Das könnte Ihnen auch gefallen
- Fibrilación y Flúter AuricularesDokument21 SeitenFibrilación y Flúter AuricularesHarry PradoNoch keine Bewertungen
- Introducción A La Biología de Las CélulasDokument1 SeiteIntroducción A La Biología de Las CélulasHarry PradoNoch keine Bewertungen
- NeprhologyDokument1 SeiteNeprhologyHarry PradoNoch keine Bewertungen
- PediatricsDokument1 SeitePediatricsHarry PradoNoch keine Bewertungen
- Arritmias Sinusales y AuricularesDokument6 SeitenArritmias Sinusales y AuricularesHarry PradoNoch keine Bewertungen
- Microtransporte A Través de La Membrana PlasmáticaDokument1 SeiteMicrotransporte A Través de La Membrana PlasmáticaHarry PradoNoch keine Bewertungen
- T 8 NeuronalesDokument19 SeitenT 8 NeuronalesCarlos ChaconNoch keine Bewertungen
- Arritmias Cardíacas Tratamiento GeneralDokument8 SeitenArritmias Cardíacas Tratamiento GeneralHarry PradoNoch keine Bewertungen
- Arritmias Por Alteración en La Conducción Del ImpulsoDokument3 SeitenArritmias Por Alteración en La Conducción Del ImpulsoHarry PradoNoch keine Bewertungen
- Tut RedesNeuroDokument47 SeitenTut RedesNeurojacasherNoch keine Bewertungen
- Medical ForenseDokument2 SeitenMedical ForenseHarry PradoNoch keine Bewertungen
- Anonimo - El Libro Hacker PDFDokument163 SeitenAnonimo - El Libro Hacker PDFMauricio TorresNoch keine Bewertungen
- Edema Agudo de Pulmón CardiogénicoDokument5 SeitenEdema Agudo de Pulmón CardiogénicoHarry PradoNoch keine Bewertungen
- Tut RedesNeuroDokument47 SeitenTut RedesNeurojacasherNoch keine Bewertungen
- t4 Control Pid IntroduccionDokument26 Seitent4 Control Pid IntroduccionJohana ReyesNoch keine Bewertungen
- Inteligencia Artificial PDFDokument20 SeitenInteligencia Artificial PDFDaniel ZavaletaNoch keine Bewertungen
- Hochel Matej & Gomez Emilio Inteligencia Artificial PDFDokument14 SeitenHochel Matej & Gomez Emilio Inteligencia Artificial PDFSilvia M. EsparzaOviedoNoch keine Bewertungen
- Networkx 2Dokument10 SeitenNetworkx 2Julian CandianiNoch keine Bewertungen
- R16 Riai 042 Agrupa PreprintDokument10 SeitenR16 Riai 042 Agrupa PreprintHarry PradoNoch keine Bewertungen
- Articulo Informatica 5Dokument6 SeitenArticulo Informatica 5natalia1258Noch keine Bewertungen
- Hack X Crack Malware Parte1Dokument44 SeitenHack X Crack Malware Parte1FL Erick F100% (1)
- Ingenieria Social - Hack04ndalusDokument27 SeitenIngenieria Social - Hack04ndalusdj-09Noch keine Bewertungen
- Anonimo - El Libro Hacker PDFDokument163 SeitenAnonimo - El Libro Hacker PDFMauricio TorresNoch keine Bewertungen
- Clustering 2Dokument38 SeitenClustering 2Harry PradoNoch keine Bewertungen
- Fibra Optica 4 PDFDokument24 SeitenFibra Optica 4 PDFHarry PradoNoch keine Bewertungen
- Monografia FinalmetodosDokument30 SeitenMonografia FinalmetodosHarry PradoNoch keine Bewertungen
- Hebuterne Sylvain Y Perochon Sebastien - Android - Guia de Desarrollo de Aplicaciones para Smartphones Y Tabletas (2a Edicion) PDFDokument338 SeitenHebuterne Sylvain Y Perochon Sebastien - Android - Guia de Desarrollo de Aplicaciones para Smartphones Y Tabletas (2a Edicion) PDFjuanNoch keine Bewertungen
- 2 Descripcion Del RobotDokument11 Seiten2 Descripcion Del RobotHarry PradoNoch keine Bewertungen
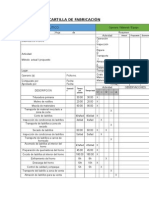
- Cartilla de FabricaciónDokument2 SeitenCartilla de FabricaciónHarry PradoNoch keine Bewertungen
- EstabilidadDokument2 SeitenEstabilidadIvan ParraNoch keine Bewertungen
- Electro Valvula Genebre 5 Vias 2 PosicionesDokument3 SeitenElectro Valvula Genebre 5 Vias 2 PosicionesJavier LeeNoch keine Bewertungen
- Proyecto MiniDokument176 SeitenProyecto MiniCarlos De La Rosa SanchezNoch keine Bewertungen
- Biografía de Ricardo ArjonaDokument3 SeitenBiografía de Ricardo ArjonaUsuario GratisNoch keine Bewertungen
- Entregable Chasis 2Dokument11 SeitenEntregable Chasis 2ronal floresNoch keine Bewertungen
- T&C 2Dokument8 SeitenT&C 2Mujeog KwanNoch keine Bewertungen
- Generalidades HidraulicaDokument4 SeitenGeneralidades HidraulicaRicardo0% (1)
- Nqdi Postproceso-Brochure SPADokument3 SeitenNqdi Postproceso-Brochure SPADiamantesexNoch keine Bewertungen
- Semana 10 - Automatización Por Módulo Lógico ProgramableDokument30 SeitenSemana 10 - Automatización Por Módulo Lógico Programablejulio angelNoch keine Bewertungen
- Práctica 4 Técnicas Electroanalíticas CuestionarioDokument3 SeitenPráctica 4 Técnicas Electroanalíticas CuestionarioJeff CalugullinNoch keine Bewertungen
- Ficha Técnica ECO KIT Tira de LED ESDokument2 SeitenFicha Técnica ECO KIT Tira de LED ESMercantil LeonNoch keine Bewertungen
- NRF-127-PEMEX-2007 Agua de Mar Vs IncendioDokument77 SeitenNRF-127-PEMEX-2007 Agua de Mar Vs IncendioGabriel MarquezNoch keine Bewertungen
- TVguiadescodificadorOrangeTV PDFDokument12 SeitenTVguiadescodificadorOrangeTV PDFM Amparo Ll MNoch keine Bewertungen
- Tramos de Una SubestaciónDokument5 SeitenTramos de Una SubestaciónOrlando Martín100% (1)
- Industrias Patria: Ficha Tecnica 3018Dokument5 SeitenIndustrias Patria: Ficha Tecnica 3018patriacolombiaNoch keine Bewertungen
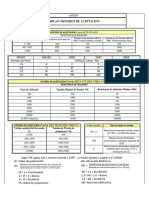
- Tablas de AceptaciónDokument1 SeiteTablas de AceptaciónSebastian Iturra MuñozNoch keine Bewertungen
- Presentacion Metodos de Analisis PDFDokument54 SeitenPresentacion Metodos de Analisis PDFAsiatico xXxNoch keine Bewertungen
- Pantallas GLCD Con Pic'sDokument4 SeitenPantallas GLCD Con Pic'sMoises Abraham Villalba RojasNoch keine Bewertungen
- Cuestionario Capitulo 4Dokument3 SeitenCuestionario Capitulo 4Ariel0% (1)
- Segmentos Espacial y TerrestreDokument182 SeitenSegmentos Espacial y TerrestreHenry CochaNoch keine Bewertungen
- Guia - 4 - Cambiadores de NivelDokument4 SeitenGuia - 4 - Cambiadores de NivelAlbert Osorio GalegoNoch keine Bewertungen
- Manual FocusDokument217 SeitenManual FocusLuis Lopez80% (10)
- Quinto Seminario-Formulación y Nomenclatura InorgánicaDokument4 SeitenQuinto Seminario-Formulación y Nomenclatura InorgánicaCarlos Alfonso Jara BenitesNoch keine Bewertungen
- Laboratorio N°1-Electronica de PotenciaDokument12 SeitenLaboratorio N°1-Electronica de PotenciaRicardo OliveraNoch keine Bewertungen
- Que Es Un Sensor MagneticoDokument7 SeitenQue Es Un Sensor MagneticoBrayanArguetaHernandezNoch keine Bewertungen
- Programación de Dispositivos Bluetooth A Través de JavaDokument5 SeitenProgramación de Dispositivos Bluetooth A Través de JavapaKoSTeNoch keine Bewertungen
- Sistema de Frenos Electrónico (EBS)Dokument14 SeitenSistema de Frenos Electrónico (EBS)Elvis_Jonathan_389263% (8)
- AUDIOMETRODokument10 SeitenAUDIOMETROMartha Isabel SalazarNoch keine Bewertungen
- Circuitos Digitales UNIDAD - I PDFDokument52 SeitenCircuitos Digitales UNIDAD - I PDFPrinziipito EmvnuelNoch keine Bewertungen
- DIGITA VERTICAL ARRAY Dva 2009Dokument11 SeitenDIGITA VERTICAL ARRAY Dva 2009Numa Marcial GaiborNoch keine Bewertungen
- Física cuántica para principiantes: Descubra los fundamentos de la mecánica cuántica y cómo afecta al mundo en que vivimos a través de todas sus teorías más famosasVon EverandFísica cuántica para principiantes: Descubra los fundamentos de la mecánica cuántica y cómo afecta al mundo en que vivimos a través de todas sus teorías más famosasBewertung: 5 von 5 Sternen5/5 (4)
- El Tao de la física: Una exploración de los paralelismos entre la física moderna y el misticismo orientalVon EverandEl Tao de la física: Una exploración de los paralelismos entre la física moderna y el misticismo orientalBewertung: 5 von 5 Sternen5/5 (3)
- Mentalidades matemáticas: Cómo liberar el potencial de los estudiantes mediante las matemáticas creativas, mensajes inspiradores y una enseñanza innovadoraVon EverandMentalidades matemáticas: Cómo liberar el potencial de los estudiantes mediante las matemáticas creativas, mensajes inspiradores y una enseñanza innovadoraBewertung: 4.5 von 5 Sternen4.5/5 (5)
- NIKOLA TESLA: Mis Inventos - AutobiografiaVon EverandNIKOLA TESLA: Mis Inventos - AutobiografiaBewertung: 4.5 von 5 Sternen4.5/5 (2)
- La Teoría de Conjuntos y los Fundamentos de las MatemáticasVon EverandLa Teoría de Conjuntos y los Fundamentos de las MatemáticasBewertung: 5 von 5 Sternen5/5 (1)
- Didáctica de la matemática en la escuela primariaVon EverandDidáctica de la matemática en la escuela primariaBewertung: 2.5 von 5 Sternen2.5/5 (3)
- Enseñar Matemática hoy: Miradas, sentidos y desafíosVon EverandEnseñar Matemática hoy: Miradas, sentidos y desafíosBewertung: 5 von 5 Sternen5/5 (1)
- Fundamentos de matemática: Introducción al nivel universitarioVon EverandFundamentos de matemática: Introducción al nivel universitarioBewertung: 3 von 5 Sternen3/5 (9)
- Guía práctica para la refracción ocularVon EverandGuía práctica para la refracción ocularBewertung: 5 von 5 Sternen5/5 (2)
- Armónicas en Sistemas Eléctricos IndustrialesVon EverandArmónicas en Sistemas Eléctricos IndustrialesBewertung: 4.5 von 5 Sternen4.5/5 (12)
- Sanación por Cristales - La guía definitiva para principiantes: Descubre el poder de los cristales curativos, piedras y minerales para la salud y la felicidadVon EverandSanación por Cristales - La guía definitiva para principiantes: Descubre el poder de los cristales curativos, piedras y minerales para la salud y la felicidadBewertung: 4.5 von 5 Sternen4.5/5 (14)
- Fundamentos de mecánica de fluidos.: Con ejercicios parcialmente resueltosVon EverandFundamentos de mecánica de fluidos.: Con ejercicios parcialmente resueltosNoch keine Bewertungen
- Había una vez el átomo: O cómo los científicos imaginan lo invisibleVon EverandHabía una vez el átomo: O cómo los científicos imaginan lo invisibleBewertung: 5 von 5 Sternen5/5 (3)
- Convertidores conmutados de potencia: Test de autoevaluaciónVon EverandConvertidores conmutados de potencia: Test de autoevaluaciónBewertung: 5 von 5 Sternen5/5 (1)
- Física paso a paso: Más de 100 problemas resueltosVon EverandFísica paso a paso: Más de 100 problemas resueltosBewertung: 4 von 5 Sternen4/5 (12)
- Mi proyecto escolar Matemáticas Lúdicas: Adaptaciones curriculares para preescolar, primaria y secundariaVon EverandMi proyecto escolar Matemáticas Lúdicas: Adaptaciones curriculares para preescolar, primaria y secundariaBewertung: 5 von 5 Sternen5/5 (5)
- Aventuras de un duende en el mundo de las matemáticasVon EverandAventuras de un duende en el mundo de las matemáticasBewertung: 5 von 5 Sternen5/5 (1)
- Proyectos de instalaciones eléctrica de baja tensiónVon EverandProyectos de instalaciones eléctrica de baja tensiónBewertung: 5 von 5 Sternen5/5 (1)