Das könnte Ihnen auch gefallen
- Génération de maillage: Avancées et applications dans la génération de maillage de vision par ordinateurVon EverandGénération de maillage: Avancées et applications dans la génération de maillage de vision par ordinateurNoch keine Bewertungen
- Matrice fondamentale de la vision par ordinateur: S'il vous plaît, suggérez un sous-titre pour un livre intitulé « Matrice fondamentale de la vision par ordinateur » dans le domaine de la « Vision par ordinateur ». Le sous-titre suggéré ne doit pas contenir de ':'.Von EverandMatrice fondamentale de la vision par ordinateur: S'il vous plaît, suggérez un sous-titre pour un livre intitulé « Matrice fondamentale de la vision par ordinateur » dans le domaine de la « Vision par ordinateur ». Le sous-titre suggéré ne doit pas contenir de ':'.Noch keine Bewertungen
- La Cinématique 2021Dokument12 SeitenLa Cinématique 2021ets.cad2008Noch keine Bewertungen
- Camera Mw2004Dokument8 SeitenCamera Mw2004topjobNoch keine Bewertungen
- CI9 2 CapsuleuseDokument8 SeitenCI9 2 CapsuleuseNessNoch keine Bewertungen
- Dmu KinematicsDokument12 SeitenDmu KinematicsCarlosSilvaNoch keine Bewertungen
- Dmu KinematicsDokument15 SeitenDmu KinematicsHatem MaazoulNoch keine Bewertungen
- TP Assemblage Et Simulation D'une VanneDokument10 SeitenTP Assemblage Et Simulation D'une Vannetiten tiNoch keine Bewertungen
- TP N 1. Initiation Sur Automation StudioDokument9 SeitenTP N 1. Initiation Sur Automation StudioYounes JijelNoch keine Bewertungen
- Tp1 Initiation Sur Automation StudioDokument9 SeitenTp1 Initiation Sur Automation StudioismailNoch keine Bewertungen
- tp1 Initiation Sur Automation Studio PDFDokument9 Seitentp1 Initiation Sur Automation Studio PDFMohamed SomaiNoch keine Bewertungen
- TP Simulation Et PIDDokument9 SeitenTP Simulation Et PIDSahbi KraiemNoch keine Bewertungen
- TP2 CapteursDokument4 SeitenTP2 Capteursyoussef_dablizNoch keine Bewertungen
- 513825Dokument27 Seiten513825KOONoch keine Bewertungen
- Openmeca, Simulation MécaniqueDokument8 SeitenOpenmeca, Simulation MécaniqueHibatallah El krichiNoch keine Bewertungen
- TP Simulink Partie 1 1. ObjectifsDokument10 SeitenTP Simulink Partie 1 1. Objectifsrdngillia1Noch keine Bewertungen
- Tp2 Simulation Systemes Logiciel Matlab SimulinkDokument4 SeitenTp2 Simulation Systemes Logiciel Matlab SimulinkMaryem KhadraouyNoch keine Bewertungen
- Animation Na FrancuskomDokument16 SeitenAnimation Na Francuskomgego477Noch keine Bewertungen
- 654 PDFDokument42 Seiten654 PDFAchraf El aouameNoch keine Bewertungen
- Etude Cinématique Du Bras de Robot Maxpid: I. ContexteDokument6 SeitenEtude Cinématique Du Bras de Robot Maxpid: I. ContexteSiwar MbarekNoch keine Bewertungen
- Logisim 1Dokument4 SeitenLogisim 1Yassine ChahidNoch keine Bewertungen
- Lorichon Sullivan 20010819 Memoire E62Dokument12 SeitenLorichon Sullivan 20010819 Memoire E62banana-sulliNoch keine Bewertungen
- TP Cinématique SW - Bride Pneumatique V2Dokument4 SeitenTP Cinématique SW - Bride Pneumatique V2Estébane HorentNoch keine Bewertungen
- Asservissement Cour 0Dokument4 SeitenAsservissement Cour 0drizihamzaNoch keine Bewertungen
- Projet Matlab0607S2Dokument8 SeitenProjet Matlab0607S2Feno RamanantsoaNoch keine Bewertungen
- Rapport Pgrand Projet PDFDokument25 SeitenRapport Pgrand Projet PDFBourrasNoch keine Bewertungen
- Tutoriel - Mise en Service Positionnement Modulo - 603cfc366b1b9Dokument30 SeitenTutoriel - Mise en Service Positionnement Modulo - 603cfc366b1b9Denis RocheNoch keine Bewertungen
- CC AutosysDokument3 SeitenCC AutosysCollins Essimbe MeyoNoch keine Bewertungen
- Mini Manuel OpenmecaDokument8 SeitenMini Manuel OpenmecaverdosNoch keine Bewertungen
- Utt - Rapport Ma13 - Abaqus PDFDokument19 SeitenUtt - Rapport Ma13 - Abaqus PDFLeksir KamiliaNoch keine Bewertungen
- 1-TP N°1-Etude Cinématique Du Système Essuie-GlaceDokument6 Seiten1-TP N°1-Etude Cinématique Du Système Essuie-Glacelynda jerbiaNoch keine Bewertungen
- SysML. Applications Et TDDokument13 SeitenSysML. Applications Et TDhangryNoch keine Bewertungen
- TP Info Barriere PeageDokument6 SeitenTP Info Barriere PeageSamir abidiNoch keine Bewertungen
- Tutoriel - Mise en Route Positionnement Par Tableau - 603cf62629f68Dokument31 SeitenTutoriel - Mise en Route Positionnement Par Tableau - 603cf62629f68Denis RocheNoch keine Bewertungen
- Polycopie TP-SimulinkDokument11 SeitenPolycopie TP-SimulinkOussama OussamaNoch keine Bewertungen
- TP4 Simulation Comportement DroneDokument12 SeitenTP4 Simulation Comportement DroneRock AsmaeNoch keine Bewertungen
- TP de Simulation Des Systèmes Asservis (Logiciel MATLAB - SIMULINK)Dokument7 SeitenTP de Simulation Des Systèmes Asservis (Logiciel MATLAB - SIMULINK)Oussama EttahiriNoch keine Bewertungen
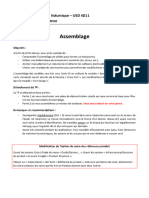
- CAO Volumique TP3 2007 08Dokument6 SeitenCAO Volumique TP3 2007 08Glody FwasaNoch keine Bewertungen
- 6117 Enonce DaeDokument5 Seiten6117 Enonce DaenajibNoch keine Bewertungen
- Rap Final VHDLDokument18 SeitenRap Final VHDLKanouni OussamaNoch keine Bewertungen
- Exxercices Corrigés - CP - ArbaouiDokument15 SeitenExxercices Corrigés - CP - ArbaouiNico La TeslaNoch keine Bewertungen
- Auro1a1 TPDokument5 SeitenAuro1a1 TPMed Ramy Gaddem EssefiNoch keine Bewertungen
- Mini Projet en Automatisme CrrectionDokument41 SeitenMini Projet en Automatisme CrrectionJB Aya AmineNoch keine Bewertungen
- Guide Simulink 2Dokument4 SeitenGuide Simulink 2Ohm AmineNoch keine Bewertungen
- Compte Rendu Commande SuperviséeDokument14 SeitenCompte Rendu Commande SuperviséeSTAIK ABOBONoch keine Bewertungen
- 09 MajoriccDokument26 Seiten09 MajoriccKaziiLaggounNoch keine Bewertungen
- Rap Final VHDLDokument18 SeitenRap Final VHDLKanouni Oussama0% (1)
- Présentation TournageDokument26 SeitenPrésentation TournageRanya ouherrouNoch keine Bewertungen
- Essais de Flexion: Figure 1 Poutre Encastrée Avec Une Force ConcentréeDokument5 SeitenEssais de Flexion: Figure 1 Poutre Encastrée Avec Une Force Concentréemaryam maryomaNoch keine Bewertungen
- S3 TP1 MaxpidDokument4 SeitenS3 TP1 MaxpidSiwar MbarekNoch keine Bewertungen
- Exercice About Using Solid WorkDokument42 SeitenExercice About Using Solid WorkTiêu TrúcNoch keine Bewertungen
- TP Lego v5Dokument10 SeitenTP Lego v5Yassine BoutahirNoch keine Bewertungen
- TPautomatismeDokument4 SeitenTPautomatismeRAZIQ YOUSSEFNoch keine Bewertungen
- Simulations EntretoiseDokument11 SeitenSimulations EntretoiseNader Farhat100% (1)
- Asservessemenet de La Vitesse Lineaire 10 PDFDokument28 SeitenAsservessemenet de La Vitesse Lineaire 10 PDFImmamHadramy100% (2)
- Rapport 20-SimDokument9 SeitenRapport 20-SimElnBEKKARYNoch keine Bewertungen
- 41 Tutorial Assemblage Bielle PistonDokument7 Seiten41 Tutorial Assemblage Bielle PistonAbdessamad Kobb0% (1)
- Détection de collision: Comprendre les intersections visuelles en vision par ordinateurVon EverandDétection de collision: Comprendre les intersections visuelles en vision par ordinateurNoch keine Bewertungen
- Traité d'économétrie financière: Modélisation financièreVon EverandTraité d'économétrie financière: Modélisation financièreNoch keine Bewertungen
- Mieux maîtriser PowerPoint: Un outil de familiarisation au logiciel de présentation PowerPointVon EverandMieux maîtriser PowerPoint: Un outil de familiarisation au logiciel de présentation PowerPointNoch keine Bewertungen
- Annexe 1: La Roue de La Vie: ExempleDokument2 SeitenAnnexe 1: La Roue de La Vie: ExempleslimamriNoch keine Bewertungen
- Cours Cycle de Vie 2Dokument100 SeitenCours Cycle de Vie 2slimamriNoch keine Bewertungen
- Cours - Analyse FonctionnelleDokument17 SeitenCours - Analyse FonctionnelleslimamriNoch keine Bewertungen
- Presentation AFDokument18 SeitenPresentation AFslimamri100% (1)
- Analyfonct LampebureauDokument16 SeitenAnalyfonct LampebureauslimamriNoch keine Bewertungen
- Catalogue PugDokument24 SeitenCatalogue PugslimamriNoch keine Bewertungen
- Analyse FonctionnelleDokument16 SeitenAnalyse FonctionnelleslimamriNoch keine Bewertungen
- iTALC 106 - Mise en Place Dans Un ReseauDokument10 SeiteniTALC 106 - Mise en Place Dans Un ReseauslimamriNoch keine Bewertungen
- MetauxalliagesDokument36 SeitenMetauxalliagesataraxy1997Noch keine Bewertungen
- DUT GMP Apprentissage Ville D AvrayDokument13 SeitenDUT GMP Apprentissage Ville D AvrayslimamriNoch keine Bewertungen
- Forces2 PDFDokument14 SeitenForces2 PDFslimamriNoch keine Bewertungen
- Sciences de L IngenieurDokument200 SeitenSciences de L Ingenieurntayoub25% (4)
- Unité Transmettre 1 STE - Partie 2Dokument50 SeitenUnité Transmettre 1 STE - Partie 2Boulette Moulay Hfid96% (24)
- Dessin TechniqueDokument30 SeitenDessin TechniqueOssama Mengade100% (11)
- FadscdscDokument4 SeitenFadscdscjose mariaNoch keine Bewertungen
- Cours Plomberie - Chauffage CentralDokument208 SeitenCours Plomberie - Chauffage CentralHamza CHAFI100% (1)
- Mini Projet ConstructionDokument102 SeitenMini Projet ConstructionDjibril DiakiteNoch keine Bewertungen
- Dossier Lrar VignalDokument13 SeitenDossier Lrar VignalCyril DELACOURNoch keine Bewertungen
- Machines À Sous Et Jackpots ProgressifsDokument2 SeitenMachines À Sous Et Jackpots ProgressifsRemy MitheNoch keine Bewertungen
- Catalogue 2013 / 2014 Maison LéonardDokument48 SeitenCatalogue 2013 / 2014 Maison LéonardmaisonleonardNoch keine Bewertungen
- 1ère Dissertation 1 Dynamisme Démographique Et Qualité de La Vie (Corrigé)Dokument2 Seiten1ère Dissertation 1 Dynamisme Démographique Et Qualité de La Vie (Corrigé)ANE100% (3)
- Rédiger Avec Succès Lettres, E-Mail Et Documents Administratifs Édition 2016Dokument215 SeitenRédiger Avec Succès Lettres, E-Mail Et Documents Administratifs Édition 2016younes kheloufiNoch keine Bewertungen
- Travaux Pratiques 3 5 1 Frame Relay de BDokument23 SeitenTravaux Pratiques 3 5 1 Frame Relay de BwissemNoch keine Bewertungen
- TP de ThermocoupleDokument11 SeitenTP de Thermocouplewaei100% (5)
- Appel Candidature DoctoratDokument1 SeiteAppel Candidature DoctoratAbdou KarimNoch keine Bewertungen
- Fang Ntoumou A4 0Dokument4 SeitenFang Ntoumou A4 0Gaëlle BaillyNoch keine Bewertungen
- Premieres Missions - Campagne L5ADokument192 SeitenPremieres Missions - Campagne L5Aokadus100% (1)
- Td108lignes Fibres Optiques CorrigeDokument1 SeiteTd108lignes Fibres Optiques Corrigesevemasse100% (2)
- Rapport OWASPDokument23 SeitenRapport OWASPnour.barrani2019Noch keine Bewertungen
- TP de Base de Biologie PropreDokument6 SeitenTP de Base de Biologie PropreKévin AshuzaNoch keine Bewertungen
- 13-408 Reb303Dokument98 Seiten13-408 Reb303Felipe CamusNoch keine Bewertungen
- Série 1 .Dokument7 SeitenSérie 1 .Agnaou MohamedNoch keine Bewertungen
- Liste Des Personnage Du ScenarioDokument4 SeitenListe Des Personnage Du Scenarioputana grosNoch keine Bewertungen
- Liste de Propriétés D'un Matériau - WikipédiaDokument6 SeitenListe de Propriétés D'un Matériau - Wikipédiadeedgi100% (1)
- Chapitre 7 MMCDokument8 SeitenChapitre 7 MMCSarah Med100% (1)
- Parametrage COVADISDokument4 SeitenParametrage COVADISimaNoch keine Bewertungen
- 2 Transformateur ParfaitDokument27 Seiten2 Transformateur ParfaitMOHAMED BOUKERYMNoch keine Bewertungen
- 6 Estimation Du Cout de ProductionDokument61 Seiten6 Estimation Du Cout de ProductionZalfeni Aymen0% (1)
- TP 4 - La RSEDokument1 SeiteTP 4 - La RSEhugo.gloaguen44Noch keine Bewertungen
- Biotransformation KhaoulaDokument166 SeitenBiotransformation KhaoulaKhaoula KouloughliNoch keine Bewertungen
- Plan DaffairesDokument32 SeitenPlan DaffairesScribdTranslationsNoch keine Bewertungen
- Cours 7 Architecture Des 19e Et 20e Siècles-Converti-1 PDFDokument7 SeitenCours 7 Architecture Des 19e Et 20e Siècles-Converti-1 PDFWind SentNoch keine Bewertungen
- Loussaut Elisabeth L As de CoeurDokument2 SeitenLoussaut Elisabeth L As de CoeurWhizeArt 笨蛋Noch keine Bewertungen
- Contribution de La Theorie Socio-Economique Des Organisations A L'audit SocialDokument13 SeitenContribution de La Theorie Socio-Economique Des Organisations A L'audit SocialLounnaSoumyaAlilatNoch keine Bewertungen