ProcessusHajar GuedamiNoch keine Bewertungen
- Gestion de ScolaritéDokument5 SeitenGestion de ScolaritéMoncef Computer75% (4)
- Performance économique des politiques publiques: Évaluation des coûts-avantages et analyse d'impacts contrefactuelsVon EverandPerformance économique des politiques publiques: Évaluation des coûts-avantages et analyse d'impacts contrefactuelsNoch keine Bewertungen
- 1sbc101001c0302 - Solutions de Demarrage Moteur - 2Dokument66 Seiten1sbc101001c0302 - Solutions de Demarrage Moteur - 2Mohamed Ait Lahcen100% (1)
- GRAFCET RegleDokument43 SeitenGRAFCET RegleAbdallah BelabbesNoch keine Bewertungen
- Commande de Moteur Asynchrones en PDFDokument13 SeitenCommande de Moteur Asynchrones en PDFabdennabi lahdiriNoch keine Bewertungen
- Le Coran Et Son Contexte Remarques Sur UDokument24 SeitenLe Coran Et Son Contexte Remarques Sur UMohamed ChibouchNoch keine Bewertungen
- GRAFCET Et Equations-CorrigeDokument14 SeitenGRAFCET Et Equations-Corrigea.ghani BaRaCuDa100% (1)
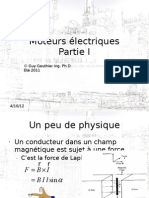
- Moteurs Electriques 01Dokument129 SeitenMoteurs Electriques 01Slim SaloumNoch keine Bewertungen
- Bla BlaDokument9 SeitenBla BlaSimo LaassiriNoch keine Bewertungen
- Cours API2Dokument124 SeitenCours API2Mbarek OrabiNoch keine Bewertungen
- Thème: Master AcademiqueDokument120 SeitenThème: Master AcademiqueKhaled MasoudiNoch keine Bewertungen
- Chapitre2 GrafcetDokument15 SeitenChapitre2 GrafcetSoufien AtouiNoch keine Bewertungen
- M2 AUTO AI922 CorrigéDokument3 SeitenM2 AUTO AI922 Corrigéchaib draa hadjerNoch keine Bewertungen
- Bloc Compteur s7Dokument3 SeitenBloc Compteur s7Khaled OuniNoch keine Bewertungen
- Diagnostic Des SystemesDokument4 SeitenDiagnostic Des SystemesMejdi AbassiNoch keine Bewertungen
- TD - N03 - Solutions - PDF Version 1Dokument24 SeitenTD - N03 - Solutions - PDF Version 1org 2019Noch keine Bewertungen
- SadiAdel PDFDokument75 SeitenSadiAdel PDFTamokoueNoch keine Bewertungen
- Graf CetDokument8 SeitenGraf CetDankov2Noch keine Bewertungen
- Premiers Pas Dans La Programmation S7 Version 07Dokument14 SeitenPremiers Pas Dans La Programmation S7 Version 07jamal64722111Noch keine Bewertungen
- EMSI 1 Er SemestreDokument1 SeiteEMSI 1 Er Semestrenounou_nounou88Noch keine Bewertungen
- Un Point D'isolationDokument68 SeitenUn Point D'isolationAymenNoch keine Bewertungen
- Oumohandali AmrarenemouloudDokument111 SeitenOumohandali AmrarenemouloudMehdi ZribaNoch keine Bewertungen
- Movitrac 31CDokument108 SeitenMovitrac 31Cmourad bjijNoch keine Bewertungen
- Memoire Benchikh Lehocine 2016 PDFDokument82 SeitenMemoire Benchikh Lehocine 2016 PDFMehdi BoussehabaNoch keine Bewertungen
- SmailSamia ZiboucheSoniaDokument99 SeitenSmailSamia ZiboucheSoniaAbdelmajid TaaliNoch keine Bewertungen
- 02 Grafcet Points de Vue ProfDokument7 Seiten02 Grafcet Points de Vue ProfPapy ElpololokoNoch keine Bewertungen
- 1 - AUTOM 20202021 ÉtudiantscourDokument10 Seiten1 - AUTOM 20202021 Étudiantscourmax hebertNoch keine Bewertungen
- Bascule SDokument15 SeitenBascule SManar BouNoch keine Bewertungen
- ProtectionDokument19 SeitenProtectionnradhy2725Noch keine Bewertungen
- Cours APIs ESA2Dokument17 SeitenCours APIs ESA2Nek Moussa100% (1)
- 02 Syh FRDokument7 Seiten02 Syh FRAbdelkrim LamrousNoch keine Bewertungen
- Plan Comptable Général MarocainDokument24 SeitenPlan Comptable Général MarocainOTHMAN32100% (2)
- Mesure Des Tensions Et Des CourantsDokument5 SeitenMesure Des Tensions Et Des Courantsbelaid2009Noch keine Bewertungen
- Electro Pneumatic FRDokument47 SeitenElectro Pneumatic FRPirate_KillerNoch keine Bewertungen
- Automatique RegulationDokument148 SeitenAutomatique RegulationAymen Chaaira100% (2)
- Cours Automatisme Industriel 2Dokument57 SeitenCours Automatisme Industriel 2Refka KaabiNoch keine Bewertungen
- Chapitre 2 4 Synthese Des CompteursDokument10 SeitenChapitre 2 4 Synthese Des CompteursIddir YuderNoch keine Bewertungen
- Chapitre01 APIDokument60 SeitenChapitre01 APIاشر اقNoch keine Bewertungen
- 1-Mise Sous Forme EtatDokument8 Seiten1-Mise Sous Forme EtatAllel BradleyNoch keine Bewertungen
- Micro Économie S1.Dokument35 SeitenMicro Économie S1.abdofattahNoch keine Bewertungen
- Rapport PfaDokument46 SeitenRapport PfaErrafiy OmarNoch keine Bewertungen
- Analyse Structurelle D - Un Système AutomatiséDokument11 SeitenAnalyse Structurelle D - Un Système AutomatiséAbdeslamNoch keine Bewertungen
- Transformateur de Manier SimpleDokument28 SeitenTransformateur de Manier Simplefethi100% (1)
- IEEE Paper Template in A4Dokument4 SeitenIEEE Paper Template in A4Marwane HabibNoch keine Bewertungen
- C Blage Entr Es Sorties AutomateDokument3 SeitenC Blage Entr Es Sorties AutomateSaid MaatiNoch keine Bewertungen
- Id 8996 PDFDokument47 SeitenId 8996 PDFAmel AlidraNoch keine Bewertungen
- TP1: Alternateur Triphasé Modèles À Réactance Constante: Réaliser Par: Hassine Abir Classe & Filiére & GroupeDokument2 SeitenTP1: Alternateur Triphasé Modèles À Réactance Constante: Réaliser Par: Hassine Abir Classe & Filiére & GroupeSarra SdiriNoch keine Bewertungen
- Expériences et observations sur l'électricité faites à Philadelphie en AmériqueVon EverandExpériences et observations sur l'électricité faites à Philadelphie en AmériqueNoch keine Bewertungen
- La théorie des jeux: Thrillers judiciaires de Katerina Carter, #2Von EverandLa théorie des jeux: Thrillers judiciaires de Katerina Carter, #2Noch keine Bewertungen
- Moteur Vortex: Créer une tornade de feu dans les turbines pour plus d'énergieVon EverandMoteur Vortex: Créer une tornade de feu dans les turbines pour plus d'énergieNoch keine Bewertungen
- Twistronics: Le saint graal de la physique, des matériaux quantiques et des nanotechnologiesVon EverandTwistronics: Le saint graal de la physique, des matériaux quantiques et des nanotechnologiesNoch keine Bewertungen
- Repères pour l'éthique professionnelle des enseignantsVon EverandRepères pour l'éthique professionnelle des enseignantsNoch keine Bewertungen
- Automate 1111Dokument8 SeitenAutomate 1111Yassine LazragNoch keine Bewertungen
- Bac 2015Dokument14 SeitenBac 2015Junior JuniorNoch keine Bewertungen
- FRANÇAIS - 3.ème Trimestre - Tâche 13 - 2.ème PARTIEDokument3 SeitenFRANÇAIS - 3.ème Trimestre - Tâche 13 - 2.ème PARTIERodrigo Antunes100% (1)
- El Cielo Gris, Piano y Cuerdas - VioloncheloDokument1 SeiteEl Cielo Gris, Piano y Cuerdas - VioloncheloManuel Nazario Guerrero PérezNoch keine Bewertungen
- Bensalim AminaDokument61 SeitenBensalim Aminahalim otmaneNoch keine Bewertungen
- Israel EschatologieDokument2 SeitenIsrael EschatologiethiewinnerNoch keine Bewertungen
- Histoire de La Littérature Grecque - T. 7Dokument476 SeitenHistoire de La Littérature Grecque - T. 7Anonymous uAJEGJW4pNoch keine Bewertungen
- Formats de ModulationDokument30 SeitenFormats de ModulationBelhamidi Mohammed Houssame100% (1)
- I/ La Poésie Sert À Exprimer Des Sentiments PersonnelsDokument3 SeitenI/ La Poésie Sert À Exprimer Des Sentiments PersonnelsDemba BANoch keine Bewertungen
- Angular 4Dokument32 SeitenAngular 4sadok chemliNoch keine Bewertungen
- TP1 Gnuplot-CDokument2 SeitenTP1 Gnuplot-CChrist TshitandaNoch keine Bewertungen
- WKMS - FrenchDokument37 SeitenWKMS - Frenchmyrrhe EdickiNoch keine Bewertungen
- Cours AlgorithmeDokument63 SeitenCours AlgorithmeFjHamza LwfNoch keine Bewertungen
- Guide de Démarrage Rapide D'affinity Photo 2 (Bureau)Dokument3 SeitenGuide de Démarrage Rapide D'affinity Photo 2 (Bureau)jriviereNoch keine Bewertungen
- Utilisation Des BD (SQL DDL)Dokument32 SeitenUtilisation Des BD (SQL DDL)Vlad-Ștefan NechitaNoch keine Bewertungen
- Langue La Voix Passive 1Dokument9 SeitenLangue La Voix Passive 1Mohamed Helmi ChebbiNoch keine Bewertungen
- Chapitre 2-3 Simplification Fonction Logique-2Dokument9 SeitenChapitre 2-3 Simplification Fonction Logique-2ycqrb9thmsNoch keine Bewertungen
- Les PrepositionsDokument2 SeitenLes PrepositionsmaïouzeNoch keine Bewertungen
- IntranetDokument67 SeitenIntranetNejm Nejme100% (1)
- Chapitre 1Dokument17 SeitenChapitre 1Letissa Abi MoussaNoch keine Bewertungen
- Guillaume de MachautDokument4 SeitenGuillaume de MachautMaryse djnNoch keine Bewertungen
- Corr - TP Logique BooleenneDokument4 SeitenCorr - TP Logique Booleennevalou cnNoch keine Bewertungen
- Devoir 1 JavaDokument3 SeitenDevoir 1 Javaaqil_hchNoch keine Bewertungen
- 14 Les AdverbesDokument1 Seite14 Les AdverbesEddalili FatimaNoch keine Bewertungen