Beruflich Dokumente
Kultur Dokumente
Digital Exciter
Hochgeladen von
KUNALJAYOriginalbeschreibung:
Copyright
Verfügbare Formate
Dieses Dokument teilen
Dokument teilen oder einbetten
Stufen Sie dieses Dokument als nützlich ein?
Sind diese Inhalte unangemessen?
Dieses Dokument meldenCopyright:
Verfügbare Formate
Digital Exciter
Hochgeladen von
KUNALJAYCopyright:
Verfügbare Formate
GEH-6375
EX2000
PWM Digital Exciter
Users Manual
EX2000
PWM Digital Exciter
Users Manual
GEH-6375
Issue Date: June 1997
These instructions do not purport to cover all details or variations in equipment, nor to provide for every
possible contingency to be met during installation, operation, and maintenance. If further information is desired
or if particular problems arise that are not covered sufficiently for the purchasers purpose, the matter should be
referred to GE Motors & Industrial Systems.
This document contains proprietary information of General Electric Company, USA and is furnished to its
customers solely to assist that customer in the installation, testing, operation, and/or maintenance of the
equipment described. This document shall not be reproduced in whole or in part nor shall its contents be
disclosed to any third party without the written approval of GE Motors & Industrial Systems.
1997 by General Electric Company, USA
All rights reserved.
Printed in the United States of America
EX2000 PWM Digital Exciter GEH-6375
a
SAFETY SYMBOL LEGEND
WARNING
Indicates a procedure, practice, condition, or statement that, if not strictly observed, could result in
personal injury or death.
CAUTION
Indicates a procedure, practice, condition, or statement that, if not strictly observed, could result in
damage to or destruction of equipment.
NOTE
Indicates an essential or important procedure, practice, condition, or statement.
GEH-6375 EX2000 PWM Digital Exciter
b
WARNING
This equipment contains a potential hazard of electric shock or burn. Only personnel who are
adequately trained and thoroughly familiar with the equipment and the instructions should install,
operate, or maintain this equipment.
Isolation of test equipment from the equipment under test presents potential electrical hazards. If
the test equipment cannot be grounded to the equipment under test, the test equipments case must
be shielded to prevent contact by personnel.
To minimize hazard of electrical shock or burn, approved grounding practices and procedures
must be strictly followed.
WARNING
To prevent personal injury or equipment damage caused by equipment malfunction, only
adequately trained personnel should modify any programmable machine.
EX2000 PWM Digital Exciter GEH-6375
i
TABLE OF CONTENTS
Section/Subject Page
CHAPTER 1. OVERVIEW
1-1. Description Scope ....................................... 1
1-2. Introduction................................................. 1
1-3. EX2000 System Overview.......................... 3
1-3.1. Hardware Design...................................... 3
1-3.1.1. Control Core (Regulator Module) ......... 4
1-3.1.2. Power Converter Module ...................... 5
1-3.1.3. Optional Hardware Modules ................. 5
1-3.2. Software Design....................................... 6
1-3.2.1. Software ................................................ 6
1-3.2.2. Ac and Dc Regulators............................ 6
1-3.2.3. Scaling................................................... 7
1-3.2.4. Faults ..................................................... 7
1-3.2.5. Simulator ............................................... 7
1-3.3. Human-Machine Interface........................ 8
CHAPTER 2 HARDWARE SYSTEM
DESCRIPTION
2-1. Introduction................................................. 9
2-2. Packaging .................................................... 9
2-2.1. Environmental .......................................... 9
2-2.2. Enclosure.................................................. 9
2-3. Ratings......................................................... 9
2-3.1. Input Ratings ............................................ 10
2-3.1.1. PMG Input............................................. 10
2-3.1.2. Auxiliary Bus Input ............................... 10
2-3.1.3. Bus Feed From the Generator ............... 10
2-3.1.4. Dc Input Power...................................... 10
2-3.2. Output Current Rating.............................. 10
2-3.3. Voltage Control Range............................. 11
2-3.4. Power Profile Rating................................ 11
2-4. Power Converter Hardware......................... 12
2-4.1. Ac and Dc Input Drives............................ 12
2-4.2. Dc Link and Dynamic Discharge............. 13
2-4.3. IGBT and IAXS Devices.......................... 13
2-4.4. Output Contactor MDA............................ 13
2-4.5. Output Shunt SHA.................................... 13
2-5. Control Electronics Module ........................ 14
2-5.1. TCCB (DS200TCCB) .............................. 14
2-5.2. PSCD (DS200PSCD) ............................... 14
2-5.3. GDDD (IS200GDDD).............................. 15
Section/Subject Page
2-5.4. PTCT (DS200PTCT).................................. 15
2-5.5. NTB/3TB (531X305NTB) ......................... 15
2-5.6. LTB (531X307LTB) .................................. 15
2-5.7. RTBA (DS200RTBA) ................................ 15
2-5.8. ACNA (DS200ACNA)............................... 15
2-6. Inputs and Outputs......................................... 15
2-6.1. Generator Inputs ......................................... 15
2-6.1.1. Potential Transformer Inputs................... 15
2-6.1.2. Current Transformer Inputs..................... 16
2-6.2. 4-20 MA Inputs .......................................... 16
2-6.3. Generator Line Breaker Status ................... 16
2-6.4. Generator Lock-Out Trip............................ 16
2-6.5. Additional I/O............................................. 16
CHAPTER 3 SOFTWARE SYSTEM
OVERVIEW
3-1. Introduction ................................................... 25
3-2. Configuration Tools ...................................... 25
3-3. Programmer Module...................................... 25
3-3.1. Using the Programmer................................ 25
3-3.2. Software Design ......................................... 26
3-4. Standard Function.......................................... 26
3-4.1. Automatic Voltage Regulator
(AVR) Ramp.............................................. 26
3-4.2. Automatic Voltage Regulator Setpoint ...... 26
3-4.3. Automatic Voltage Regulator..................... 26
3-4.4. Field Regulator (FVR) Ramp..................... 26
3-4.5. Field Regulator ........................................... 27
3-4.6. Under Excitation Limiter (UEL) ................ 27
3-4.7. Over Excitation Limiter (OEL) ................. 27
3-4.8. Firing Block................................................ 27
CHAPTER 4 SOFTWARE CONFIGURATION
AND SCALING
4-1. Introduction ................................................... 37
4-2. Configuration and Scaling Example.............. 37
4-2.1. Example Generator, Exciter and Regulator 37
4-2.1.1. Generator Data......................................... 37
4-2.1.2. Exciter Data............................................. 38
4-2.1.3. Regulator Data......................................... 38
GEH-6375 EX2000 PWM Digital Exciter
ii
Section/Subject Page
4-3. Generator Configuration .............................. 38
4-4. Feedback Scaling.......................................... 39
4-4.1. Generator Feedback................................... 39
4-4.1.1 Potential Transformer Failure Detector
(PFTD) Operation.................................. 40
4-4.1.2. PTFD Scaling ........................................ 40
4-4.1.3. PTFD Detection Level........................... 40
4-4.1.4. P.T.U.V.................................................. 40
4-4.2. Bridge Voltage Feedback......................... 40
4-4.3. Bridge Current Feedback.......................... 41
4-4.4. Feedback Offsets ...................................... 41
4-4.5. Instantaneous Overcurrent Trip................ 41
4-5. Regulator Scaling ........................................ 42
4-5.1. Automatic Voltage Regulating System.... 42
4-5.1.1. AVR Operation...................................... 42
4-5.1.2. REF1 Operation..................................... 42
4-5.1.3. REF1 Scaling and Configuration .......... 42
4-5.1.4. Autosetpoint Block................................ 43
4-5.1.5. Autosetpoint Block Scaling and
Configuration......................................... 43
4-5.1.6. Automatic Voltage Regulator
(AVR) Block......................................... 44
4-5.1.7. AVR Scaling and Configuration ........... 44
4-5.1.8. AVR Proportional Gain......................... 45
4-5.1.9. Integral Gain.......................................... 45
4-5.2. Under Excitation Limiter (UEL) .............. 45
4-5.2.1. UEL Operation ...................................... 45
4-5.2.2. UEL Scaling andConfiguration............. 46
4-5.2.3. UEL Curve............................................. 46
4-5.3. Reactive Current Compensator (RCC)..... 48
4-5.4. VAR/Power Factor Control...................... 49
4-5.4.1. VAR//PF Control Operation and
Configuration........................................ 49
4-5.5. Field Regulator (FVR) ............................. 50
4-5.5.1. REF2 Operation..................................... 50
4-5.5.2. REF2 Scaling and Configuration .......... 50
4-5.5.3. FVR Operation ...................................... 50
4-5.5.4. FVR Scaling .......................................... 51
4-5.5.5. Transfer Tracking Meter and Balance... 51
4-5.6. Field Current Regulator (FCR) ................ 51
4-5.6.1. Alternate FCR........................................ 52
4-5.6.2. Alternate Field Current Regulator
Scaling .................................................. 52
4-5.6.3. Primary FCR.......................................... 53
4-5.6.4. Primary Current Regulator Scaling
and Configuration................................. 53
4-6. Optional Functions Scaling and
Configuration.............................................. 54
Section/Subject Page
4-6.1. Transducer Outputs ....................................54
4-6.2. Ground Detector and Diode Fault
Monitor ......................................................55
4-6.2.1. Ground Detector and Diode Fault
Scaling and Configuration ...................... 55
4-6.3. Field Thermal Model .................................. 56
4-6.3.1. Thermal Model Operation....................... 56
4-6.3.2. Thermal Model Scaling........................... 56
CHAPTER 5 STARTUP CHECKS
5-1. Introduction ................................................... 57
5-2. EX2000 Prestart Checks................................ 57
5-2.1. Energization and Simulator Control
Checks........................................................ 57
5-3. Pre-Start Power Checks................................. 59
5-4. Initial Roll Off-Line Checks.......................... 61
5-5. On-Line Checks............................................. 62
5-6. Operator Interface.......................................... 63
5-6.1. Units with UC2000 or IOS......................... 63
5-6.2. Units with Discrete Switches and Meters... 63
CHAPTER 6 SIMULATOR SCALING AND
OPERATION
6-1. EX2000 PWM Simulator .............................. 65
6-1.1. Simulator Scaling ....................................... 65
6-1.2. Operation.................................................... 67
EX2000 PWM Digital Exciter GEH-6375
1
CHAPTER 1
OVERVIEW
1-1. DEFINITION AND SCOPE
This manual describes the EX2000 Pulse Width
Modulated (PWM) Digital Regulator for brushless
generator excitation systems. This is a
microprocessor controlled power converter that
produces controlled dc output for rotating exciter,
brushless generator applications.
This manual is intended to assist applications and
maintenance personnel in understanding the
equipment hardware and software. It also provides
initial startup information.
The manual is organized as follows:
Chapter 1 Overview
Briefly defines the EX2000 PWM regulator
with an overview of the hardware and software
design. Includes references to other manuals
and documents, one-lines and connection
diagrams.
Chapter 2 Hardware System Description
Contains specific information on system
hardware design and purpose, ratings, I/O
definition.
Chapter 3 Software System Overview
Contains specific information on software
tools, structure, functions, and one-line
representations.
Chapter 4 Software Configuration and
Scaling
Gives examples of the scaling for specific
parameters in a generic brushless regulator
generator application.
Chapter 5 Startup Checks
Contains pre-start, startup, and on-line
adjustments required during the commissioning
of the PWM regulator for a brushless excitation
system.
Chapter 6 Simulator Scaling and
Operation
Gives example simulator scaling and operation
instructions for a typical brushless regulator
generator application.
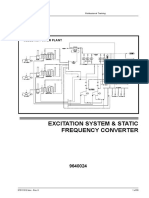
1-2. INTRODUCTION
The EX2000 PWM regulator controls the ac
terminal voltage and/or the reactive volt amperes of
the generator by controlling the field of the rotating
brushless exciter. Figure 1-1 shows a typical one-
line system of a PMG fed brushless generator
application. Power for the regulator is normally
supplied from a Permanent Magnet Generator
(PMG) driven directly by the main generator field.
This can be a single phase or three phase PMG. An
alternative method is to obtain excitation regulator
power from a Power Potential Transformer (PPT)
supplied from an auxiliary bus. This can also be a
single or three phase supply. The PPT is required to
ensure an ungrounded input to the regulator. A
second power source is also possible from a dc
battery source.
GEH-6375 EX2000 PWM Digital Exciter
2
The control system contains both a generator
terminal voltage regulator and an exciter field
current regulator. These are known as the automatic
or ac regulator and the manual or dc regulator
respectively.
When operating under control of the dc regulator, a
constant exciter field current is maintained,
regardless of the operating conditions on the
generator terminals. When operating under control
of the ac regulator, a constant generator terminal
voltage is maintained under varying load conditions.
If the generator is connected to a large system
through a low impedance tie, the generator cannot
change the system voltage appreciably. The ac
regulator, with very small variations in terminal
voltage, then controls the reactive volt amperes
(VARs).
If the generator is isolated from a system, the ac
regulator controls the terminal voltage and the
VARs are determined by the load. Most systems
operate in a manner that is between these two
extremes. That is, both VARs and volts are
controlled by the ac regulator. Normal operation is
with the ac regulator in control, with an automatic
transfer to the dc regulator in the event of loss of
potential transformer feedback as detected through
Potential Transformer Failure (PTF) or PT
Undervoltage Detection (PTFD).
In the EX2000 PWM regulator, PT Failure
Detection requires two sets of PT inputs. There is
automatic tracking between the ac and dc regulators
to ensure a bumpless transfer in either direction. A
balance signal is available for display on the
operator station or turbine control interface. A
transfer between regulators can be initiated by the
operator or, if supplied, by the PT failure detection
algorithm. In addition to the reference input to the
ac regulator summing junction, a number of both
standard and optional inputs are possible. See
section 1-3.2.2.
Besides the regulating functions, the excitation
system contains protective limiter functions, startup
and shutdown functions, and operator interfaces that
are implemented in both hardware and/or software.
The software is accessed via an RS-232C
communication link by using the SuperTool 2000
(ST2000) program or GE Controls Systems Toolbox
for Windows NT or Windows 95. These toolkits are
microprocessor based software used to configure
and maintain GEs EX2000 regulators and exciters.
It consists of a collection of programs (tools)
running under a command shell.
The EX2000 PWM regulator includes a Local Area
Network (LAN) and RS-232C interfaces for external
communication, which includes using the ST2000
toolkit that can be purchased separately.
EX2000 PWM Digital Exciter GEH-6375
3
Figure 1-1. PMG Brushless Exciter Overview
1-3. EX2000 SYSTEM OVERVIEW
1-3.1. Hardware Design
The EX2000 PWM hardware consists of a control
core and a power converter section, described in
Chapter 2. The controller includes printed wiring
boards containing programmable microprocessors
with companion circuitry, including electrically-
erasable programmable read-only memory
(EEPROM) where the regulators system blockware
pattern is stored.
The power converter consists of input disconnects
and filters, a dc link with charge control, IGBT
devices, output contactor and shunt, and control
circuitry.
There are also optional hardware devices available
on the EX2000 PWM such as 4-20 ma transducers,
Power Potential Transformers, and Field Ground
Detector Power supplies.
GEH-6375 EX2000 PWM Digital Exciter
4
1-3.1.1. CONTROL CORE (REGULATOR
MODULE). Referring to Figure 2-3 the control
core is mounted in two board racks on the outside of
the core panel and is accessible while the regulator
is operating. Also, behind the hinged outer door,
several Input/Output (I/O) boards are mounted. (See
Figure 2-4) The control core consists of all these
circuit boards interconnected by ribbon cables and
harnesses, which keep wiring to a minimum.
Detailed hardware information including fuse and
test point information, replacement instructions and
board layouts are provided in the referenced
documents for each of the following circuit boards.
Power Supply and Contactor Driver (PSCD)
Instruction Book GEI - 100241
The PSCD board creates internal power supplies and
redistributes the necessary power supply voltages
for the other control core circuit boards. An isolated
70 V dc supply is also produced and used for LTB
board inputs. The PSCD board also produces the
contactor coil voltage for the MDA output and
charge control contactor.
Gate Driver and Dynamic Discharge (GDDD)
Instruction Book GEI - 100240
The GDDD board controls the gating of the IGBTs
for bridge output and Dynamic Discharge control. It
also isolates and scales DC output, DC link voltage,
shunt feedback and heat sink temperature feedbacks.
LAN Terminal Board (LTB)
Instruction Book GEI - 100022
The LTB board provides an interface between
control devices and external devices such as
contactors, relays, indicators, lights, pushbuttons
and interlocks.
Microprocessor Application Board (TCCB)
Instruction Book GEI - 100163
The TCCB contains software transducering
algorithms that mathematically manipulate the
inputs from the isolation and scaling printed wiring
boards. These inputs are analog feedback signals
from the current and voltage transformers, which
monitor generator output and line voltage, and from
the bridge ac input and dc output voltages and shunt
feedbacks.
I/O Terminal Board (NTB/3TB)
Instruction Book GEI - 100020
The NTB/3TB board includes an RS-232C
communication port for connecting to a personal
computer (PC). The optional field ground detector
inputs are connected to the NTB board.
Drive Control and LAN Control Board (LDCC)
Instruction Book GEI - 100216
Reprogramming the LDCC board
Instruction Book GEI - 100217
The LDCC controls LAN communication and
permits operator access and control via the
Programmer keypad. It also contains the drive
control microprocessor which monitors start/stop
sequencing, alarms, trips and outer loop regulators
and motor control microprocessors which monitors
the field voltage and current regulators, gating and
overcurrent protection.
Relay Terminal Board (RTBA)
Instruction Book GEI - 100167
The RTBA board provides seven output relays with
form C contacts available for customer use which
can be driven from a remote input or directly from
the relays on the LTB board.
ARCNET Link (ACNA)
The ACNA board provides the connection point for
the ARCNET Lan communications
EX2000 PWM Digital Exciter GEH-6375
5
1-3.1.2. POWER CONVERTER MODULE
Figure 1-2. EX2000 Brushless Unit
The power conversion section consists of an input
section, a dc link, and the converter output section.
The input section is a three phase diode bridge with
input filters. The range of the ac input is from 90
volts rms up to 275 V rms. Frequency inputs range
as high as a nominal 360 hz. It can be a single phase
or three phase input from a PMG, auxiliary bus or
generator terminal fed. An input PPT is not
required for the PMG input. A PPT is required for
an auxiliary bus or generator terminal feed. An
optional voltage doubling feature is available for
units requiring higher forcing capability.
An optional backup source from nominal 125 or 250
V dc batteries is filtered, diode isolated and
combined with the three phase diode bridge output.
These sources charge the power capacitors through a
charge control resistor, RCH, which forms the dc
link portion of the power converter module. The dc
link is the unregulated source voltage for the control
core power supplies and the output power through
the IGBTs. A coarse control of the voltage level of
the dc link is provided by the dynamic discharge
circuit. This circuit will dissipate excess power
from the dc link (possible due to a regeneration
effect from the field of the rotating exciter) through
the dynamic discharge resistor, RDD. This circuit is
normally powered from the PSCD board but may be
powered through the dynamic discharge power
source resistor RDS if control power is lost.
The converter output section takes the dc link source
voltage and pulse width modulates it through the
IGBT devices. The output voltage is determined by
the following formula:
Voutput = Vinput * (time on/(time on + time off))
where Vinput is the dc link voltage, time-on is the
conduction time of the IGBT devices and time-off is
the non-conduction time of the IGBTs. The
chopping frequency of the IGBTs is approximately
1000 hz. See Figure 5-1.
This output is fed to the rotating exciter field as a
regulated voltage or current. A single pole contact
from the MDA contactor isolates the regulator from
the field. An output shunt monitors the field
current.
1-3.1.3. OPTIONAL HARDWARE MODULES.
There are a limited number of structured options
available with the EX2000 PWM regulator. Up to
GEH-6375 EX2000 PWM Digital Exciter
6
four 4-20 ma output transducers are available for
customer use. They are driven from D/A converters
located on the NTB board, and are non-adjustable
devices. Scaling is provided in the EX2000 PWM
software.
A 50/60 hz, 25 kVA Power Potential Transformer
(PPT) is available for units that are connected to an
auxiliary bus or generator output terminals. This
PPT may or may not be supplied inside the regulator
enclosure. Power to the primary should be fused per
the application notes found in the control elementary
supplied with the equipment. This transformer is
sized to supply rated excitation requirements
continuously and still be capable of operation at
ceiling excitation for a short time.
An optional Field Ground Detector Power supply
may be supplied for some systems. This power
supply provides 24 V control power to the Field
monitor unit mounted in the generator exciter
housing. A 120 V ac feed is required to power this
supply.
1-3.2. Software Design
The regulator application software consists of
modules (building blocks) combined to create the
required system functionality. Block definitions and
configuration parameters are stored in read-only
memory (ROM), while variables are stored in
random-access memory (RAM). Microprocessors
execute the code.
Diagnostic software is transparent to the user. A
Programmer module with a digital display and
keypad allows an operator to request parameter
values and self-checks.
1-3.2.1. SOFTWARE. The exciter application
software emulates traditional analog controls. The
software uses an open architecture system, which
uses a library of existing software blocks. The
blocks individually perform specific functions, such
as logical AND gates, proportional integral (P.I.)
regulators, function generators, and signal level
detectors.
These blocks are tied together in a pattern to
implement complex control functions. For example,
a control function such as the under-excitation limit
(UEL) is included as an ac regulator input by setting
software jumpers in EEPROM. The relevant
blockware is enabled by pointing the block inputs to
RAM locations where the inputs reside (the UEL
requires megawatts, kilovolts and megavars). The
UEL output is then pointed to an input of the ac
regulator summing junction. The software blocks
are sequentially implemented by the block
interpreter in an order and execution rate defined in
the ST2000 tools.
The blockware can be interrogated while running by
using the ST2000 Tools. The dynamically changing
I/O of each block can be observed in operation.
This technique is similar to tracing an analog signal
by using a voltmeter.
1-3.2.2. AC AND DC REGULATORS. The ac or
Automatic regulator and, dc or Manual regulator are
software functions again emulating traditional
analog controls. The ac regulator reference is from
a static counter and is compared to the generator
terminal voltage feedback to create an error signal.
In addition to the reference signal input to the ac
regulator summing junction, the following inputs
can be used to modify the regulator action. (The
power system stabilizer (PSS) is an optional
function.)
Reactive Current Compensation (RCC). The
generator voltage is allowed to vary in order to
improve reactive volt amp (VA) sharing between
generators connected in parallel. Generator voltage
decreases as overexcited reactive current increases,
and increases as underexcited reactive current
decreases. Alternatively it can be used to provide
line drop compensation.
Under-excitation Limit (UEL). Under-excited
VARs must be limited to prevent heating of the
generator iron core and to ensure dynamic stability
of the turbine generator. This is done by an under-
excitation limiter that takes over when a specified
limit curve is reached and prevents operation below
this limit.
EX2000 PWM Digital Exciter GEH-6375
7
CAUTION
V/Hz. The ratio of generator voltage to frequency
(V/Hz) must be limited. This prevents overfluxing
the generator and/or line-connected transformers
caused by overvoltage operation or under-frequency
operation, or a combination of the two.
Power System Stabilizer (PSS). The introduction
of a high gain, high initial response exciters can
cause dynamic stability problems in power systems.
The advantage of these exciters is to provide
improved transient stability, but this is achieved at
the cost of reduced dynamic stability and sustained
low frequency oscillations.
The PSS is fed with a synthesized speed signal
based on the integral of accelerating power. This
indicates the rotor deviation from synchronous
speed. This signal is conditioned and fed into the
summing junction of the continuously-acting ac
regulator so that under deviations in machine speed
or load, excitation is regulated as a composite
function of voltage and unit speed. The stabilizer
therefore produces a damping torque on the
generator rotor and consequently increases dynamic
stability. The PSS is an optional function.
Over-excitation Limiter (OEL). It is necessary to
limit generator excitation current off-line to prevent
overfluxing the generator and connected
transformers. On-line, it must be limited to prevent
field thermal damage. The limiting action is
performed by the excitation current regulator. The
current regulator takes control of bridge gating if the
regulator (automatic or manual) calls for a field
current that produces main generator field excitation
current in excess of a predetermined pick-up level.
The dc or manual regulator is configured as a field
current regulator using the shunt feed back as a
reference compared to the manual regulator static
adjust reference. It will maintain a constant exciter
field current based on the setpoint adjuster. The on
line and off line field current regulators are low
value gate selected with the manual regulator output
to select the appropriate firing level for the IGBT
bridge.
1-3.2.3. SCALING. It is necessary to scale the
software in each exciter for application with a
particular generator. The regulators use normalized
values of counts to represent one per unit (1 pu).
Typically 1 pu equals either 5000 or 20000 counts.
This means that the feedback value for a particular
variable, such as field voltage (VDCLINK = 1 pu)
or bridge current (AFFL = 1 pu), must be
normalized by using a multiplier to equal the
prerequisite value of counts when it is at 1 pu. See
Chapter 4 for more details.
1-3.2.4. FAULTS. The EX2000 has a
sophisticated self-diagnostic capability. If a
problem occurs, a fault code flashes in the
Programmer display showing a fault name and
number. The fault number also appears on the
display on the LDCC in coded form. GEI - 100242
includes information on fault codes, interpretation,
and troubleshooting.
1-3.2.5. SIMULATOR. Located within the core
software is a sophisticated system simulation
program that models the exciter and generator
behavior. The simulator is activated via a software
jumper in EEPROM.
The simulator physically operates the
field contactors when a start signal is
issued to the exciter. If dc link voltage
is present, current may flow in the
exciter field.
Signals representing the field and the generator
feedbacks are simulated in the TCCB and fed to the
transducering algorithms, in place of the real
feedbacks. Once the exciter is scaled for a
particular generator, the simulator uses that scaling.
For example, after a successful startup sequence is
performed in simulator mode, the operator interface
will displays the exciter voltage and current and
generator voltage applicable to that particular unit.
This tool is useful for training, startup, and
calibration checkout.
Scaling and operation of the simulator is discussed
in Chapter 6.
GEH-6375 EX2000 PWM Digital Exciter
8
1-3.3. Human - Machine Interface
Each EX2000 PWM will have a human - machine
interface (HMI) device of some form. The standard
offering will be via a data link with the turbine
controller over the Status S page and regulator
information will be obtained through the turbine
controllers HMI. Other interfaces offered may
include, but are not limited to, discrete switches and
meters, direct DCS control through a UC2000, or
some other device. Refer to the control elementary
supplied with the equipment for the devices
provided and to that devices specific instruction
book for further information.
EX2000 PWM Digital Exciter GEH-6375
9
CHAPTER 2
HARDWARE SYSTEM DESCRIPTION
2-1. INTRODUCTION
This chapter describes the EX2000 PWM regulator
hardware structure, and overall operation. When
reading these descriptions, refer to Figure 1-2, the
specific unit elementary, and the excitation layout
diagrams provided with the equipment.
2-2. PACKAGING
GEI-100228 provides information on Receiving,
Storing, and Warranty Instructions for DIRECTO-
MATIC 2000 Equipment. This document should be
consulted upon receipt of the EX2000 PWM
regulator.
Each regulator will endure the following
environmental conditions without damage or
degradation of performance.
2-2.1. Environmental
Temperature requirements for the EX2000 PWM
should be maintained within the shipping and
storage limits in GEI - 100228 during transport and
handling. Once installed, the operational limits of
an ambient temperature of 0 to +45 C, outside of
the convection cooled cabinet, should be
maintained. It is expected that the hottest board
entry temperature will be approximately 60 C
allowing the use of 70 C parts.
5 to 95% relative humidity with no external
temperature or humidity excursions that would
produce condensation should also be maintained.
The EX2000 PWM control equipment is also
designed to withstand 10 PPB of the following
contaminants:
Reactive Sulfur
Reactive Chlorine
Hydrogen Sulfide
Sulfur Dioxide
Chlorine Dioxide
Sulfuric Acid
Hydrochloric Acid
Hydrogen Chloride
Ammonia
2-2.2. Enclosure
The standard enclosure offering is a NEMA 1 or
IP20 equivalent, 90 inches high by 24 inches wide
and 20 inches deep. An optional 36 inch wide
enclosure is also available. In some instances, just
the regulator panel without enclosure will be
provided. This panel measures approximately 63
inches high by 17 inches wide by 18.5 inches deep.
Other enclosure types are available.
Estimated weight is 1200 pounds with NEMA 1, 24
inch enclosure, 900 pounds without enclosure.
Estimated watts losses are a maximum 200 watts for
all applications.
2-3. RATINGS
In the interest of producing a robust design, all
power components, including the IGBT package,
were chosen with an operating limit of at least 50 A
where practical. This overdesign of components
should provide the long life and reliability desired in
a generator excitation regulator.
Each EX2000 PWM regulator has a specific output
limit rating based on the application of the regulator
and limited by the shunt chosen for the application.
The following ratings information is the maximum
output of the standard regulator, using a 25 A shunt.
For shunt ratings other than 25 A, the output current
GEH-6375 EX2000 PWM Digital Exciter
10
limitations will be reduced proportionately. Name
plate information should be used for accurate
ratings.
2-3.1. Input Ratings
The ac input is the primary input power to the
brushless regulator. The range of input ac is from
90 V rms. up to 275 V rms. The ac input may be
single or three phase. The input ac may be from a
permanent magnet generator (PMG), customer
supplied auxiliary bus, or bus fed from the
generator.
The ac source input to the EX2000 PWM regulator
should have an impedance of 6 % nominal based on
an estimated 20 A, 10 kVA source.
2-3.1.1. PMG INPUT. The voltage and frequency
for PMG based input will start from 0 and increase
to rated as a function of generator speed. Rated
input from the PMG system can be as high as 250 V
ac rms / 360 Hz. Nominal voltages can be 100 V ac
rms up to 250 V ac rms. With overspeed conditions,
the maximum is 275 V ac rms / 440 Hz. Since the
PMG is ungrounded and is only used to source
power to the brushless regulator, no input
transformer is required.
PMG systems on gas turbines will see extended
periods of time at < 50 % speed operation on
startup. This is due to the purge cycle needed by the
gas turbine. Since the PMG may be the only input
power to the regulator, the control will initialize at
60 V ac rms (i.e. ~50% speed).
2-3.1.2. AUXILIARY BUS INPUT. Auxiliary
bus based systems require an input transformer to
isolate the input to the brushless regulator from the
customer power system. This is to insure that the
power source to the brushless regulator is
ungrounded. The transformer can be external to the
enclosure that houses the brushless regulator but
will generally be located in the panel. The
secondary voltage can range from 90 V ac rms up to
a max. 275 V ac rms. Nominal secondary voltages
can be 100 V ac rms. up to 250 V ac rms. Rated
frequency for the auxiliary bus based systems can be
50 Hz or 60 +/- 10%.
2-3.1.3. BUS FEED FROM THE
GENERATOR. Bus Fed based systems will
require an input transformer to isolate the input to
the brushless regulator from the power system. This
is also to insure that the power source to the
brushless regulator is ungrounded. The transformer
will be external to the enclosure that houses the
brushless regulator. The secondary voltage can
range from 90 V ac rms up to a max. 275 V ac rms.
Nominal secondary voltages can be 100 V ac rms up
to 250 V ac rms. Rated frequency for the bus feed
based systems can be 50 Hz or 60 +/- 10 %.
If a bus fed system is applied on a black-start gas
turbine, this input may start at 20 % of rated speed,
therefore, the voltage and frequency will start at
20 % of rated.
2-3.1.4. DC INPUT POWER. The dc source
input power is generally provided from a battery
bus. This source is a back-up to the primary ac
input power source. It can be used as the primary
input power for starting black-start turbine
generators.
The nominal battery bus voltages are based on a
110/125/ 220 / 250 V dc. Therefore, the operating
range for the dc input is from 80 V dc up to a max.
of 290 V dc.
2-3.2. Output Current Rating
The bridge is capable of delivering the following
absolute maximum output:
25 A dc continuously over the specified
temperature range
40 A dc for 20 s once every 30 minutes after
continuous operation at 25 A dc over the
specified temperature range.
The PWM bridge is monitored for excessive
temperature by a heatsink sensor. Both alarm and
trip signals are available.
EX2000 PWM Digital Exciter GEH-6375
11
2-3.3. Voltage Control Range
The PWM bridge is capable of two quadrant
operation (positive and negative output voltage,
positive current). This allows operation near zero
voltage. The PWM bridge has two active transistors
and will operate in zero vector mode. This will
allow the output voltage to be chopped in PWM
fashion from +V dc to 0 for positive voltage
commands and -V dc to 0 for negative voltage
commands. The chopping frequency is
approximately 1 khz.
The IGBT bridge does not provide a low impedance
path which would provide rectification when gating
is disabled. This prevents runaway conditions
known to occur on brushless units having rotating
diode failure. The four flyback diode structure
provides this inherently.
2-3.4. Power Profile Rating
The output power profile is a function of line
impedance, line current rating, operating point (I dc
and V dc), and capacitor current rating. Peak
current is limited by IGBT rating. In general higher
current output is available at lower output voltages.
Output current (I dc) can be higher than line current
rating. The regulator shall be capable of matching
the following power profile.
The continuous operating area is bounded by the
minimum of the capacitor limit, line limit, 25 A dc,
or maximum output curve and the x (V dc) and y
(I dc) axis.
The y axis shows input line amps (rms), capacitor
amps (rms), or output amps (dc) for a given output
V dc and I dc. The curve labeled 25 shows rms
capacitor current on the y axis for a given V dc and
25 I dc.
GEH-6375 EX2000 PWM Digital Exciter
12
0 50 100 150 200 250 300 350
0
5
10
15
20
25
30
35
25
25 Adc
Output voltage (Volts dc)
Line and capacitor currents as functions of dc voltage and current
line limit 12.5 Arms
cap limit 10 Arms
Line (A rms), capacitor (A rms), or output (A dc) current
IGBT limit
25Adc
at 50 Vdc and 25 Adc
capacitor current is
10 Arms
at 200 Vdc and
25 Adc
line current
is 15 Arms
maximum
output
Figure 2-1. Typical Power Profile
The curve labeled 25 A dc shows rms line current on
the y axis for a given output V dc and 25 I dc.
The line limit curve corresponds to given V dc and I
dc which would result in rated line current. The cap
limit curve corresponds to given V dc and I dc
which would result in rated capacitor current. The
following graph illustrates the various limits.
Negative voltage operation is not shown.
2-4. POWER CONVERTER HARDWARE
For the following discussions, elementary drawing
03A and the panel layout drawings (Figures 2-2 thru
2-5) should be used references. The elementary
sheet is typical for all applications. On a
requisition basis, the output shunt (SHA), charge
resistor (RCH), and dynamic discharge resistor
(RDS) may change. Also, various combinations of
the input source power may exist. A single phase
PMG with battery backup is assumed.
2-4.1. Ac and Dc Input Devices
The ac input device DSWAC is a three phase, 600 V
ac, 30A molded case industrial circuit breaker. For
single phase applications, the L1 and L3
connections should be used. The dc input device
DSWDC is a two phase, 250 V dc, 30 A molded
case industrial circuit breaker. These input devices
are mounted at the top of the panel, easily accessible
for operation as a disconnect during equipment
maintenance or inspection.
EX2000 PWM Digital Exciter GEH-6375
13
The ac input source is filtered by snubber RC
networks and rectified by a three phase diode bridge
(DM1, 2 and 3). The dc output of this bridge
charges capacitors C1, C2, C3, and C4, forming the
dc link. The dc supply is filtered through inductors
(LPDC and LNDC) and battery capacitor C1F. It is
then fed directly to the dc link through isolation
diode DM4. MOV1 and MOV2 are provided for
surge protection. All of these components are
located at the top of the panel, behind the ac and dc
disconnects.
2-4.2. Dc Link And Dynamic Discharge
A charge control resistor (RCH) mounted on the
heat sink assembly is provided to limit inrush
current during power up and capacitor charging.
The second pole of the MDA contactor controls
application or removal of the charge control resistor.
The dc link provides the source power for internal
board power supplies via cable DCPL to the PSCD
board. The control power supply is designed to
operate over a range of 60 to 600 V dc on the dc
link.
Auxiliary diodes DM5 allow stored energy in the
exciter to be returned to the dc link when the output
contactor MDA opens. Excessive voltage buildup in
the dc link during regeneration is controlled through
the dynamic discharge circuit. This circuit monitors
the level of the dc link and will dissipate energy
through the dynamic discharge resistor (RDD)
mounted at the top of the panel to prevent
overvoltage of the power circuit and board rack
supply. The C leg of the 3 phase IGBT pack is
controlled by the dynamic discharge circuitry on the
GDDD board. An alternate source of power for the
discharge circuit is provided through the RDS
resistor, also to the GDDD board, in the event that
control power is lost. Jumper settings on the GDDD
board set the control level of the dc link by the
dynamic discharge circuit.
2-4.3. IGBT And IAXS Devices
The dc link also provides the unregulated power
source for the Insulated Gate, Bi-polar Transistor
(IGBT) bridge used to provide the exciter field
current. The bridge consists of legs A and B of the
three phase, 50 A, 1200 V IGBT pack. Only leg A
upper and leg B lower IGBTs are active. Leg A
lower and leg B upper are permanently inactive.
Controlled by the microprocessor based digital
regulator, the leg A and B IGBTs are modulated to
pulse the dc link supply and feed the resulting
output to the field of the rotating brushless exciter.
The output voltage is determined by the following
formula:
Voutput = Vinput * (time on/(time on + time off))
where Vinput is the dc link voltage, time on is the
conduction time of the IGBT devices and time off is
the non-conduction time of the IGBTs. The
chopping frequency of the IGBTs is approximately
1000 hz.
The IAXS board provides the connection of the dc
link capacitors to the IGBT bridge, dynamic
discharge control and gate control from the GDDD
board. The IAXS board is also the connection point
for the dc output voltage and sensing feedbacks to
the control circuitry.
2-4.4. Output Contactor MDA
The output contactor MDA is described in GEK -
83756. It is a double pole, single throw, 600 V dc,
50 A contactor, isolating the positive leg of the
EX2000 PWM bridge output. The second pole is
used to remove the charge control resistor RCH.
The power for the contactor coil is provided from
the PSCD board. This voltage is only present when
the control has been commanded to run. When the
DC link voltage is not present, there is no power
available to drive this contactor.
2-4.5. Output Shunt SHA
The output current is monitored by the control via
the 100 mv feedback shunt SHA. The shunt rating
is application specific. A range from 1 A to 25 A
maximum is possible. The shunt rating must be less
than twice the exciter amps full load.
GEH-6375 EX2000 PWM Digital Exciter
14
2-5. CONTROL ELECTRONICS MODULE
The control electronics module contains powerful
programmable microprocessors with companion
circuitry, including EEPROM, to process the
application software. It is a module assembly that is
located on the front door assembly of the power
conversion module. Elementary diagram sheet A04
and Figure 2-7 shows the connections of the various
boards in the control module.
This control module assembly contains the main
processor board (LDCC), microprocessor
application board (TCCB), power supply and
contactor driver board (PSCD), and the gate driver
board (GDDD). These boards are interconnected
through ribbon cables. The following is a brief
functional description of the boards within the
exciter. Each board has a unique GEI which
documents the hardware layouts, test points, fuses
and other information for each individual board.
These are referenced in Chapter 1.
The LAN and Drive Control Board (LDCC), which
is the main processor board, provides the IGBT
gating circuit control and regulator functions
including:
Automatic voltage regulator
Field current regulator
Field current limit regulator
Volts/hertz limit regulator
Reactive current compensation
Under-excitation limit regulator
Optional functions include:
VAR/power factor regulator
Power system stabilizer
The LDCC board also contains both isolated and
non-isolated circuits for communication inputs to
the exciters controller. The LED display and
keypad programmer is on this board.
2-5.1. TCCB (DS200TCCB)
The microprocessor application board (TCCB) is
essentially a transducer board. The isolated and
scaled generator PT and CT signals are fed from the
PTCT board to the TCCB board. The TCCB uses
voltage controlled oscillators (VCOs) to transform
the analog voltage signals into digital signals.
Software transducers process the voltage and current
signals and then calculate generator data. This
information is passed to the LDCC control
processors for use by the regulators. The EX2000
PWM simulation software also resides in the TCCB.
2-5.2. PSCD (IS200PSCD)
The Power Supply and Contactor Driver board
(PSCD) is powered from the dc link via stab-on
terminals DCPL1 (+) and DCPL2 (-). The control
operates from 80 - 400 V dc as nominal range inputs.
Transient operation to 600 V dc is possible during
maximum operation of the dynamic discharge. This
board produces control power for distribution to the
other control module boards. The main supply
produces +/- 24 V, +/-15 V, and +5 V for control
boards (LDCC and TCCB, etal.) A 17.7 V ac
squarewave is distributed through high frequency
transformers to the gate driver and LTB inputs power
supplies. Auxiliary to the main supply are supplies
for generating isolated 70 V dc (sufficient to power
13 LUP inputs ) and an isolated SHVI/SHVM power
for future applications.
The contactor control power supply from the PSCD
board is sized to deliver up to 0.75 A dc. Power is
taken directly from the dc link and converted to 105
V dc by a buck converter. The enable of the MDA
contactor is via an optically coupled signal which is
logically in parallel with the coil of K1. Relay K1 is
driven from the LDCC board when the control is
commanded to run.
Relay K86 is used as the controls permissive to run
and emergency stop. Dropping out K86 will
immediately stop the EX2000 PWM regulator. Coil
voltage is from the 70 V dc power supply on the
PSCD board.
EX2000 PWM Digital Exciter GEH-6375
15
2-5.3. GDDD (IS200GDDD)
The Gate Driver and Dynamic Discharge board
(GDDD) provides the interface isolation between
the IGBTs and the main processor firing circuits.
Dynamic discharge circuit control is implemented
on the GDDD board as well as the gating circuits for
the A leg and B leg active IGBTs.
The board also provides the instrumentation of the
EX2000 PWM. Output dc voltage, dc link voltage,
shunt current mv input, and the heat sink thermistor
input are processed on the GDDD board and sent to
the LDCC processors for use by the regulators.
2-5.4. PTCT (DS200PTCT)
The Potential Transformer Current Transformer
(PTCT) board isolates and scales the voltage and
current signals from the PTs and CTs. It also
provides auxiliary inputs and outputs for either low
voltage ( 10 V dc) or 4-20 ma current signals.
Secondaries of the isolation transformers are passed
to the TCCB board via the JKK ribbon connector.
2-5.5. NTB/3TB (531X305NTB)
The NTB/3TB serves as a general purpose terminal
connection board. Connections are made as an
interface between the control core and other devices.
The EX2000 PWM RS-232C serial port is located
on this board. When supplied, the field ground
detection inputs from the ground detector receiver
are connected to the auxiliary VCO inputs on the
NTB/3TB board.
2-5.6. LTB (531X307LTB)
The LAN Terminal Board (LTB) is an I/O
termination board that serves as an interface
between the control core and other devices. Ribbon
cable RPL allows software variables pointed to the
seven low voltage, low current, form C LTB output
relays to control higher voltage, higher current, form
C RTBA board relays. Jumper settings on the
RTBA board determine if the LTB relays or external
connections operate the RTBA relays. The eight
LTB (or LUP) inputs are connected to the LDCC
board via 8PL for use by the regulator controls.
2-5.7. RTBA (DS200RTBA)
The Relay Terminal Board (RTBA) board contains
seven form C, DPDT relays that can be software
driven via the LTB pilot relays or externally driven.
The relay contact outputs are used for external
customer interface. Each relay contains an LED that
indicates when the relay is energized.
2-5.8. ACNA (DS200ACNA)
The ARCNET Board (ACNA) serves as the
connection for the ARCNET data link for the
EX2000 PWM regulator. Termination is made
using co-axial cable. Each ACNA can terminate
two co-axial cables.
The Status S data link connection to the turbine
controller is made on the ACNA board.
2-6. INPUTS AND OUTPUTS
The EX2000 PWM regulator has a limited amount
of hard inputs and outputs that can be supported.
For most applications, these will be conducted over
the Status S data link. As a minimum, the following
must be supported in the basic brushless regulator
for basic/OEM offerings.
2-6.1. Generator Inputs
2-6.1.1. POTENTIAL TRANSFORMER
INPUTS. Up to three sets of three phase PT inputs
are supported. These inputs are a nominal 120 V
secondary with software adjustments available for
other nominal secondary voltages. The inputs are
less than a 10 VA burden on the PT inputs.
The first two PT sets are used to supply generator
line voltage feedback information to the automatic
(ac) regulator for control of the generator output
GEH-6375 EX2000 PWM Digital Exciter
16
voltage. The first PT set is used for generator
control. The second set is used for PT failure
detection and can be configured for control should
the first set fail.
These inputs also supply speed / frequency feedback
information for the regulators, limiters, and
protection functions, including the optional Power
System Stabilizer (PSS).
The third set of three phase PT inputs provides line
side voltage and is used by the control for an
optional voltage matching feature. These
connections are made directly to the PTCT board.
Optional PT isolation switches for all three sets of
inputs may be supplied.
2-6.1.2. CURRENT TRANSFORMER INPUTS.
One set of two phase CT inputs is supported. Phase
A and phase C currents are required by the EX2000
PWM regulator. These CTs supply generator line
current feedback information for use by regulator,
limiters, and metering functions in the brushless
regulator control, including the optional Power
System Stabilizer (PSS). The inputs require a
nominal 5 A secondary CT input. Software
adjustments are available down to a nominal 3 A
secondary input. The CT burden is less than 1 VA
per phase. These connections are made directly to
the PTCT board.
Optional CT isolation shorting switches for each
phase input may be supplied.
2-6.2. 4 - 20 MA Inputs
Optionally, the EX2000 PWM regulator can support
two 4 to 20 milli-amp inputs for signals used to
modify the overexcitation limiter / protection based
on the cooling of the generator. On air cooled
generators this input will be proportional to the
cooling air temperature for the generator. On
hydrogen cooled generators this input will be based
on hydrogen pressure of the generator.
2-6.3. Generator Line Breaker Status
One form A contact input from the generator output
circuit breaker is used by control, limiter, and
protection functions. This contact is connected to
an LTB input. The contact may be powered using
the 70 V dc supply from the PSCD board.
2-6.4. Generator Lock-Out Trip
One form A (closed when reset) contact input from
a customer trip relay (86G typically) is supported
for an external trip of the excitation control system.
This contact must be powered from the 70 V dc
power supply on the PSCD board.
2-6.5. Additional I/O
In addition to the I/O listed above, the following
minimum inputs and outputs are supported.
Not all applications will require each of the contact
I/O or 4-20 ma inputs or outputs listed. Refer to the
job specific elementary for those supplied.
Input Regulator On / Off (Closed = Regulator On)
This is used to start and stop the brushless regulator.
Input Regulator Selector AC/DC (Closed = AC )
This is used to select the controlling regulator, auto
(AC) or manual (DC).
Input Regulator Raise (Close = Raise)
This interfaces to the active regulators reference
adjuster, ac or dc, and raises the setpoint.
Input Regulator Lower (Close = Lower)
This interfaces to the active regulators reference
adjuster, ac or dc, and lowers the setpoint.
Input PSS Enable/Off (Closed = Enable)
This contact allows the PSS control to operate if
minimum load permissives are reached.
Input Status of Control Output Contactor
This contact is used to monitor the status of the
MDA contactor.
EX2000 PWM Digital Exciter GEH-6375
17
Output Exciter Alarm (30EX)
This output provides a global exciter trouble alarm
for customer annunciation
Output Protective Transfer to dc Regulator /
Transfer Regulator alarm (60EX)
This contact provides an indication of an automatic
transfer to manual regulator
Output Regulator On
This contact provides an indication that the EX2000
PWM regulator is operating.
Output Exciter Trip Request (94EX)
This contact output is a request from the EX2000
PWM to immediately trip the generator. Usually
directed to the 86G device.
Output Exciter Field Ground Alarm/Trip (64FA or
64FT)
This contact output can be either an alarm or trip
contact depending on customer preference.
The voltage inputs supported are:
Input from Exciter Field Ground Detector Alarm
(+ 24 V)
Input from Exciter Field Ground Detector
Malfunction (+24 V)
Input from Exciter Field Ground Detector Diode
Fault (+24 volts)
Up to four 4 to 20 milli-amp outputs are also
supported.
These outputs are provided through the digital to
analog converters on the NTB/3TB board. They are
software configurable. Typical uses are regulator
output voltage, regulator output current, and
regulator balance.
GEH-6375 EX2000 PWM Digital Exciter
18
Note: Not Certified for Construction.
Figure 2-2. Mechanical Layout
EX2000 PWM Digital Exciter GEH-6375
19
Figure 2-3. Front View
GEH-6375 EX2000 PWM Digital Exciter
20
Figure 2-4. Front View (Door Removed)
EX2000 PWM Digital Exciter GEH-6375
21
Figure 2-5. Bridge Components
GEH-6375 EX2000 PWM Digital Exciter
22
Figure 2-6. Bridge Components (Isometric)
EX2000 PWM Digital Exciter GEH-6375
23
MAIN
PROCESSOR
BOARD
LDCC
MICROPROCESSOR
APPLICATION
BOARD
TCCB
POWER SUPPLY
AND
CONTACTOR DRIVER
BOARD
PSCD
GATE DRIVER AND
DYNAMIC DISCHARGE
BOARD
GDDD
PTCT
BOARD
ARCNET BOARD
ACNA
LTB RTBA NTB/3TB
POWER CONVERTER
MODULE (IGBT)
WORK
STATION
CONTACT
INPUTS
CONTACT
OUTPUTS
CONTACT
INPUTS/OUTPUTS
TO TURBINE CONTROL
OPERATOR INTERFACE
METER DRIVER
OUTPUTS QTY (4)
3 PHASE
VOLTAGE
SENSING
INPUT
2 PHASE
CURRENT
SENSING
INPUT
RS232
PORT
DC OUTPUT
TO
EXCITER FIELD
AC INPUT
DC INPUT
Figure 2-7. Typical Connection Diagram
GEH-6375 EX2000 PWM Digital Exciter
24
Notes:
EX2000 PWM Digital Exciter GEH-6375
25
CHAPTER 3
SOFTWARE SYSTEM OVERVIEW
3-1. INTRODUCTION
The EX2000 PWM regulator uses microprocessor
based software that includes adjustable parameters.
These parameters perform many functions once
controlled through adjustable hardware and software
combinations.
The parameters are modified to customize the
regulator to the specific hardware and application.
They also enable field and maintenance personnel to
fine tune the regulator for optimal performance.
Either the DOS-based ST2000 Toolkit or Windows-
based Toolbox and the LDCC board Programmer
are used for making these software adjustments.
These products are available as options from GE
Motors & Industrial Systems for use by the
customer.
The programmer is provided with each unit.
3-2. CONFIGURATION TOOLS
DOS based ST2000 and Windows-based GE
Control System Toolbox are software toolkits used
to configure, maintain, and fine tune the EX2000
PWM regulator. They consist of a collection of
programs (tools) running under a command shell on
an IBM PC-compatible computer.
The toolkit includes an extensive database of
EX2000 definitions, accessed and manipulated
using menu driven selections. Additionally, the
ST2000 program can graphically display the
exciters program logic on the computer screen. By
viewing the logic flow, the user can better
understand and manipulate the exciters adjustable
values.
ST2000 is used at the factory to initially configure
and test the systems. At the customer site, the tools
enable GE field engineers and other trained
personnel to troubleshoot, fine-tune, and maintain
the installed EX2000 PWM regulator. Optional tool
based modules provide real display of control
variables and communications data.
Publication GEH-5860 provides instructional
information about DOS ST2000. Publication GEH-
6333 provides information about the Windows-
based Toolbox. These publications also include the
PC requirements for running the tools.
3-3. PROGRAMMER MODULE
The EX2000 PWM regulator includes a Programmer
module with a 16 character digital display and an
alphanumeric keypad. It functions as an operator
interface for software adjustments and diagnostic
testing when the ST2000 Toolkit is not available.
NOTE
Permanent changes made using the
Programmer module must also be made
in the configuration tools to keep them
up to date with the exciters software
configuration. Contact GE Motors &
Industrial Systems for support in this
area.
3-3.1. Using The Programmer
Publication GEI-100242 provides information on
how to operate the Programmer module.
GEH-6375 EX2000 PWM Digital Exciter
26
3-3.2. Software Design
The exciter application program consists of
functional software modules (building blocks)
combined to perform to system requirements. Block
definitions and configuration parameters are stored
in read-only memory (ROM), while variables are
stored in random-access memory (RAM).
Microcontrollers execute the code.
The exciter application software emulates traditional
analog controls. The software uses an open
architecture system, which uses a library of existing
software blocks. The blocks individually perform
specific functions, such as logical AND gates,
proportional integral (PI) regulators, function
generators, and signal level detectors.
These blocks are tied together in a pattern to
implement complex control systems. For example, a
control function such as the under-excitation limit
(UEL) is included as an ac regulator input by setting
software jumpers in EEPROM. The relevant
blockware is enabled by pointing the block inputs to
RAM locations where the inputs reside (the UEL
requires megawatts, kilovolts and megavars). The
UEL output is then pointed to an input of the ac
regulator summing junction.
The software blocks are sequentially implemented
by the block interpreter in an order and execution
rate defined in ST2000. The blockware can be
interrogated while running by using ST2000. The
dynamically changing I/O of each block can be
observed in operation. This technique is similar to
tracing an analog signal by using a voltmeter.
3-4. STANDARD FUNCTIONS
Table 3-1 is a description of the inputs and outputs
for the more significant blocks used in the EX2000.
These inputs and outputs can be monitored through
ST2000, if desired. Also, the significant
adjustments of those functional blocks are described
as Adjustable Constants. These constants
represent limits, gains, and setpoints. They are
functionally equivalent to potentiometers or other
discrete adjustment devices used in previous
excitation systems.
3-4.1. Automatic Voltage Regulator (AVR)
Ramp
The AVR ramp block accepts an input from the
operator via the Status-S page for auto regulator
raise or lower. The reference then ramps at a
predetermined rate, within an upper and lower limit
(usually 0.9 to 1.1 pu terminal V). The output can
be preset to a value upon startup. Automatic
tracking of the AVR track value is performed when
operating in manual regulator. Refer to Figure 3-2.
3-4.2. Automatic Voltage Regulator Setpoint
The AVR setpoint block sums the output from the
reactive current compensation (RCC), AVR ramp,
UEL output, and power system stabilizer (PSS)
output. This sum is compared to the V/Hz reference
in a minimum select block and then passed through
a high limiter as the AVR output signal. By
selecting a negative or positive gain, line-drop or
droop compensation mode may be selected on the
RCC. An auto/manual command via the operator
generates auto active or manual active status
indicators. A PT failure can also select manual.
Refer to Figure 3-3.
3-4.3. Automatic Voltage Regulator
The AVR block combines the AVR setpoint with
the negative generator terminal volts to provide an
error signal. This is passed through to the automatic
regulator proportional and integral gain sub-blocks,
and then passes through the auto regulator limits to
the manual voltage regulator. The auto regulator is
modeled by the following transfer function:
AVR out = AVR error (K
p
+ K
I
)/S. See Figure 3-4.
3-4.4. Field Regulator (FVR) Ramp
The FVR ramp block accepts an input from the
operator via the Status S page for manual regulator
raise or lower. The reference then ramps at a
predetermined rate within an upper and lower limit
EX2000 PWM Digital Exciter GEH-6375
27
(usually 0.7 pu VFNL to 1.2 pu VFFL). The output
can be preset to a value upon startup. When in auto
regulator mode, the FVR ramp tracks the value of
IFE, exciter field current. Refer to Figure 3-5.
3-4.5. Field Regulator
The exciter field regulator is configured as a current
regulator in the EX2000 PWM. The reference input
to the FVR is from either the manual regulator ramp
block or the AVR. When fed from the AVR, the
field regulator is used as an inner loop. A bridge
firing enabled signal is also provided to keep the
exciter turned off until bridge firing has been
enabled. Refer to Figure 3-6.
3-4.6. Under Excitation Limiter (UEL)
The UEL blocks accept watts and volts as inputs and
calculates a VAR reference. Using a table lookup
which approximates the underexcited capability of
the generator, the VAR reference is then compared
to the actual unit VARs to develop a VAR error
signal. The error signal is then passed through a
proportional and integral regulator sub-block to keep
the machine within its underexcited capability.
Refer to Figure 3-7.
3-4.7. Over Excitation Limiter (OEL)
In the EX2000 PWM, the alternate current regulator
is initially enabled. If the signal level detect looking
at exciter field current or either of the inverse time
protection blocks activate, the alternate field current
regulator is disabled and the primary current
regulator setpoints are active. The output of either
the alternate or primary field current regulator is fed
to the firing block where a minimum select with the
field regulator firing command is performed. A cool
down function is also supplied to simulate cooling
of the field after an overexcitation condition. Refer
to Figure 3-8.
3-4.8. Firing Block
The firing block accepts the field current reference
and the field voltage reference and then selects the
least of the two. This signal is passed on to the
bridge only if the instantaneous overcurrent or the
stop commands are not activated. If either of these
are active, the firing signal is a preset retard limit.
Refer to Figure 3-9.
GEH-6375 EX2000 PWM Digital Exciter
28
Table 3-1. Standard Software Functions
Function Inputs Adjustable Constants Outputs
AVR Ramp Auto Increase (RF1@IN)
Auto Decrease (RF1@DC)
Manual Active (RF1@VE)
Go to Preset (RF1@3E)
Track Enable(RF1@T2)
Track Value(RF1@2E)
High limit (RF1THO)
Low limit (FR1TLO)
Ramp rate (RF1NRT)
Preset value (RF1@T3)
Track lag (RF1WLG)
Reference out
AVR Setpoint Frequency (ASP@FQ)
React. Cur.(ASP@IQ)
REF Out (ASP@RO)
UEL Out (ASP@UE)
PSS Out (ASP@PV)
Auto/Man (ASP@AC)
Extra Input (ASP@EX)
PT Fail (ASP@PT)
Gen Volts (ASP@VM)
PSS Armed (ASP@PC)
Gen Watts (ASP@WT)
PT Fail Reset (ASP@PR)
ASP Limit High (ASPHLM)
V/Hz Gain (ASPVHZ)
RCC Gain (ASPRCC)
PSS High Watt (ASPHIW)
PSS Low Watts (ASPLOW)
AVR Ref
Auto Active
Man Active
PSS Active
V/Hz Active
UEL Active
Setpoint In Limit
Latched PT Fail
FCR FCR Setpoint FCR@SP
FCR Enable FCR@EN
FCR Alternate Setpoint
FCA@SP
FCR Alternate Enable
EFA@EN
FCR Prop Gain (RGKC0)
FCR Integral Gain (IRWIC0)
Alt FCR Prop Gain (IRGKA0)
Alt FCR Integral Gain
(IRWIA0)
FCR Output
ILOP0
AVR Generator Volts (AVR@FB)
FVR Output (AVR@TV)
AVR Ref (AVR@SP)
Manual Active (AVR@TC)
Bridge Fire Enabled
(AVR@ZC)
High Limit (AVRPLM)
Low Limit (AVRNLM)
Prop. Gain (AVRPGN)
Integral Gain (AVRIGN)
Tracking Gain (AVRTGN)
AVR Out
AVR In Limit
AVR Error
FVR Ramp Manual Increase (SS)
Manual Decrease (SS)
Auto Active (RF2@2E)
Go To Preset (RF2@3E)
High limit (RF2TH0)
Low limit (RF2THL)
Ramp rate (RF2NRT)
Preset value (RF2@T3)
Reference Out
FVR Field Current (IFE)
AVR Out (EFR@TV)
FVR Ref (EFR@SP)
Auto Active (EFR@EN)
Bridge Fire Enabled
(MPWRENAB)
FVR Turn Off (FLDZVL)
Tracking Gain (FLDTGO)
Proportional Gain
(FLDPGO)
Integral Gain (FLDIGO)
FVR Out
EX2000 PWM Digital Exciter GEH-6375
29
Table 3-1. Standard Software Functions - Continued
Function Inputs Adjustable Constants Outputs
UEL Watts (RA1@I1)
Gen. Volts(@INPUT)
VARs (R2@FBO)
VARs Ref. 0 (FGENYO)
Watts Ref. 1 (FGENX1)
VARs Ref. 1 (FGENY1)
Watts Ref. 2 (FGENX2)
VARs Ref. 2 (FGENY2)
Watts Ref. 3 (FGENX3)
VARs Ref. 3 (FGENY3)
Watts Ref. 4 (FGENX4)
VARs Ref. 4 (FGENY4)
Prop. Gain KP (R2KFBO)
Integral Gain KI (R2WI_0)
High Limit (R2LMPO)
Low Limit (R2LMNO)
UEL Output
OEL Field Current
(CURRENT)
High Limit (CRLMHI)
Low Limit (I
2
tAFL)
FCR Preset (PIT@RS)
Inst. Overcur. Lim (PITPU)
IIT Limit (PITLM)
FCR Pos. Limit (FCRPLM)
IIT Cooling Mult. (I
2
tCMT)
OEL Act
(FLDMOD)
IIT Acc
(PITIACCM)
Firing Block FVR Out
FCR Out
IOC Active
Start/Stop
Retard Limit Firing Code
GEH-6375 EX2000 PWM Digital Exciter
30
Figure 3-1. Software Overview
EX2000 PWM Digital Exciter GEH-6375
31
Figure 3-2. Automatic Voltage Regulator (AVR) Ramp
Figure 3-3. Automatic Voltage Regulator (AVR) Setpoint
GEH-6375 EX2000 PWM Digital Exciter
32
Figure 3-4. Automatic Voltage Regulator (AVR)
Figure 3-5. Field Voltage Reg (FVR) Ramp
EX2000 PWM Digital Exciter GEH-6375
33
Figure 3-6. Field Regulator (FVR)
Figure 3-7. Under-Excitation Limit (UEL)
GEH-6375 EX2000 PWM Digital Exciter
34
Figure 3-8. Over Excitation Limit (OEL)
EX2000 PWM Digital Exciter GEH-6375
35
Figure 3-9. Firing Block
GEH-6375 EX2000 PWM Digital Exciter
36
Notes:
EX2000 PWM Digital Exciter GEH-6375
37
CHAPTER 4
SOFTWARE CONFIGURATION AND SCALING
4-1. INTRODUCTION
The software to configure various regulators,
metering, and protective functions within the
EX2000 PWM regulator operates on a count system
representing actual feedback values. These
feedbacks are generated by current transformers,
voltage transformers, and dc shunts. The signals
may pass through isolators and amplifiers. These
analog signals are transformed to digital signals by
means of voltage controlled oscillators.
The regulator controls use standard normalized
values to represent the variable being monitored or
regulated. This enables the use of software that, to a
large extent, is not application dependent. For
example, the automatic voltage regulator (AVR)
controls the generator terminal voltage based on a
setpoint chosen by the operator. For any machine, 1
per unit (or rated terminal voltage) is defined within
the AVR to be 20000 counts. If the operator
chooses to set the terminal voltage at rated then the
reference to the AVR is 20000 counts. The voltage
feedback counts are compared to this reference to
generate an error signal and the appropriate control
action takes place to maintain the feedback counts at
20000.
The actual generator terminal voltage being
regulated is not referenced at this control level. It is
therefore necessary to ensure that the feedback
counts seen by the regulators are adjusted to provide
the standard number of counts when the generator is
operating at rated. This is referred to as scaling.
An EX2000 system can be constructed several ways
to accommodate customer system requirements. For
example, the regulator can be fed from the
permanent magnet generator or from an auxiliary
bus. It can be a brushless regulator or an SCT
control winding regulator. The controls are set to
match the hardware used. This is known as
configuration.
4-2. CONFIGURATION AND SCALING
EXAMPLE
The following section shows how scaling is
performed using example generator data. The
example system is configured as a Brushless exciter
regulator fed from a PMG with a 125 V dc battery
backup. There is also a single set of generator
potential transformers (PT)s and no line PTs. The
scaling may not apply to all EX2000 applications.
Contact GE Motors and Industrial Systems before
changing any EE Values.
Even though the EX2000 PWM is a brushless
regulator and as such, operating data from the
generator field is not readily available to the
regulator, the generator information listed is critical
to the overall operation and performance of the
regulator and excitation system. Assumptions made
in the AVR and exciter field regulators are based
upon the available generator data.
4-2.1. Example Generator, Exciter And
Regulator
The example generator, exciter, and regulator data
in this chapter is as follows:
4-2.1.1. GENERATOR DATA:
KVA 100000
Frequency 60 Hz
Volts 13800
PF 0.85
Cold Gas Temperature 40 C
Rated Stator Amps 4184
Amps Field No Load 313
Amps Field Air Gap 281
Amps Field Full Load 846
Amps Field Ceiling 1360
Field Open Circuit Time
Constant (Tdo) 5.615 sec
Field Open Circuit Subtransient (Tdo) 0.022 sec
GEH-6375 EX2000 PWM Digital Exciter
38
Field Winding Resistance 0.199 ohms at 25 C
Volts Field Full Load 136
Station battery volts 125 V dc
PT Ratio 14400/120
Current Transformer (CT) Ratio 8000/5
4-2.1.2. EXCITER DATA:
kW 268
Volts 300
Rated Exciter Output Amps 893
Amps Field Air Gap (exciter) 1.712
Amps Field No Load (exciter) 3.52
Amps Field Synch Imp.(exciter) 6.236
Amps Field Full Load (exciter) 9.54
Amps Field Ceiling (exciter) 15.45
Exciter Time Constant (Tdo) 0.35 sec
Field Winding Resistance (exciter) 4.871 ohms
at 25 C
4-2.1.3. REGULATOR DATA:
DC shunt 10 A = 100 mv
Dynamic Discharge Resistor 17.0 ohms
Dynamic Discharge Resistor
Rated Amps 6.0 A
Charge Control Resistor 2.0 ohms
Voltage Doubling No
DC Link Expected Volts
from PMG 137
Maximum Expected DC
Link Volts 360
4-3. GENERAL CONFIGURATION
Throughout this example, the software nomenclature
is defined as follows:
EE.XXXX (ABCDEF), where "XXXX" represents
the software address location and "ABCDEF"
represents the software address name.
There are many parameters that are set in the
EX2000 PWM which are not discussed in this
manual. Many of them are used to set up
configurable parameters such as the Status S data
link, communication, and so on. These are fixed
parameters baud rates, displays configuration,
keypad configuration for all EX2000 PWM
applications and should not be changed or need
changing on any requisition. If any parameters not
discussed in this manual are in question, contact the
product service group of GE Motors and Industrial
Systems or the local GE service organization for
advice.
The following are general configuration adjustable
parameters (EEPROM) used to direct signals and
help make the configurable blockware function as a
brushless regulator.
Generator Model Jumper EE.3850 (GMJMPR)
EE.3850.1 Used to simulate PT failure in
simulator mode. Normally set to
zero.
EE.3850.2 Selects slip source for Power
System Stabilizer (PSS) The
example has no PSS
EE.3850.3 Selects extra PT source for
calculation of PT failure. Can only
be from PTCT board for EX2000
PWM. Set to (0).
EE.3850.4 Generator model type. Can be static
(0) or rotating (1). Brushless
regulator is rotating.
EE.3850.5 Selects 50 hz (1) or 60 hz (0) system
for simulator and normal operation.
Example is 60 hz.
EE.3850.6 Selects terminal (0) or separately
fed (1)inputs for bridge. EX2000
PWM is separately fed.
EE.3850.7 Selects whether the extra PT is used
for calculations if a PT failure is
detected. (1) is yes, (0) is no. No
PT failure detection available in the
example.
EE.3850.8 Selects location of extra PT input.
Line side (1) of 52G breaker or
generator side (0). Example does
not have extra PT input.
EE.3850.9 Select if PT failure detection is
always (0) or only with 52G closed
(1). No PT fail detection in
example system. Set to zero.
EE.3850.10 Use maximum of PT feedbacks for
calculations. (1) is yes, (0) is no.
No for example.
EX2000 PWM Digital Exciter GEH-6375
39
EE.3850.11 Adjusts simulator for 60 hz (0) or
50 hz (1)
EE.3850.12 Sets LOE calculation for high gain
(rev. G1B) PTCT board for LOE
calculations. All new EX2000
PWM use high gain PTCT inputs.
Set to (1)
EE.3850.13 Adjusts PTCT board inputs for Rev.
A (0) or Rev. B (1) board.
Configuration Jumper EE.589 (ECNFIG)
EE.589.0 Selects IFG feedback to be from
SHPL on GDDD (1), IA2PL from
GDDD (2) or none (0). Set to 2 for
EX2000 PWM
EE.589.2 Selects IFE feedback to be from
SHPL on GDDD (1), IA2PL from
GDDD (2) or none (0). Set to 1 for
EX2000 PWM
EE.589.4 Selects VFG to be from APL/BPL
on GDDD board (1), IA1PL on
GDDD board (2) or none (0). Set to
zero for EX2000 PWM.
EE.589.6 Selects VFE to be from APL/BPL
on GDDD board (1), IA1PL on
GDDD board (2) or none (0). Set to
one for EX2000 PWM.
EE.589.8 Selects field regulator feedback to
be either VFG (0), VFE (1), IFG (2)
or IFE (3). EX2000 is a current
regulator for the exciter field. Set to
three.
EE.589.10 Selects source for Var.105 to be
either IFG (0) or IFE (1). Set to 1
for EX2000 PWM.
Other general configuration parameters
important to the operation of an EX2000 PWM
regulator
EE.550 Identifies product type. For
EX2000 hardware select 4.
EE.556 Identifies hardware feedback board.
For EX2000 PWM select GDDD
board 2.
4-4. FEEDBACK SCALING
As a brushless regulator, there are a limited number
of feed back signals from the generator available to
the EX2000 PWM. These are potential transformers
and current transformers monitoring the stator
output, a shunt feed back from the exciter field, and
exciter field voltage. Main generator field current
and voltage are not commonly available for display
or control on a brushless generator. The following
sections will detail the common feed back signals
and the scaling used in the EX2000 PWM.
4-4.1. Generator Feedback
The PT and CT signals to the EX2000 PWM
regulator are isolated by the PTCT board. The
voltage signals generated by the PTCT are sent to
the TCCB transducer board. Here voltage
controlled oscillators (VCO) translate the analog
signals into digital counts.
The PTCT board will accept one set of three phase
CT inputs from the main generator stator current
transformers. These CTs must have a nominal 5
amp secondary and phase A and C are required for
correct operation of the EX2000 PWM regulators.
Phase B CT input is not required and is not used by
the controls. EE.3840 CT_ADJ is used to account
for off nominal CTs. The scaling for this EE setting
is calculated as equal to 20480/(actual 1 pu CT
secondary amps)
For the example generator data: EE.3840 =
20480/(4184*5/8000) = 7832
The PTCT board also accepts up to three sets of
generator voltage transformer inputs. These inputs
are three phase inputs with a nominal secondary
voltage of 120 V ac. Two of the inputs are for
generator voltage before the synchronizing breaker.
These two PT inputs should both be on the same
side of the generator step up transformer. The third
input can be used for a line side of the
synchronizing breaker voltage input. The scaling
for this EE setting is calculated as equal to
491520/(actual 1 pu PT secondary volts)
GEH-6375 EX2000 PWM Digital Exciter
40
For the example generator data: EE.3841 =
491520/(13800*120/14400) = 4274
4-4.1.1. POTENTIAL TRANSFORMER
FAILURE DETECTOR (PFTD) OPERATION.
In the example system only one set of PT inputs are
specified. The second set of generator side PTs can
be used for an optional Potential Transformer
Failure Detection (PTFD) function. The generator
PTFD operates by comparing the sum of the
absolute counts for V12 and V23 signals (generator
PT signals) with the sum of the absolute counts
representing the extra PT input signals VX12 and
VX23.
The 1 pu secondary voltages from these two sources
depends on the transformer ratios used. A scale
factor PTFDSC EE.3835 is used to null the signal
difference that could exist. The resulting magnitude
difference is filtered and the absolute value is
compared to the failure detection level set by
EE.3837 PTFDVL. Under normal conditions the
difference between the two sums should be
approximately zero. If this absolute difference is
greater than the value set by PTFDVL EE.3837 then
a PT FAIL FLT.488 is generated and VAR.1166
EXPTFD becomes true. This variable is sent to the
excitation autosetpoint block input ASP@PT and, if
true, forces a latched transfer to the manual
regulator.
The PTFD can be disabled off-line by setting
EE.3850.9 GMJMPR.9 equal to 1. The PTFD
detector can be tested using the simulator by setting
GMJMPR.1 equal to 1 to simulate loss of V12 PT
signal.
Setting EE.3850.9 GMJMPR.7 equal to 1, the extra
set of PTs can be used for all calculations
downstream from the PT failure detector software.
4-4.1.2. PTFD SCALING. Parameter PTFDSC
EE.3835, PT failure scale adjust, is used to null any
signal difference existing between V and X PTs. If
a second PT for failure detection were supplied,
then set EE.3835 = 4096 * (1 pu V PT secondary
volts/1 pu X PT secondary volts).
In most cases, the second set of PT inputs would be
the same secondary as the first and the default value
of 4096 would be used
4-4.1.3. PTFD DETECTION LEVEL. The failure
detection level is set using PTFDVL EE.3837. It is
typically set to approximately 50% of nominal (120
V) PT signal (loss of half the voltage of one phase).
For the example system, EE.3837 = 0.5 * 2048 *
(115/120) = 981. In the formula, 2048 represents a
complete loss of a PT signal and 115 is the actual 1
pu PT secondary volts.
A PT failure detection causes automatic transfer to
the field (or manual) regulator. This regulator
controls field current level and does not look at
generator terminal voltage. This is the only fault
that initiates automatic transfer to the manual
regulator. It is not possible to transfer back to the
AVR until this latching fault is cleared. The
operator interface should indicate when a PTFD has
occurred. A reset signal must be sent to reset the
PTFD. A soft reset of the core is necessary to clear
the fault display from the LDCC board once the PT
feedback problem is fixed.
4-4.1.4. P.T.U.V. If a second set of generator
PTs is not provided then the PTFD scheme
described above can not be used. In this case the
PTFD function is disabled by setting EE.3837 to
65,535 and protection is provided by pointing
ASP@PT at VAR.1182 EXPTUV. In the event of
loss of one phase or complete loss of generator
voltage signal as measured by the TCCB board, and
after a time delay specified in EE.3834 PTFDT1.
EXPTUV will become true, forcing the control into
manual regulator mode.
4-4.2. Bridge Voltage Feedback
The bridge (regulator) dc output voltage feedback
signal is fed via APL-5 and BPL-6 from the IAXS
board to the GDDD board. A voltage controlled
oscillator on the GDDD board converts this analog
EX2000 PWM Digital Exciter GEH-6375
41
signal to a frequency and digital counts. JP1 on the
GDDD board is set per the maximum expected dc
link voltage. For units not employing the voltage
doubling feature of the EX2000 PWM regulator,
this is normally 360 volts. The example system
does not use voltage doubling.
The dc link voltage feedback signal is fed to the
GDDD board via the DCPL -1 and 2 connections on
the IAXS board. Again, JP2 on the GDDD board is
set to the maximum expected DC link voltage.
EE.612 VDCMAX sets the 1 pu count level (20000)
equal to 360 or 604 volts for scaling of both the DC
link voltage and DC output voltage. JP3 on the
GDDD board sets the operation level of the dynamic
discharge firing circuit. The selection of JP3 is also
based upon the maximum expected dc link voltage.
JP1, 2 and 3 on the GDDD board should all be set to
the same settings.
4-4.3. Bridge Current Feedback
The EX2000 PWM regulator field current feedback
signal is from shunt SHA and is fed to the GDDD
board via connections SHPL-1 and -2. This input is
scaled using EE.1505 CFISF0. This trims the gain
of the VCO to achieve 5000 counts at 1 pu bridge
current. The scaling for this EE setting is calculated
as EE.1505 = 32768*(shunt rating)/(regulator amps
field full load). For the sample system, the shunt
rating = 10 A for 100 mv. The exciter AFFL rating
is 9.54 A.
Set EE.1505 = 32768 *(10)/(9.54) = 34348
4-4.4. Feedback Offsets
Due to the tolerance limits of the op-amps and
VCOs that provide the EX2000 PWM feedbacks, it
is possible that positive or negative offsets may
occur with zero signal feedback. The actual offsets
produced are dependent on the actual hardware and
must therefore be zeroed at startup. The bridge
output voltage, dc link voltage and shunt feedback
are adjustable using the following feedback offsets.
EE.1508 VF1OF0 is used to zero the VFB1 bridge
voltage feedback offset. With no bridge output,
variable 1014 should be read using diagnostic test
31. This count value multiplied by the constant -
1141 and divided by the scale factor value in EE.612
VDCMAX then becomes the value in EE.1508.
For example, with power on the bridge but the
bridge not firing, monitor VAR.1014 (assuming
VFE is the selected feedback) for any zero offset.
Assume the offset found was approximately 80
counts. Set EE.1508 = (80*-1141)/360 = -253.
Enter this value and continue to monitor VAR.1014
to verify that the offset is now zero.
EE.1510 CF1OF0 is used to zero the CFB1 bridge
current feedback offset. With no bridge output,
variable 1016 should be read using diagnostic test
31. This count value multiplied by the constant
21475 and divided by the scale factor value in
EE.1505 CFS1F0 then becomes the value in
EE.1510.
For example, with power on the bridge but the
bridge not firing, monitor VAR.1016 (assuming IFE
is the selected feedback) for any zero offset.
Assume the offset found was approximately -100
counts. Set EE.1510 = (-100*21475)/34348 = -62
Enter this value and continue to monitor VAR.1014
to verify that the offset is now zero.
EE.1513 VDCOF0 is used to zero the dc link
voltage feedback offset. Since dc link voltage is
required for control power, this offset must be made
with dc link voltage present. VAR.1018 should be
read using diagnostic test 31. The dc link voltage
should be read on the IAXS board connection points
PL and NL. This measured voltage will then be
converted to counts. The converted measured
counts minus the count value in VAR.1018 then
becomes the value in EE.1513.
GEH-6375 EX2000 PWM Digital Exciter
42
For example, with power on the bridge but the
bridge not firing, monitor VAR.1018. Assume it is
7825 counts. Then assume the measured value of
the dc link is 137 volts. Converting the measured
voltage to counts gives 137/360 * 20000 equals
7611. Set EE.1513 = (7611-7825) = -213 counts.
Enter this value and continue to monitor VAR.1018
to verify that the offset is now zero.
4-4.5. Instantaneous Overcurrent Trip
An instantaneous overcurrent trip occurs if the
bridge current, as monitored by SHPL (CFB1),
exceeds the threshold set by EE.1518 IOCTRO
where 5000 counts = 1 pu Set EE.1518 = 25000 (5
pu) with EE.1517 IOCTDO = 0 for no time delay.
4-5. REGULATOR SCALING
There are several regulators and limiters available in
the EX2000 PWM. The applicable one-line or
system ordering documents will detail whether or
not all or any of these are supplied on a given
requisition. Generally the AVR, FVR, and OEL
regulators are supplied as standard. The UEL, RCC,
and V/hz limiters are also generally standard
features. PSS and VAR/PF controllers are typically
supplied as options.
4-5.1. Automatic Voltage Regulating System
The primary purpose of the automatic voltage
regulator (AVR) is to control the generator terminal
voltage according to a chosen reference. The
terminal voltage can then be modified by various
limiter and regulator functions.
4-5.1.1. AVR OPERATION. The EX2000 PWM
is designed to be started in AVR. The exciter can be
started in AVR mode with the generator operating
from 20 to 100 Hz. To prevent initial overshoot, the
integrator is held at the preset value until 95%
voltage is obtained. For a normal bandwidth AVR,
this also means forcing the regulator to its maximum
output until 95% of terminal voltage is reached. If
the speed of the generator is below rated when the
regulator is started, the V/Hz limiter will hold down
the terminal voltage and regulator output such that
the volts per hertz ratio specified in the AVR
controls is maintained.
4-5.1.2. REF1 OPERATION. The selected
(unmodified) reference originates in the INC/DEC
reference block REF1 (see Figure 3-2). The initial
reference used in the EX2000 PWM is a preset
value normally set for 1 pu generator voltage. The
REF1 output tracks this value when a start is given
to the regulator. During this initial operation the
RAISE and LOWER controls are ignored.
Once the startup operation is complete, the reference
can be changed by selecting RAISE or LOWER
from the operator station with the regulator in
AUTO regulator. When off-line, selecting RAISE
or LOWER controls the generator terminal voltage
over a range set in REF1 (and the autosetpoint
block). This range is normally 10% of rated
terminal voltage. When on-line, selecting RAISE or
LOWER increases or decreases the generator
terminal reactive voltage and/or the power output of
the generator. The more stiff the connection to the
power system (lower impedance tie) the less the
generator terminal voltage is able to change.
An optional volt ampere reactive/power factor
(VAR/PF) controller can also control the output of
the REF1 block. While under control of the
VAR/PF controller, the slew rate of REF1 is slowed
to an alternate ramp rate, and the operator
RAISE/LOWER inputs are ignored.
When the exciter is operating in manual, the
autosetpoint reference REF1 tracks a value
representing the sum of ASP@VM (normally
generator voltage) and the reactive current
compensation signal. While REF1 is tracking this
value, the INC/DEC commands from the operator
station are ignored in the REF1 block. The output
of REF1 in VAR.282 REF1OUT0 is passed to the
autosetpoint block (EXASP).
4-5.1.3. REF1 SCALING AND
CONFIGURATION. REF1 tracks target RF1@T3
EE.3402 without delay during startup. It is normally
pointed to a value of 20000 counts for 1 pu
generator voltage. For 1 pu generator voltage set
EE.3402 = 19.
EX2000 PWM Digital Exciter GEH-6375
43
During startup, a quick store register can be used to
preset the terminal voltage to a value other than
rated. This register can contain a count value
representing the desired preset voltage. RF1@T3
should then be pointed to this address. For example,
during startup, if the desired preset voltage is 12.5
kV on a 13.8 kv machine, the reference preset
counts required is 12.5/13.8 * 20000 = 18116
counts.
Quickstore EE.95, currently an unused register, can
be used to store this value. Then, point EE.3402
(RF1@T3) to EE.95 instead of the normal EE.19
location.
The range of the AVR is set using EE.3414 RF1TH0
(upper limit) and EE.3412 RF1TL0 (lower limit).
Set this to provide a range of 10% of rated
generator voltage. Set EE.3414 = 18000 and
EE.3412 = 22000.
To select the ramp rate of the AVR set
EE.3400.6 = 0 for a normal INC/DEC scale control
setting of 1/10 bits/sec. The time to ramp across the
AVR range is set by the normal INC/DEC rate
EE.3421 RF1NRT.
The range of the AVR = (22000-18000) = 4000.
The desired time to cover this range is 60 seconds
taking into account the setting of EE.3400.6. Set
EE.3421 = (4000/60) *10 = 667.
4-5.1.4. AUTOSETPOINT BLOCK. The
selected reference from REF1 enters the
autosetpoint block (EXASP) as the main auto
reference setpoint. This reference can now be
modified in the autosetpoint block by various
standard and optional regulators and limiters. In
addition to the REF1 input the ASP block receives
feedback variables for reactive current, generator
terminal voltage, generator frequency, the output of
the under excitation limiter, and generator real
power if a power system stabilizer (PSS) is used
(see Figure 3-3).
Automatic regulation is enabled through the
operator station or the A/M selector button on the
LDCC board programmer keypad. When auto is
active, VAR.953 ASPAUTOA will be true. The
ASP block also has an input from the PTFD (or
PTUV). When a PT failure is detected, regulation is
switched to the MVR. ASPAUTOA becomes false
and remains latched in that state until the PT
feedback problem is corrected, the core is soft reset,
and the PTFD reset button on the operator station is
pushed to permit selection of AUTO operation.
Configuration jumper EE.589 selections can
disabled the PTFD while off-line.
The ASP block contains a summing junction,
minimum value gate, and a positive output limiter.
The summing junction adds the output of REF1, the
UEL regulator output, the PSS regulator output (if
present), and an extra input ASP@EX. This extra
input can be used to insert a test signal. The RCC
compensation signal is subtracted in the summing
junction.
The output of the summing junction feeds a
minimum value gate where it is compared with a
V/Hz limit signal proportional to the generator
frequency by an amount set in EE.3789 ASPVHZ.
The minimum of these two references is used as the
reference sent to the regulator. The maximum
output is limited to a value set in EE.3790
ASPHLM. If the reference used by the regulator is
the V/Hz limit and the exciter is in auto, then
VAR.958 ASPVHZA is set true and an indication is
given that the exciter is in V/Hz limit.
If a positive value is input to the summing junction
from the UEL and the exciter is in auto, then
VAR.959 ASPUELA is set true and an indication is
given that the exciter is in UEL. The output of the
AVR setpoint block VAR.158 ASPAVRSP is sent
to the AVR block as the regulator reference signal.
4-5.1.5. AUTOSETPOINT BLOCK SCALING
AND CONFIGURATION. For the example system
the V/Hz limiter will be set to 110%. Set EE.3789,
the V/Hz gain, to 282 (256 = unity) For 50 Hz
applications, multiply EE.3789 by 6/5.
The ASP High Limit is set in EE.3790 ASPHLM.
This is generally set for 110% of rated or 22000
counts. For 50 Hz applications, multiply EE.3790
by 6/5.
GEH-6375 EX2000 PWM Digital Exciter
42
4-5.1.6. AUTOMATIC VOLTAGE
REGULATOR (AVR) BLOCK. The AVR is a
proportional plus integral regulator that compares
the generator terminal voltage feedback (derived
from the V12 and V23 generator PT signals) with a
reference from the auto setpoint block to produce
an error signal. This error signal, VAR.156
AVRERROR, is fed to the PI regulator. If the
EX2000 PWM is in automatic regulator, the output
of the AVR, AVROP VAR.157 is then fed to the
inner loop field regulator. The AVR output is
limited to approximately 2 pu field current so as to
not overdrive the exciter. The output of the AVR is
passed through the field regulator to cancel the
impact of the additional time constant of the rotating
exciter. By doing this, the calculations and settings
of the various regulator limiters, (UEL, V/Hz, OEL)
can be set using the same rules as a terminal fed or
bus fed excitation system. Tuning of regulators in
the field is thus minimized.
The AVR is preconditioned to a value
corresponding to AFNL at startup. The initial value
of AFNL used could be an estimated value. After
the initial startup, when a precise value of firing
command counts for AFNL is known, the
preconditioning value stored in EE.92 can be
adjusted accordingly.
When the precondition input AVR@ZC is true, the
AVR output follows the preconditioning value
AVR@ZV. If AVRJMP.0 = 1 the integrator
continues to follow AVR@ZC until AVRERROR is
less than 5% (1000 counts on a 20000 base). If, in
addition to AVRJMP.0 = 1, AVRJMP.1 also = 1
then the output of the AVR is forced to maximum as
set in EE.3772 AVRPLM until the AVRERROR is
less than 1000 counts. If the exciter is in MANUAL
(ASPMANUA true), the AVR tracks the output of
the field regulator FLOPO VAR.1004.
The AVR integrator has anti-windup protection that
zeros the error feeding the integral gain if either:
a. The output is in positive limit or if the
EX2000 PWM regulator is in FCR and the
error signal feeding the regulator is positive.
b. The AVR output is in negative limit or in
full retard and the error signal feeding the
regulator is negative.
4-5.1.7. AVR SCALING AND
CONFIGURATION. The AVR response is not set
for optimum speed, but for acceptable performance
without risking instability due to local mode
oscillations. This setting is considered to be a
normal bandwidth regulator. A high bandwidth
regulator is used when a high gain fast response
AVR is required. The example assumes a normal
bandwidth regulator. If a high bandwidth regulator
is chosen, then the high bandwidth settings for the
UEL regulator should be used also.
AVRJMP EE.3759.0 is set to 1 for AVR output to
follow AVR@ZC until regulator error is less than
1000 counts. Set at 1 for a high bandwidth exciter
also.
EE.3759.1 is set to 1 on a normal bandwidth exciter
to hold AVROP in ceiling until AVRERROR is less
than 1000 counts. Set to zero for a high bandwidth
exciter.
AVRPLM EE.3772 is the positive limit for AVR
output. Normally set to 10000, which is
approximately 2 pu current for the exciter field.
AVRNLM EE.3773 is the negative limit for AVR
output. Set to 0
AVRTGN EE.3770 is the AVR tracking gain. This
sets the time delay for the AVR to track the output
of the field regulator while in manual regulator. Set
EE.3770 = 5 (where 100 = 1 rad/sec) for a 20
second tracking filter.
The following is an example of setting the AVR
regulator for an EX2000 PWM regulator with
normal bandwidth.
Prior to startup, the AVR output is preset to the no
load exciter field current level. This effectively
wipes out overshoot problems when starting in the
automatic regulator.
EX2000 PWM Digital Exciter GEH-6375
43
AVR@ZV EE.3764 points to EE.92 In EE.92, the
RUN2RF storage register stores the firing command
count value necessary to produce 80% exciter
AFNL. In the example, exciter AFNL was 3.52 A
dc.
Set RUN2RF EE.92 to a FIRCMD = 0.8 * AFNL*
5000/AFFL = 0.8*3.52*5000/9.54 = 1476
4-5.1.8. AVR PROPORTIONAL GAIN. The
proportional gain of the PI regulator is set as
follows:
1. Determine the transient gain requirements of
the system.
2. Calculate the proportional gain which is
directly proportional to the transient gain. For the
normal bandwidth regulator, set the transient gain to
4*Tdo (the open circuit field time constant) with 20
as a default minimum for new gas and steam
applications. A high bandwidth regulator should be
set for a transient gain of 100.
From the transfer function of a brushless EX2000
PWM regulator, the relationship between
proportional and transient gains is:
Transient gain = (Kp*20000 * K
ex
*AFFL
ex
) /
(VFAG
gen
*5000) where K
ex
is the gain of the
exciter. The gain of the exciter is calculated as the
(voltage out/current in) or ((VFFL
gen
at 100 C -
VFNL
gen
at 100 C) / (AFFL
ex
- AFNL
ex
)). For the
example system, K
ex
is calculated to be (216-
80.13)/(9.54-3.52) = 22.51.
VFAG
gen
is the air gap voltage which is determined
by reading IFAG from the machine estimated air gap
line at 1 pu armature voltage. The example
generator has IFAG of 281 A dc. The rated field
resistance Rf@rated temp is defined as 100 C. The
Rf@100C was not given and is therefore
extrapolated from Rf@125C to give Rf@100C =
.256 ohms. VFAG = .256 * 281 = 72 V dc.
Solving for Kp gives Kp = (transient gain *
VFAG
gen
*5000) / (20000 * K
ex
*AFFL
ex
) =
(20*72*5000) / (20000*22.51*9.54) = 1.67.
Set AVRPGN EE.3769 = 1.67 * 256 (where 256 =
unity) = 429
4-5.1.9. INTEGRAL GAIN. Set Kp/Ki = 1 for a
lead time constant of 1 sec. For the example Ki =
Kp = 1.67
Set AVRIGN EE.3771 = 1.67 * 100 (where 100 = 1
rad/sec) = 167
4-5.2. Under Excitation Limiter (UEL)
The two basic problems with operating a generator
in the underexcited region of the capability curve
are stator end iron heating and generator steady state
stability limit. Stray flux in the end turn region of a
high speed steam or gas turbine driven generator can
cause large losses in the core end iron during
underexcited operation.
The steady state power stability limit indicates the
maximum real power that can be delivered at
constant field voltage. The effect of the high initial
response AVR is to substantially increase the steady
state stability limit. The generator must be
constrained to operate in the underexcited region in
an area where the unit would be stable if a transfer
were made to the field regulator.
The thermal limit is usually more restrictive than the
power stability limit. The default scaling of the
UEL curve described is based on the generator
capability curve. The intent is to protect the
generator from end iron heating effects by setting
the UEL approximately 10% above the underexcited
reactive capability curve. The 10% is chosen to give
sufficient safety margin.
The stability limit is a function of the network to
which the generator is connected. The customer is
responsible for system stability protection settings.
If the customer supplies UEL curve points, enter
those values instead of the values from the method
described.
4-5.2.1. UEL OPERATION. This section
describes the UEL operation which is performed by
a combination of standard blocks (see Figure 3-7).
The capability of a generator when plotted on a
reactive power versus real power plot changes as
terminal voltage changes. This means that a number
of curves are required to provide protection over the
normal 10% terminal voltage range permitted by the
AVR. If the real and reactive power signals are
GEH-6375 EX2000 PWM Digital Exciter
42
normalized by dividing by the square of the terminal
voltage then the capability of the generator becomes
a single curve.
The generator watts signal is first normalized by
dividing by the square of the filtered voltage signal.
The resulting normalized power is then filtered and
absoluted. This value is fed to the function
generator block where the normalized pu UEL curve
has been entered. The output of the function
generator block is the UEL curve point
corresponding to that value of generator real power
output. This value then becomes the UEL limit
allowed.
This UEL limit as read from the curve is normalized
VARs and must be multiplied by the square of the
filtered voltage signal to produce a VAR reference
for the proportional plus integral regulator. The PI
regulator is enabled by an AND gate if 52G is
closed and the AVR is in control. It compares
measured generator VARs feedback quantity with a
reference limit derived from the UEL curve to
generate an error signal which feeds the regulator.
The output of the PI regulator block is fed to a
limiter set to allow only positive outputs. This value
is then fed to the excitation autosetpoint block
ASP@UE input. It is added to the existing AVR
setpoint to produce an increase in the excitation
level sufficient to prevent the excitation decreasing
below the level corresponding to the UEL limit
curve chosen.
4-5.2.2. UEL SCALING AND
CONFIGURATION. Configuring and scaling the
UEL function involves setting the PI regulator for
proper gain and time constants. It also includes
setting the UEL curve based on the generator
capability curve.
The UEL limiter uses process regulator #1. This is a
proportional plus integral regulator. A PI regulator
has the form:
Kp + Ki/s where Kp = proportional gain and Ki =
integral gain (rads/sec).
Only two sets of adjustments for the UEL regulator
are necessary. One for exciters using a normal
bandwidth AVR and one for those customers
requiring a higher bandwidth, such as a fast
response/high gain AVR. The default setting is
normal bandwidth. The recommended settings are
as follows:
Normal
EE.5899 = 200 (Ki = 2 rads/sec)
EE.5900 = 819 (Kp = 3.2)
High
EE.5899 = 200 (Ki = 2 rads/sec)
EE.5900 = 410 (Kp = 1.6)
NOTE
Two EEPROM values are set because
the command and feedback gains are
independently adjustable.
Steady state stability of the UEL can be verified by
operating the generator at various power levels then
slowly lowering the excitation to drive the generator
into the limit curve. Dynamic closed loop response
can then be verified by stepping the AVR setpoint
using the excitation autosetpoint block extra input
ASP@EX. A step of 1 or 2% is sufficient. If it is
not permissible to drive the generator into its true
limit curve then the curve could be reset at a safer
level and the testing performed using this curve.
4-5.2.3. UEL CURVE. The UEL limit curve is
obtained by using a general purpose background
function generator block. This is a five point
piecewise linear function generator. The function is
flat to the left of Y0, the first point, and to the right
of Y4, the last point. The X coordinates must be
monotonically increasing X0<X1<X2<X3<X4.
The coordinates are specified in counts, where
generator 1 pu watts = 5000 counts and generator 1
pu VARs = 5000 counts. The underexcited portion
of a typical generator reactive capability curve is
shown in Figure 4-1.
EX2000 PWM Digital Exciter GEH-6375
47
Generator Data: 100000 k VA
3600 RPM
0.85 PF
40 C cold gas
13800 V
1 pu power at unity power factor = 100 MW = 5000
counts. This value was defined during primary
scaling of the generator voltage and current
feedbacks. The EX2000 calculates watts and VARs
from measured generator voltages and currents.
If the customer has not specified UEL settings, the
following recommended settings can be used:
Recommended X coordinates are at 0.3, 0.6, 0.9,
and 1.2 pu MW. X = 0 is the X coordinate for Y0
point and needs to be entered. This gives the
following values:
X1 = 0.3 pu = 0.3*5000 counts = +1500 = EE.2864
(from the example curve this is equivalent to 30.0
MW)
X2 = 0.6 pu = 0.6*5000 counts = +3000 = EE.2866
(from the example curve this is equivalent to 60.0
MW)
X3 = 0.9 pu = 0.9*5000 counts = +4500 = EE.2868
(from the example curve this is equivalent to 90.0
MW)
X4 = 1.2 pu = 1.2*5000 counts = +6000 = EE.2870
(from the example curve this is equivalent to 120.0
MW)
Next, the Y coordinates must be chosen. This
method selects Y values 10% above the rated
capability curve to provide ample safety margin. If
more than one curve is given for different gas
temperatures, use the rated curve. In the example
given this is 40 C cold gas. From the chosen
customer reactive capability curve, read the VARs at
0 power. This is -35 MVARs. Add 10% of rated
kVA (not 10% of the reading) to define the Y0
point. Y0 = -35 + (10% * 100) = -25 MVARs. This
value must now be changed to counts to store in
EE.2872.
EE.2872 = (-25/100)*5000 counts = -1250 counts =
Y0
Y1, Y2 and Y3 are obtained as follows:
Y1 = -40 MVARs + 10 = -30 = -1500 counts =
EE.2865
Y2 = -35 MVARs + 10 = -25 = -1250 counts =
EE.2867
Y3 = -17 MVARs + 10 = -07 = -350 counts =
EE.2869
The final value Y4 is chosen differently. A straight
line is drawn from the Y3 point through the 1 pu at
unity power factor point to intersect the X = 1.2 pu
power line. This gives Y4 = -2*Y3 = -2 * -350 =
+700 counts = EE.2871. All this is based on the
assumption that the 0.9 pu power point on the
capability curve yields a negative value and the final
segment passes through rated k VA at unity power
factor. The final point Y4 is chosen this way
because this gives better coordination with loss of
excitation protection.
GEH-6375 EX2000 PWM Digital Exciter
48
Figure 4.1 UEL Curve
4-5.3. Reactive Current Compensator (RCC)
The RCC signal is used to compensate for
insufficient reactance between generators or when
there is too much reactance. The RCC simulates a
reactance on the generator output. If reactive
current increases, the amount subtracted from the
autosetpoint also increases. This lowers the
excitation voltage and therefore the amount of
VARs produced by the generator. It provides a
drooping characteristic to insure that the load
reactive power is equally divided between paralleled
machines.
Generally this compensation is required if machines
are paralleled directly on the same bus. If
generators are paralleled on the high side of their
generator step-up transformer, then sufficient
reactance should exist between the generators so
that additional compensation is not required. The
factory default setting is zero compensation.
Determine the amount of compensation necessary
during initial startup. The compensation is set to the
minimum required to ensure VAR sharing. Values
of 3% to 6% reactance are usually sufficient.
(Alternatively, EE.3791 ASPRCC can be set to a
negative value to provide line drop compensation
LDC).
RCC is set by EE.3791 ASPRCC, reactive current
gain. The range of this setting is 12.5%
compensation. The setting for the +12.5%
compensation is 32768 counts, or 2621.44 counts
per percent compensation. If an RCC of 4%
reactance is desired, set EE.3791 = 4*2621.44 =
10486. If LDC is required, EE.3791 is set to a
negative value. For a 4% line reactance, or line
drop compensation, set EE.3791 = -10486.
EX2000 PWM Digital Exciter GEH-6375
49
4-5.4. VAR/Power Factor Control
A VAR/Power Factor controller can be provided as
an optional regulator in the regulator core. Either
VAR control where a constant generator VAR
output is maintained or power factor control where a
constant generator power factor is maintained can be
selected. The two control actions are, of course,
mutually exclusive. The PF/VAR controller can be
configured to latch to the existing PF or generator
VAR output when the associated control action is
initiated.
The operator station is used to enable the PF/VAR
controller. The operator must adjust the generator
to the VAR output or PF that it is desired to
maintain. The appropriate operator station button is
then pushed to latch the output at the desired value.
To release the control action, the same button is
pushed a second time.
4-5.4.1. VAR//PF CONTROL OPERATION
AND CONFIGURATION. The PF/VAR control
block uses the generator VARs and Watts as its
feedback variables. These inputs are selected by
EE.3718 PF@VAR, normally pointed to VAR.1153,
generator VARs and EE.3719 PF@WAT, normally
pointed to VAR.1152, generator watts.
The watt and var signals pass through low pass
filters both of which are set by EE.3723 PFLPFW.
A setting of 5 rad/sec is typically used (where 100=1
r/s).
The filtered VAR signal is fed to a latch and the
negative input of the controller summing junction.
The latch gets set when VAR control is selected.
The input variable that controls VAR control
selection is set by EE.3717 PF@ENV. When this
variable is true, VAR control is selected. The latch
holds the value of VARs that was measured as the
latch was set. This latched variable is fed to a
switch. The switch is configured by EE.3720
PFARK. If PFARK is set to 0, then the switch will
pass the latched value of VARs to be regulated. If
PFARK is set at a non zero value then the generator
output VARs corresponding to this count value will
be maintained. This feature is typically not used.
The preset or latched VAR setting is fed to a second
switch that will pass either the VAR or PF reference
to a summing junction depending on which control
action has been selected. If the VAR setting was
chosen, the VAR reference will be fed to the
summing junction where the actual VAR feedback
will be subtracted to create an error signal. This
error signal passes through a deadband set by
EE.3722 PFDEBD (5000 counts = 1 pu). The
deadband setting should be chosen so that excessive
regulation does not occur while the required setting
is accurately maintained. From the dead band
function a raise or lower signal is given to the
exciter as required to maintain the value selected.
The raise signal is PFVRAISE VAR.718 and the
lower is PFVLOWER VAR.719.
The power factor controller functions in a similar
fashion.
The VAR signal is multiplied by 32768 and then
divided by the watt signal. The resultant is the
normalized tan of the angle between watts and vars
where 32768 equals a tangent of unity (45 degrees).
The resultant is filtered and then feeds a latch that
will be set if the PF control function is selected.
The output of the latch feeds a switch configured by
EE.3721 PFVWTK. If PFVWTK is set to zero the
latched value is passed. If PFVWTK is set to a non-
zero value, then the angle represented by the setting
of EE.3721 will be regulated. A non-zero value is
typically not used. The output of this switch is
multiplied with the actual generator watts and
divided by 32768. The resultant is the generator
VARs necessary to maintain the desired PF angle at
the new generator real power level. This becomes
the reference to the controllers summing junction,
where an error signal is developed which causes the
exciter to raise or lower the generator VAR output
to hold the desired power factor. The same
deadband setting applies to either the PF or VAR
controller.
NOTE
The algorithm does not calculate the
cosine of the angle between the
generator watts and vars so does not
explicitly develop a signal representing
the PF of the generator.
GEH-6375 EX2000 PWM Digital Exciter
50
4-5.5. Field Regulator (FVR)
The FVR (manual) regulates the exciter field
without reference to the generator terminal voltage.
It is possible to configure the field regulator to
regulate one of four variables. Either main
generator field quantities IFG and VFG or exciter
field quantities IFE and VFE are selectable. For the
EX2000 PWM, the field regulator is configured as a
current regulator with IFE as the feedback variable .
Normal regulator operation is in automatic voltage
regulator with transfer to the manual regulator only
occurring as a result of losing the generator terminal
voltage feedback signal(s) due to PT failure
detection. The PTFD detector is disabled off-line in
certain configurations. In this case, the field current
regulator (OEL) serves to limit the regulator output
to prevent overfluxing the generator. The operator
has the capability to switch the exciter to manual
regulation by an operator station command (see
Figure 3-5).
In automatic regulator, the field regulator receives
an input from the auto voltage regulator and acts as
an inner loop regulator in an attempt to cancel the
effects of the time constant of the rotating
equipment. This allows for greater speed of
response when operating in automatic regulator.
The AVR output is limited to 2 pu exciter field
current so as not to overdrive the regulator output.
4-5.5.1. REF2 OPERATION. The
increase/decrease reference block normally supplies
the field regulator reference to the core block
EXCOR. This reference block is identical in
structure to the REF1 block used by the AVR.
During exciter startup, the output of REF2 tracks,
without delay, the value pointed to RF2@T3. This
is EE.91 RUN1RF register. RUN1RF is set to the
count value representing 80 percent of AFNL
ex
.
Normal increase/decrease control is disabled at this
time. If the exciter is in AUTO regulator and is not
detected to be in limit then the output of REF2
tracks the variable pointed to by RF2@T2 which is
normally IFE.
The manual (backup) regulator tracks the field
current necessary to maintain the existing generator
terminal voltage. This tracking is delayed to avoid
following transient fluctuations or erroneous AVR
behavior. The ramp range is typically set for 70%
of AFNL
ex
to 120% AFFL
ex
in 120 secs. The output
of the REF2 block is passed through a software
switch to the EX2000 core block and then to the
MCP block as the field regulator adjust command
MFLDADJ VAR.165.
4-5.5.2. REF2 SCALING AND
CONFIGURATION. The present for the manual
voltage regulator RUN1REF EE.91 is set to a count
value for *0% of AFNL
ex
. Set EE.91 =
(0.8*AFNL
ex
*5000/AFFL
ex
) = 1476.
The REF2 ramp high limit is set to 120% of AFFL
ex.
Set RF2THO EE.3444 = 1.2*5000 = 6000.
The REF2 ramp low limit is set to 70% AFNL
ex
.
Set RF2LO EE.3442 = .07*(3.52/9.54)*5000 = 1291
Typically the ramp time to cover this range is set for
120 secs. Set RF2SLM EE.3446 = 0 for 1/10
bit/sec rate and RF2NRT EE.3451 = ((6000 -
1291)/120)*10 = 392.
Tracking delay, set RF2WLG EE.3447 = 50
4-5.5.3. FVR OPERATION. The field regulator
adjust command MFLDADJ VAR.165, which
normally originates as the REF2 output or a
reference signal from the AVR, becomes the
reference for the field regulator. This reference
feeds a summing junction. A feedback signal
representing IFE is subtracted from this reference to
give an error signal (FLOPERR VAR.1003) for the
PI regulator. The output of the field regulator
(FLOPO VAR.1004) goes to a minimum value gate
where it is compared with the field current regulator
output (ILOPO VAR.1002). The minimum of the
two becomes the net firing command (FIRCMD
VAR.1000).
EX2000 PWM Digital Exciter GEH-6375
51
4-5.5.4. FVR SCALING. The field regulator is
set to cancel the effects of the time constant of the
rotating equipment by setting Kp/Ki = Td0 of the
exciter. With the loop gain set to unity, the transfer
functions of the inner loop reduce to be Ki =
(2*pi*f*VFFL
ex
@75 C)/(Bridge Gain*5000). The
bridge gain is the actual DC link voltage divided by
11775, maximum firing command counts.
The field regulator bandwidth for the EX2000 PWM
regulator is chosen to be 10 Hz.
In the example system, VFFL
ex
is 9.54 * 5.810 =
55.4. The bridge gain is calculated as 137
volts/11775 or .0116. Ki is calculated to be
(2*pi*10*55.4)/(.0116*5000) = 60 Set FLDIG0
EE.1551 = 60*65.536 = 3932 counts.
Since Kp/Ki was set to equal the time constant of
the exciter, in the example system, Kp = Ki *0.35 or
21. From this, EE.1550 FLDPG0= 21 * 256 = 5376
counts.
FLDTGO EE.1547 sets the tracking filter for 2 secs.
Set EE.1547 = 1/2 * 65.536 =33 (where 65.536 = 1
rad/sec)
4-5.5.5. TRANSFER TRACKING METER AND
BALANCE. There is automatic tracking between
the manual and automatic regulators in either
direction with independent tracking delays. A
balance meter is normally provided on the operator
station to show the amount of unbalance that exists
between the regulators. While in the auto regulator,
the unbalance is shown as the magnitude of exciter
field voltage unbalance that exists. If a transfer is
made at this time to the manual regulator, the exciter
field voltage jumps by this amount. While in the
manual regulator, the balance is shown as the
generator terminal voltage unbalance that exists.
4-5.6. Field Current Regulator (FCR)
The Field Current Regulator (FCR) is programmed
within the MCP Block. This regulator is also a
proportional plus integral (PI) regulator. The FCR
has a feature that allows for two sets of proportional
and integral gains to be entered. The FCR can then
be switched between these two sets of gains through
a command (EFA@EN) to the Core Block. These
two sets of gains are referred to as the primary field
current regulator and the alternate field current
regulator. The primary current regulator is enabled
when FCR@EN EE.3706 is true. The alternate
current regulator is enabled when both EFA@EN
EE.3705 and FCR@EN are true.
The EX2000 PWM uses both of these current
regulators as an Overexcitation Limiter (OEL) to
limit exciter field current (and therefore main
generator field current). The alternate FCR gains
and primary FCR gains are set exactly the same as
the field regulator gains since the field regulator in
the EX2000 PWM is configured as a current
regulator. The alternate current regulator is always
enabled unless an extended forcing condition is
detected, and is used as an instantaneous current
limit. It has two setpoints, one for on-line and one
for off-line operation. The primary current regulator
is used as an inverse time limiter. Forcing is
allowed for up to 10 seconds. If forcing is
maintained for 10 seconds, the alternate current
regulator is disabled with control switching to the
primary regulator. The primary regulator will then
drop the current to its on-line setpoint until the
inverse time block activates and then control is
limited to 1 pu exciter field current.
In the off-line situation, instantaneous exciter field
current is limited to 125% (or less) of AFNL
ex
to
prevent overfluxing the generator and connected
transformers. On-line, the instantaneous current is
limited to prevent heating (I
2
t) damage to the main
field winding. However, it must allow proper field
forcing for fault support before beginning its current
limit function.
When either the primary or alternate current limiter
takes control of IGBT bridge gate firing, an OEL
Active annunciation is displayed on or sent to the
operator interface. The control of bridge firing is
determined by a function referred to as a minimum
value gate. The field regulator cannot resume
control of bridge firing until the firing reference
generated by AVR or FVR becomes lower than the
firing signal limit out of the current regulator. See
Figure 3-8.
GEH-6375 EX2000 PWM Digital Exciter
52
4-5.6.1. ALTERNATE FCR. Off-line, the
alternate FCR limits the exciter field current to
protect against overfluxing the machine and any
connected transformers. It is a backup V/Hz limit
with the actual V/Hz limiter in the excitation
autosetpoint block serving as a primary limiter. On-
line, the alternate current regulator serves to limit
the exciter field current to a level that protects the
rotating diodes in the brushless exciter.
The alternate field current regulator is enabled
whenever EFA@EN true. Until the generator
output breaker is closed, it will limit field current to
the value in EE.82, the off-line instantaneous
setpoint. Once the 52G breaker closes, the alternate
current regulator limit is switched to the value in
EE.80.
As stated before, since the field regulator (FVR) is
configured as a current regulator in the EX2000
PWM, the proportional and integral gains for the
alternate current regulator are identical to those in
the FVR.
4-5.6.2. ALTERNATE FIELD CURRENT
REGULATOR SCALING. EE.1541 IRGKA0 is
the alternate FCR proportional gain. From the
calculations for the FVR in the example system, Kp
for the current regulator is 21. EE.1541 will then be
the same as EE.1550 = 256*Kp = 5376.
EE.1543 IRWIA0 is the alternate FCR integral gain.
From the calculations for the FVR in the example
system, Ki for the current regulator is 60. EE.1543
will then be the same as EE.1551 = 65.536*Ki =
3932.
EE.1545 ILOPA0 is the alternate FCR preset value.
In the EX2000 PWM, this is chosen to be 120% of
the firing command for exciter field AFNL. For the
example system, this would be (1.2*VFNL
ex
@25
C*11775)/actual DC link voltage. EE.1545 =
(1.2*3.52*4.871*11775)/137 = 1768 counts.
The off-line setpoint for the alternate current
regulator is stored in EE.82. This value is 125% of
AFNL
ex
which for the example system would be
1.25*3.52/5000 = 2306 counts.
The on-line setpoint for instantaneous current limit
must allow for forcing of the regulator during
system transients. Generally, calculations are made
that specify a ceiling from the exciter to support 2
pu capability from the generator. The rotating
exciter diodes can be a limiting factor in what this
on-line forcing capability is. In the EX2000 PWM,
this current level is conservatively chosen to be the
maximum of either 140% AFFL
ex
or twice AFSI
ex
unless a higher value is specified by the original
equipment manufacturer. In the example system,
1.4 * AFFL
ex
= 13.356. Two times AFSI
ex
= 2 *
6.236 = 12.472. There is also a specified ceiling
limit of 14.45 amps. EE..80 will then be 15.45 *
5000 /9.54 = 8097 counts. Before changing this
instantaneous limit to a higher value, GE generator
engineering should be consulted.
An off-line protection block, PRITC, is provided as
an instantaneous trip if the pickup setpoint is
exceeded when the EX2000 PWM regulator senses
the unit is off-line. It is set to a value above the off-
line alternate field current regulator setting. If this
level is reached, the regulator will immediately stop
IGBT gating.
The PRITC block is set up for linear error with pure
integration (1 sec integration time). The pick up
value is set to 1.25 AFNL
ex
with the limit being
activated as soon as the pickup level is exceeded.
Set PITJMP = 2. This sets the PRITC block for
excessive I*t function .
Set PITPU = 125% of AFNL
ex
For the example
system 1.25*(3.52/9.54)*5000 = 2306 counts the
PRITC begins to accumulate when PITPU is
exceeded.
PITTRP is set such that the unit will stop gating at a
value of 160% of AFNL
ex
. For the example system,
this would be 645 counts. The trip setting is counts
above the pick up level for a trip.
EX2000 PWM Digital Exciter GEH-6375
53
4-5.6.3. PRIMARY FCR. The primary field
current regulator is used to limit main generator
field current to a value so as not to exceed the
thermal capability of the field copper. This limit
must be imposed on the EX2000 PWM output
current into the exciter field in order to limit the
calculated main generator field current. The
setpoints of the primary FCR are generally set to
125% of AFFL
ex
until the inverse time protection is
enabled and then output current is limited to 1 pu
AFFL
ex
.
Forcing on-line is allowed until the reference level
stored in a signal level detector (SLD1) is exceeded
for 10 seconds or by a protection inverse time block
being in limit (PIT1LIM = true). The SLD level is
set for 140% of AFFL. The protection inverse time
block, PRIT1, is set to begin timing at 1.06 pu
exciter current and will activate the second level of
field current at 1.25 pu after 60 seconds. The field
regulator setpoint must be lowered below the level
of the field current regulators in order to release
control from the FCR or FCA.
4-5.6.4. PRIMARY CURRENT REGULATOR
SCALING AND CONFIGURATION. EE.1540.
IRGKC0 is the primary FCR proportional gain.
From the calculations for the FVR in the example
system, Kp for the current regulator is 21. EE.1540
will then be the same as EE.1550 = 256*Kp = 5376.
EE.1542 IRWIC0 is the primary FCR integral gain.
From the calculations for the FVR in the example
system, Ki for the current regulator is 60. EE.1542
will then be the same as EE.1551 = 65.536*Ki =
3932.
EE.1548 ILOPP0 is the primary FCR preset value.
In the EX2000 PWM, this is chosen to call for full
gating of the IGBT bridge. In the example system,
this would be 11775 counts.
The high level setpoint for the primary current
regulator is stored in EE.83. This value is 125% of
AFFL
ex
which for the example system would be
1.25*5000 = 6250 counts.
After the PRIT1 block times out, the current will
then be reduced to the lower level setpoint for the
primary current regulator which is stored in EE.81.
This value is 100% of AFFL
ex
which is equal to
5000 counts.
For SLD1, the level that the input (IFE) is to be
compared with is set in EE.152 SL1LEV. This
value is set to 140% of AFFL
ex
or 7000 counts.
SLD1 pickup time delay EE.154 = 1000 (for 10
second pickup)
The PRIT1 is an inverse time protection block. The
scaling is set on a per unit basis of AFFL. As all
machines are scaled to produce 5000 counts at
AFFL then the values should not change on an
individual job basis. The PRIT1 block is scaled for
I*t function with a sixty second leaky integrator.
Set EE.3749.0 PITJMP = 0 This sets the PRIT
block for excessive I*t function (protect for field
heating).
Set EE.3749.1 = 0 This sets the PRIT block with a
60 second integrator.
Set EE.3751 PITPU = 5100 which is 102% of
AFFL
ex.
The protection block will begin to integrate
when PIT@IN exceeds 102% AFFL.
Set PITDEL EE.3755, integrator leak gain to 16122
counts. This setting allows the PRIT1 block to
begin accumulating but never reaches a point where
it will generate a trip. Essentially sets the
accumulation level to 1.06% of AFFL
ex
.
A trip level can be set in PITTRP EE.3752. If a trip
is used, a setting of 783 will cause a trip signal
output in 120 secs at 112% AFFL
ex
and 42.3 secs at
125% of AFFL
ex
.
A transfer level can be set in PITTRF EE.3753 If a
transfer is used, a setting of 666 will cause a transfer
action at 85% of the trip level.
PITDEL is set to 0 in EE.3755 so that pure
integration is used. A constant error signal will
produce a linear ramp of (PIT@IN -PITPU)
counts/sec.
GEH-6375 EX2000 PWM Digital Exciter
54
4-6. OPTIONAL FUNCTIONS SCALING AND
CONFIGURATION
Several optional functions are available with the
EX2000 PWM regulator on brushless exciters.
These include exciter field temperature calculation,
field ground detection, and 4 - 20 ma output
transducers. The requisition specific elementary
should be consulted to determine which, if any, of
these options have been supplied.
4-6.1. Transducer Outputs
The DAC1, DAC2, MET1, and MET2 analog
outputs are available for test purposes and are
typically used as the input reference for up to four
isolated 4-20 ma output transducers. The four
outputs operate identically and are programmed
similarly to the variables in Test 11. DAC1 and
DAC2 have 12 bit resolution and are updated 720
times per second. MET1 and MET2 have eight bit
resolution and are updated 360 times per second.
Each output has two addresses (see Table 4-1).
The @I address selects the variable to be output
(EE100 = DAC1, EE102 = DAC2, EE104 =
MET1, and EE106 = MET2)
The MX address is the maximum input value
(EE101 = DAC1, EE103 = DAC2, EE105 =
MET1, and EE107 = MET2)
DAC1 and DAC2 can be offset by the values
stored in DAC1OF and DAC2OF
For example, to bring up this function:
1. In the Parameter Mode, call up EE100-DAC1
and EE101-DAC1MX (select EE.100).
2. Enter the signal to be monitored into EE.100.
Putting that RAM address in EE.100 produces that
signal at the NTB/3TB boards DA1 testpoint and
DAC1 terminal (3TB-53).
DAC2, MET1, and MET2 function like DAC1.
When a signals RAM address is loaded into the
DAC and MET addresses, the signal is output on the
NTB/3TB testpoints and terminal points listed in
Table 4-1.
Typically, the DAC and MET outputs are assigned
with exciter volts (VFE), exciter amps (IFE),
transfer volts, and occasionally exciter field
temperature. Consult the elementary for the specific
requisition to see which transducers are supplied, if
any. Typically, DAC1 is exciter field temp, DAC2
is transfer balance, MET1 is IFE and MET2 is
filtered VFE.
Table 4-1. Diagnostic Mode Analog Output Points
Loaded into Address NTB TP Terminal Board Point
EE.100-DAC@1 &
EE101-DAC1MX
EE.108-DAC1OF
DA1 DA1, 3TB-53
EE102-DAC@2 &
EE103-DAC2MX
EE.109 DAC2OF
DA2 DA2,3TB-55
EE104-MET@1 &
EE105-MET1MX
MET1 MET1, 3TB-54
EE106-MET@2 &
EE107-MET2MX
MET2 MET2, 3TB-56
EX2000 PWM Digital Exciter GEH-6375
55
4-6.2. Ground Detector And Diode Fault
Monitor
The EX2000 PWM is capable of interfacing with a
brushless regulator field ground detector module.
There are several different styles of ground
detectors available, some with multiple inputs to the
EX2000 PWM, some with only one input. The most
common of these detectors is configured as follows.
This detector requires a 24 volt supply, typically
passed through the EX2000 PWM cabinet. The
detector returns three signals to the EX2000. These
are a Ground Detector Malfunction alarm, a Ground
Fault alarm, and a Diode Fault alarm. These three
inputs are taken into the EX2000 PWM controls on
the NTB board at inputs V4VCO, FDBVCO, and
REFVCO. These inputs are configurable voltage
controlled oscillators which convert the analog input
to dc counts for use in the regulator.
The Detector Malfunction alarm signal is a nominal
2 V dc when there is no fault present. This signal is
scaled in the FBVCO and compared to a fixed
reference in a signal level detect. A high signal
(nominally 20 V dc) indicates a detector
malfunction.
The Ground Fault alarm is a nominal 10 to 24 V dc
unless a ground fault is detected. Then the input
will go to a nominal 2 V dc. This signal is scaled in
the V4VCO, compared to a fixed reference and
passed through a time delay such that the condition
must persist for up to 10 seconds. It is ANDED
with the inverse of the detector malfunction alarm.
This prevents a false ground detection if the detector
has indicated that it is not healthy. To prevent
inadvertent alarms when the unit is not operating,
the ground fault detector is not activated until the
EX2000 PWM has been running for 15 secs. It is
always disabled while in simulator mode to prevent
false alarms or inadvertant operation of the customer
lockout.
The Diode Fault alarm sends a one hertz, 0 to 24
volt squarewave to the EX2000 PWM. This signal
is scaled in the REFVCO. It is then sent to two
signal level detectors. One checks for a
continuously low voltage which indicates a diode
fault. The other checks for a continuously high
voltage which indicates a diode monitor fault.
Each of the inputs and resulting signal level detect
outputs are incorporated in the global alarm string
30EX and also passed over the status S page.
4-6.2.1. GROUND DETECTOR AND DIODE
FAULT SCALING AND CONFIGURATION.
The Ground Detector Malfunction input is scaled in
the FBVCO. The feed back VCO scale factor
EE.1386 FVSCL0 is set to a value of 10000. This
scales VAR.183 to a nominal 20000 counts with an
input of 20 V dc. EE.180 SL5LEV is the level that
the input variable from the FBVCO is compared to.
This is set to a value of 18000. The mode of the
level detect is set to a 0 in EE.178.11 SL5MODE.
The level detect will then pick up when the input is
greater than or equal to the sensing level. The level
detect time delay is set to 0.5 seconds with a setting
of 50 in EE.182 SL5PUT.
The Ground Detection input is scaled in the
V4VCO. The V4VCO scale factor EE.488 V4SCL0
is set to a value of 10609. This scales VAR.185 to a
nominal 20000 counts with an input of 24 V dc.
This variable is compared to EE.74 in the CMPR1
block. EE.74 is a general purpose register and is set
to a value of 2000 counts. If the output of V4VCO
is greater than 2000 counts, then there is no ground.
The delay of 10 seconds is set in the ONDLY3
block at EE.5670 ONDLY3. This is set to a value
of 1000 for a 10 second delay.
The Diode Fault input is scaled in the REFVCO.
The feed back VCO scale factor EE.1281 RVSCL0
is set to a value of 10000. This scales VAR.182 to a
nominal 20000 counts with an input of 20 V dc.
For a diode monitor fault detection, EE.187
SL6LEV is the level that the input variable from the
RFVCO is compared to. This is set to a value of
18000. The mode of the level detect is set to a 0 in
EE.185.11 SL6MODE. The level detect will then
pick up when the input is greater than or equal to the
sensing level. The level detect time delay is set to 2
seconds with a setting of 200 in EE.189 SL6PUT.
For a diode fault detection, EE.194 SL7LEV is the
level that the input variable from the REFVCO is
compared to. This is set to a value of 2000. The
mode of the level detect is set to a 4 in EE.192.11
SL7MODE. The level detect will then pick up when
GEH-6375 EX2000 PWM Digital Exciter
56
the input is less than the sensing level. The level
detect time delay is set to 2 seconds with a setting of
200 in EE.196 SL7PUT.
4-6.3. Field Thermal Model
The EX2000 PWM monitors the temperature of the
exciter field windings by calculating the field
winding resistance from the measured values of
exciter field voltage and exciter field current. In
simulator mode, the model uses the simulated values
of field voltage and current.
From the calculated field resistance, the temperature
of the windings is calculated using the resistance
formula for copper. This temperature is stored in
VAR.1011, where it is displayed in degrees
centigrade. It can be read directly or sent over the
LAN to the operator station.
4-6.3.1. THERMAL MODEL OPERATION.
The voltage feedback, VFE (VAR.1014), passes
through a limiter that restricts it to positive values.
This prevents negative values of resistance from
being calculated. The resulting voltage signal is fed
through a filter that matches the field voltage to the
associated field current. This is accomplished by
producing a lag that approximates the lag
experienced by the field current due to the field time
constant. The amount of lag is set using EE.1596
EFLTCO.
A switch is used to select either field voltage or a
value of zero. Field voltage is the output if bridge
firing is detected (VAR.882 MPWRENAB is true).
This signal becomes the numerator in a divide
function.
The field current IFE (VAR.1016), after passing
through a filter, feeds a limiter that only passes field
current values greater than 500 counts. The signal
then becomes the denominator of the divide
function. The result of the divide function is the
field resistance in counts. Restricting the
denominator to values above 500 counts eliminates
the possibility of division by zero.
The resulting resistance count value is normalized to
Kelvin degrees by multiplying by a scale factor set
EE.1594 ERTSFO. The Kelvin degrees are then
converted back to centigrade by subtracting 235.
The temperature, now in degrees centigrade, is
filtered and passed though a limiter that restricts the
output temperature range to 0 to 300. The
temperature is output as VAR.1011 EFG, scaled at 1
count equals 1 C. Due to the time constants, field
temperature is not accurately modeled during startup
and shutdown of the exciter.
4-6.3.2. THERMAL MODEL SCALING. The
example system uses VFE and IFE as the feedback
variables. The model parameters to be set are
ERTSF0 and EFTLC0.
EE.1594 ERTSCO - Exciter thermal model
resistance to degrees scale factor is set = (32 * Max
V dc link * 5000 * (234.5+t1)) /
(AFFL
ex
*20000*(Rf@t1) From the sample data:
DC link volts = 360 V dc; AFFL
ex
= 9.54 A dc ;
Rf@25C = 4.871 ohms.
EE.1594 =
32*360*5000*(234.5+25)/(9.54*20000*4.871) =
16082 counts.
The exciter lag field time constant is set by
EE.1596. From the sample data, the open circuit
exciter field time constant is 0.35 seconds. It will be
set to (4096 * 0.458752)/ (Tdo exciter).
EX2000 PWM Digital Exciter GEH-6375
57
WARNING
CHAPTER 5
STARTUP CHECKS
5-1. INTRODUCTION
This chapter contains basic checks to perform after
installation and during initial startup. Consult and
study all furnished drawings and instructions before
starting installation. These include outline
drawings, connection diagrams, and elementary
diagrams. For installation details, refer to
applicable sections of GEH-6011 and GEI-100228
Receiving, Storing, and Warranty Instructions.
These checks are not intended as complete
commissioning instructions for the EX2000 PWM
regulator, but serve as a guide for the sequence of
tests and a description of functions and devices
requiring field tests.
Before application of any power source
to this equipment, be sure that no tools
or other objects left over from
unpacking or installation are present in
the cabinets, including the bridge
assembly.
5-2. EX2000 PRESTART CHECKS
Each EX2000 PWM is thoroughly tested before
shipment. This testing process should ensure that
the regulator will perform properly upon receipt and
loading of requisition specific software.
A complete inspection of the EX2000 PWM
regulator and associated equipment should be
performed prior to energization of any portion of the
regulator controls. Items to look for are shipping
damage to wiring or circuit boards, installation
damage or foreign objects from the
installation process, contamination due to improper
storage, and loosening of connections and
components.
Proper grounding and separation of wiring levels
should also be maintained. Ensure that the ground
connection is sized properly and is connected to a
suitable ground point.
5-2.1. Energization And Simulator Control
Checks
The following steps are intended as guide for
installation and initial startup of the EX2000 PWM
regulators. Site specific procedures should
incorporate these steps to ensure completeness.
1. Verify hardware, proms, and board revisions
using the ST2000 or Control System Toolbox
and job specific software supplied with the
equipment. Hardware to check includes the
shunt supplied, dynamic discharge resistor,
charge control resistor, and options supplied.
If changes to proms or circuit boards are
required, a Full Calc in ST2000 or Control
System Toolbox may be needed. Contact GE
Motors & Industrial Systems before changing
any values generated by the Full Calc if unsure
of the correct settings.
2. Verify jumpers and switch settings as specified
in ST2000 or Control System Toolbox and the
requisition elementary. If changes are made,
update the application tool databases to keep an
accurate documentation of the regulator.
3. Perform a complete wire check of all external
connections to the EX2000 PWM. Inspections
for unintentional shorts, induced voltages,
correct wiring ampacities, and the like should be
GEH-6375 EX2000 PWM Digital Exciter
58
made. This will include PT and CT inputs, alarm
contacts, trip contacts, and connections to the
operators interface device. Ground detector
connections and other optional equipment should
also be checked.
4. With input disconnects open, check incoming ac
and dc power for proper levels and polarities.
On units with a PMG input, it may not be
practical to check the PMG inputs until initial
roll of the equipment. At a minimum, a complete
wire check of the inputs should be performed.
5. Energize the dc power supply feed to energize
exciter regulator controls. The EX2000 PWM
will go through an initialization process. During
this initialization process, hardware and firmware
diagnostic checks are performed. Any faults
generated during the initialization should be
corrected before proceeding. If an IOS or
UC2000 is supplied on the system,
communication faults will not be cleared until
the IOS or UC2000 is operational.
The LDCC display will default to its normal, de-
energized state. It should appear similar to the
following.
A S 97% I 0 %
The PSCD board has several LED indications of
power supply levels and test points for checking
the output of the regulator supplies. Check these
testpoints for appropriate voltage levels. Refer to
the ST2000 help messages or the individual
board GEI instructions for test points and
voltages.
The DC link voltage should also be checked.
Variable VAR.1091 should read the
corresponding voltage in engineering units and
should agree with the level measured. On the
IAXS board, connections PL and NL are the
positive and negative link voltages respectively.
6. Turn off the dc supply and repeat the PSCD
supply voltage checks for the ac feed to the
EX2000 PWM regulator. The PSCD board
voltages will be the same as for the dc feed. The
DC link voltage will generally be different than
the DC link with only the dc supply voltage.
Phase rotation of the ac input is not important in
the EX2000 PWM regulator. But phasing should
be checked to ensure accuracy in as built
drawings. If a single phase ac input is used, it
must be connected to L1 and L3 leads of the ac
input device.
If voltage doubling is required, the connections
on CTBA-3 and CTBA-4 should be made. Refer
to the control elementaries for proper
connections.
After independent proper operation with both the
ac and dc source voltages are observed, both
power sources should be energized at the same
time. Elimination of either source should have
no noticeable affect on the EX2000 PWM
regulator. Only the dc link voltage may be
affected. This check should be performed during
power checks and on-line operation as well.
7. Using ST2000 or Control System Toolbox,
download the appropriate core file to the
EX2000 PWM regulator. After the download is
complete, the regulator will again perform a
diagnostic check.
8. In order to thoroughly test the operation of the
EX2000 PWM regulator, operation in the
simulator mode is recommended. Place the
control core in the simulator mode (EE.570.0=1).
See Chapter 6 for operation and scaling
information of the simulator. It is also
recommended that as much testing be performed
in simulator mode as possible. This should help
shorten the pre-startup and initial roll checks
greatly since control functions, alarms, trips, etc.
will have been tested and verified correct.
NOTE
In the simulator mode, the EX2000 can
generate a request for lockout. This can
trip the lockout relay unless the
function is disabled.
EX2000 PWM Digital Exciter GEH-6375
59
9. It may be necessary to place temporary jumpers
on inputs to simulate breaker closures or start
permissives that may not be operable at this time.
One such input is to reset the lockout relay (86)
or place a temporary jumper to simulate lockout
relay. Refer to hardware elementaries for
specific jumpers required. If temporary jumpers
are used, it is important to remember to check the
operation of these inputs from the actual devices
at some point during the pre-start process.
10.If the operators station device is available, a
start from this device may be given and proper
operation of the controls should be tested and
observed. Raise and lower signals, alarms,
limits, displays and transducer outputs are
available in the simulator mode.
11.Close or jumper circuit breaker auxiliary contact
(52G) input to simulate on-line operation.
Change EE.84 value to simulate higher turbine
load. UEL settings can be checked by increasing
EE.84 lowering the regulator output, and
comparing to the capability curve.
NOTE
Return EE.84 value to
(152*frequency/60) before opening the
52G contact or the simulator will
overspeed and cause a trip.
12. Verification of the operation of the on-line and
off-line OEL Limiters can be accomplished through
the use of the built in simulator and ST2000. A
convenient way to do this is to utilize the two input
summation (2 Input Sum) block that is programmed
between the REF2 block output and the CORE
block EFR@SP input. EFR@SP is the setpoint for
the field regulator. The summation block was added
to the pattern for test purposes only. Input 1 of this
block is the normal field regulator reference
supplied by REF2 output. Input 2 can be pointed to
the output of the background test oscillator. In this
manner the regulator can be easily stepped.
a. Off-line OEL
While in manual regulator, raise the
excitation level until the field current exceeds
the off-line OEL pickup level. The system
goes into off-line OEL. Lower the reference
to see that the OEL condition resets. Step the
reference into OEL and observe the response.
Return the summation block test input to zero.
b. On-line OEL
While in manual regulator and with about
90% MW load, increase the VARs until field
current is above 112% of AFFL. The PRIT1
block begins to accumulate and after a time
delay activates the OEL limiter. Lower the
setpoint and then step the reference so that the
system goes back into on-line OEL. Observe
the response and be aware that if a very large
step is used, the signal level detector pickup
level is also exceeded. After 10 seconds, the
exciter field current will be limited to 125%
of AFFL
ex
and when PRIT1 times out it will
limit to 100% of AFFL
ex
.
After completion of the tests, be sure to disconnect
the test oscillator.
5-3. PRE-START POWER CHECKS
1. After proper simulator operation, remove the
control core from simulator mode. As described
in section 4-4.4 Feedback Offsets, the inputs
from the current and voltage feedbacks should be
adjusted.. These offsets are found in location
EE.1508 through EE.1513. In simulator mode,
these values are not in use and therefore do not
affect the simulator operation.
2. Check PT and CT inputs by applying an input
signal with a 3-phase source at rated PT
secondary volts and CT secondary current. The
operator station device should display rated
terminal volts. Internal control variables for PT
and CT feedbacks should be verified for proper
scaling. If supplied, a PT failure can be checked
by opening the primary switch and observing a
transfer to the backup PTs or a transfer to the
manual regulator.
GEH-6375 EX2000 PWM Digital Exciter
60
3. It is recommended that the brushless exciter field
be used for initial power tests. There should be
no detrimental effects to using the exciter field as
a load since the unit is not rotating and can not
produce generator field voltage. If the exciter
field is not available, a suitable replacement load
must be used. This dummy load has to be
inductive. If a simple resistive load is used the
control will trip on instanteous over current
before the regulator can limit the current. Since
the EX2000 PWM regulator is a current
regulator, it should be sized to carry at least
AFFL
ex
in order to keep as many EE settings at
the requisition levels as possible. Choosing a
smaller current load will require adjustment of
several operating parameters.
4. Place the controls in manual regulator. Connect
an oscilloscope and voltmeter to the output load
leads. Incorrect shunt wiring can cause the
EX2000 PWM regulator to turn full on in manual
mode. Verify shunt connections with a millivolt
source, observing proper polarities, before
starting.
Again, test jumpers or operation of the 86G
device will be required to run the EX2000 PWM
regulator into the exciter field or replacement
load.
5. Upon starting the regulator, exciter field current
should develop to approximately 80% AFNL.
Immediately stop the controls if any unusual or
abnormal operation occurs. Operation in the
automatic regulator is not recommended since
the regulator will be open loop and be very
difficult to control.
6. Measure field voltage and current and compare
to the operator station display values. Use
ST2000 or Control System Toolbox to check the
VCO output counts for proper values. While the
scaling can be adjusted to give the desired counts
for the indicated voltages or currents, it is
generally an indication of improper scaling or
jumper settings when these values are not in
agreement.
7. Check field output waveshapes using an
oscilloscope. Observe for stable operation at low
and full output voltages. The display should be a
square wave similar to Figure 5-1. As output is
raised, the on-time will increase as the off-time
will decrease. The upper and lower peaks of the
square wave will be equal to the dc link voltage.
DC LINK LEVEL
O VOLTS LEVEL
LOW OUTPUT HIGH OUTPUT
Figure 5-1. Typical Output Wave Forms
EX2000 PWM Digital Exciter GEH-6375
61
8. Use the method outlined in the OEL simulator
testing section 5-2, step 12 to verify off-line and
on-line OEL limit and regulator stability. A
jumper for the 52G input will be required to
simulate on-line operation. It will not be
necessary to simulate MWs on the EX2000
PWM regulator. Raising the output current to
the OEL settings should result in OEL limiter
operation as described. For checks without the
actual exciter field, it is possible to simulate
higher current levels by changing the value in
EE.1505. This value should be restored to the
original setting after testing. If found to be
unstable, contact GE Motors & Industrial
Systems for any changes in settings.
9. Restore values and reconnect for normal
operation. Check temporary inputs, jumpers and
EE values and restore to the desired operational
settings. The unit is now ready for off-line,
initial roll system checks.
5-4. INITIAL ROLL OFF-LINE CHECKS
1. Run the unit up to synchronous speed. At this
time the PMG input may be available for the first
time. Before applying the PMG input, measure
and observe correct PMG inputs. Refer to
applicable PMG instruction manuals for more
information.
2. With the EX2000 PWM regulator in manual
control, start the exciter. The unit should come
up to approximately 80% amps field no load.
This should result in a build up of generator
terminal voltage no greater than rated terminal
volts when operating at rated generator
frequency.
3. Refer to applicable instruction manuals for initial
startup checks for the rotating portions of the
brushless exciter and main generator. This
should include ground detector operational
checks as well.
4. Check phasing of the PT inputs. CT inputs will
not be available at this time. Measure for correct
secondary values at rated generator terminal
volts. Negative generator frequency counts are
indicative of improper phase rotation of the PT
inputs.
Check for the values of exciter field volts and
exciter field current at no load used to scale the
exciter. Measure the actual field volts and field
shunt millivolts. The measured values, counts
and operator station display values should be in
agreement.
5. Step tests of the exciter field regulator should be
performed to ensure stable operation. Step test
the field voltage regulator using the input
summing block as described in the OEL
simulator testing.
6. Transfer to automatic regulator. The transfer
should be smooth and without any noticeable
fluctuations in generator or regulator operation.
The AVR can be stepped by pointing the extra
reference in the Excitation Autosetpoint Block
(EE.3781 ASP@EX) to the output of the test
oscillator. Generally a 2% step (400 counts) is
sufficient. Verify stability of the AVR.
7. Give the regulator a stop command. With the
unit in automatic regulator, restart the exciter and
watch for proper operation. The EX2000 should
bring the generator to rated terminal volts (or the
setting of the EE.3402 pointer).
8. The V/HZ regulator function can be checked by
slowing the generator and, while in automatic
regulator, watching the ac terminal volts drop
accordingly. A 1.10 pu ratio should not be
exceeded.
The EX2000 PWM regulator is now ready for on-
line operation. Return the unit to rated terminal
volts. Initial synchronization checks for other
equipment may be required at this time.
GEH-6375 EX2000 PWM Digital Exciter
62
WARNING
5-5. ON-LINE CHECKS
1. It is recommended that the unit be synchronized
in manual regulator the first time. The CT inputs
to the EX2000 PWM regulator can adversely
affect the automatic regulator operation if they
are not correct. Once the unit has been
synchronized, increase the unit load for a small
amount of generator line current.
Check the MW and MVAR displays for positive
values. If they are negative, the CT leads
connections may be reversed. This condition
should be corrected before proceeding. If there
are no CT disconnects, the unit must be off-line
to reverse/change CT connections.
Reversing CT leads with the unit under
load can cause substantial damage to
generator components. The unit must
be off-line, 52G open, before correcting
CT lead polarity.
2. After correct displays of MW and MVars has
been ascertained, place the regulator in
automatic. For units without PT failure
detection, remove the main PT input by opening
the disconnect switch (if supplied) or pulling the
PTCT board input connection plug. This
generates a PT undervoltage alarm. The operator
station display should indicate that the regulator
has transferred to manual, and can not be placed
into automatic. A 30EX global alarm should be
generated. Restoring the PT input and operating
the PT BAD reset will allow a return to
automatic. Activating the automatic regulator
selection should again place the exciter in
automatic regulator. The 30EX alarm should be
clear.
Two PT inputs are required for PT failure
detection. Opening the main PT will generate a
PT failure alarm but the unit will not transfer to
manual. It will continue regulation on the
secondary set of PTs. Restoring the main PT
input will clear the PT bad alarm.
Removing only the secondary PT input will
generate a PTX alarm but will not transfer the
unit from automatic to manual. Restoring the PT
input will clear the alarm.
Removing both the primary and backup PT
inputs will generate the PT undervoltage alarm
and the restoration process described above
should be followed.
3. Check UEL operation. The simulator checks
should be sufficient to guarantee proper
operation of the UEL at the desired setpoints as
long as the line current and line voltage count
values are correct. Many customers may require
verification of the actual UEL limit line. If this
is needed, the UEL stability should be checked
first.
Stability of the UEL can be checked by raising
the UEL setpoints to a value of just slightly
underexcited. The values of EE.2872, EE.2865,
EE.2867, and EE.2869 should be set to negative
250 counts. Lower the excitation slowly until
the UEL regulator takes over at the revised
settings. The EX2000 PWM regulator can then
be stepped into the UEL regulator using the extra
input to the auto setpoint block as described in
section 5-4, step 8. This will verify that the UEL
operation is stable. Contact GE Motors &
Industrial Systems if any instability in the UEL
regulator is encountered.
If at any time undesired operation is observed, a
transfer to manual regulator should correct the
condition. After verification of UEL stability,
the original UEL setpoints should be restored. If
the customer desires testing of the actual UEL
limits, the excitation can be slowly lowered into
the limit.
4. The on-line OEL testing performed in section 5-
3, step 7 should be sufficient. To perform the
same test on the actual machine requires
operation at very high field current levels. GE
Motors & Industrial Systems does not
recommend that the equipment be actually driven
into OEL. If it is required, contact GE Motors &
Industrial Systems.
EX2000 PWM Digital Exciter GEH-6375
63
After completion of all EX2000 tests, restore all
storage registers used for testing to normal
values, back up the software, and disable all
write enables.
As the unit is loaded, check for reactive sharing
between paralleled units. Reactive current
compensation can be introduced through the AVR
setpoint block by changing the gain of the RCC.
See EE.3791 help for changing the RCC gain.
5-6. OPERATOR INTERFACE
The EX2000 PWM regulator is a versatile regulator,
capable of communicating with several different
Human-Machine Interfaces. Direct communication
with the GE turbine control is the standard, primary
operators station and interface to the EX2000
PWM. The communication configuration is defined
and standardized within both the turbine controller
and the EX2000 PWM. Changes to the Status S
page and communication settings should be made
only under advisement from GE Motors and
Industrial Systems.
Check out of the Status S communications should be
carried out in conjunction with the turbine control
startup procedures. Usually it is sufficient to verify
control of operator functions as described on the
interface control panel or screen.
5-6.1. Units With UC2000 or IOS
All UC2000s and IOSs are factory-tested and
operable when shipped to the installation site. Final
checks should be made after installation and before
starting the UC2000/OC2000 combination or the
IOS. Consult the appropriate equipment GEH for
guidelines for inspections to perform prior to
startup.
GEH-6335 Operator Console 2000 Operation
and Maintenance
GEH-6334 Unit Controller 2000 Operation and
Maintenance
GEH-6122 Intelligent Operators Station
Operation and Maintenance
5-6.2. Units With Discrete Switches And
Meters
Testing of contact inputs and outputs from discrete
meters and switches should include a thorough
wiring check for continuity and no direct shorts
before powering the devices from the EX2000
PWM. Normal startup checkouts will ensure correct
connections and operation of the devices.
GEH-6375 EX2000 PWM Digital Exciter
64
Notes:
EX2000 PWM Digital Exciter GEH-6375
65
CAUTION
CHAPTER 6
SIMULATOR SCALING AND OPERATION
6-1. EX2000 PWM SIMULATOR
A simulator is built into the EX2000 PWM that can
model a generator and brushless excitation system
off-line or on-line (connected to an infinite bus).
Simulator operation is selected by setting
EE.570.0 = 1. When selected, the feedbacks
presented to the control regulators are switched, by
software, from the real feedback inputs to feedbacks
derived by mathematical models mimicking the
generator and field circuit behavior.
The EX2000 PWM controls react in a manner close
to the way they would react in normal operation.
The simulator can serve as a valuable startup,
maintenance, and training tool.
The simulator is scaled to represent the actual
system as accurately as possible. This means that
when a start command is given to the EX2000, it
follows a normal start sequence. Close commands
are sent to the bridge contactor but gating of the
IGBT devices is disabled. The controls look for
actual auxiliary contact feedbacks representing the
contactor states. If these are not correct the
appropriate faults are generated.
The generator armature and field models, as well as
the exciter stator and field models, provide the
feedbacks for exciter field voltage and current and
generator stator voltage and current. These
feedbacks are handled by the transducering
algorithms the same way real feedbacks are used to
calculate watts, VARs, speed deviation, and
frequency. If the model scaling is correct, the
display data cannot be distinguished from real data.
Main generator field voltages and currents are also
simulated internally and used for correct model
operation.
The exciter regulator can be raised and lowered in
automatic or manual regulator, both on-line or off-
line. The regulator limits come in at the same levels
as in non-simulated operation. The regulator
responses provide a good representation of what can
be expected of the real system in response to step
changes.
By changing the storage register containing the
value representing model shaft torque, EE.84, it is
possible to raise or lower the generator real power
output when simulating on-line operation. The
exciter changes the system VARs in response to
changes in the exciter setpoints.
Disable the IGBT gating while in
simulator mode. Check that setting of
EE.589.14 = 0.
6-1.1. Simulator Scaling
The goal of the simulator scaling is to make the
models represent, as close as possible, the behavior
of the real system.
In addition to the following EE settings, see
EE.3850 GMJMPR in section 4-3. Generator,
exciter, and regulator parameters listed in section 4-
2 for the example system will be used for scaling
discussions in the simulator section.
SMVDCL0 EE.1558 simulates the dc link voltage
of the EX2000 PWM regulator. It is set to represent
the actual running voltage of the dc link. For the
example system this is 137 V dc. For EE.1558, set
equal to 137/360 * 20000 = 7611 counts.
GEH-6375 EX2000 PWM Digital Exciter
66
SMHST0 EE.1559 is the simulated heat sink
temperature of the PWM IGBT heatsink. This value
can be used to test the overtemperature alarm and
trip levels in the regulator controls. One count
equals 1 C. Normally set to maximum expected
temperature during operation, 60 C.
GMVBAT EE.3851 represents simulator flashing
voltage. Since flashing is not required on the
EX2000 PWM regulators, set EE.3851 = 0.
GMRBAT EE.3852 represents simulator battery
resistance for field flashing. This is also not
required in the EX2000 PWM and EE.3852 is also
set to a 0.
GMVTHY EE.3853 is the simulator thyrite voltage.
This models an overvoltage protection thyrite
connected across the exciter field input. The
example system has a 125 V exciter field.
Set EE.3853 = (Exciter field class*7.2*1797)/(DC
link volts) = (125*7.2*1797)/137 = 11805.
GMRDIS EE.3854 simulates the dynamic discharge
resistance. Set EE.3854 =
(AFNL
ex
*2*RDD*30664) / DC link volts =
(3.52*2*17*30664)/137 = 26787.
GM_RFE EE.3855 is the simulator exciter field
resistance. This is set equal to (VFNL
ex
/DC link
volts) * 31108 where VFNL
ex
= AFNL
ex
*
Rfe@25C. From the example data Rfe@25c =
4.871 ohms. VFNL
ex
= 4.871 * 3.52 = 17.15 V dc.
Set EE.3855 = (17.15/137)*31108 = 3838.
GMILFE EE.3856 represents the inverse of exciter
field inductance. EE.3856 is set equal to (DC link
volts * 156) / (VFNL
ex
* Tdo
ex
). T'doex is the
open circuit field time constant which is 0.35
seconds in the example system. Set EE.3856 =
(137*156) / (17.15 * 0.35) = 3561.
GM_RFG EE.3857 simulates generator field
resistance. This parameter is normally set to 7115 *
frequency/60. The constant scaling is the result of
expected normalizations. Exciter AFNL is expected
to produce VFNL on the generator field which in
turn produces AFNL on the generator field. Set
EE.3857 = 7115 for the example, which is a 60 Hz
system.
GMILFG EE.3858 is the simulated inverse of
generator field inductance. Set equal to (60/
frequency) * 670 / T'do
gen
, where T'do is the main
generator field time constant. Set EE.3858 =
670/5.615 = 119 for the example system.
GMVFES EE.3859 is the simulator exciter voltage
scale down divider. This scales the exciter voltage
from the model to produce EXSIMFE VAR.1177
(simulated exciter field voltage). Set EE.3859 =
5888 * maximum dc link volts / dc link volts = 5888
* 360/137 = 15472.
GMIFES EE.3860 is the simulator exciter current
scale down divider. This parameter scales the
exciter current from the model to make EXSIMIFE
VAR.1176 (simulated exciter field current). Set
EE.3860 = (AFFL
ex
/AFNL
ex
)*3146 =
(3.52/9.54)*3146 = 8526.
GMVFGS EE.3861 is the simulator generator field
voltage scale down divider. This parameter scales
generator field voltage from the model to make
EXSIMVFG VAR.1163. Set GMVFGS to
27329280/ (AFNLgen * RFG@100 C* 20000 /
Maximum DC link volts). In the example system,
and simplifying the formula, this is 1367 * 360 /
(313*0.256) = 6139.
GMIFGS EE.3862 is the simulator generator field
current scale down divider. This parameter scales
generator field current from the model to make
EXSIMIFG VAR.1161 (simulated generator field
current). When used in conjunction with standard
scaling, such as AFFL = 5000 counts, set GMIFGS
= (AFFL
gen
/ AFNL
gen
) * 3146. In the example
system, this would be 846/313*3146 = 8503.
GMIFLS EE.3863 represents the simulator flashing
current scale down divider. This parameter is not
used in the EX2000 PWM regulator. Set
GMVIFLS = 0.
GMDAMP EE.3864 is the simulator generator
model damping factor where 1 count = 0.11 pu
watts/pu speed(60 Hz). Normally EE.3864 is set
equal to 400. If oscillations occur while operating
in simulator mode, try changing GMDAMP.
EX2000 PWM Digital Exciter GEH-6375
67
GM_IXS EE.3865 represents the generator model
inverse of synchronous reactance. This parameter
models the generator synchronous reactance in
simulator mode. GM_IXS = 4096/Xs(pu).
To most accurately model the generator, it is
necessary to approximate the generator synchronous
reactance from no load to full load. In a real system,
machine reactances vary with saturation and
saliency. Therefore it is necessary to make
simplifying assumptions that produce a value of Xs
that provides reasonable behavior over the range
VFNL to VFFL. Assume a round rotor machine
with no saturation, no saliency, and resistance is
negligible. This makes the direct and quadrature
reactances equal. If this level of accuracy in the
model is not of concern then Xd (the direct axis
saturated synchronous reactance) can be used.
If optimum model accuracy is of concern then the
following method, based on a simplified
synchronous machine model, can be used. The
range of field amps from no load to full load =
AFFL/AFNL=9.54/3.52 = 2.71.
If a phasor diagram showing the machine operating
at rated load and power factor connected to an
infinite bus at rated terminal volts is drawn then a
quadratic equation with the synchronous impedance
as the unknown quantity can be generated and
solved for Xs. It is then used in the above equation
for GM_IXS.
The rated power factor for the sample machine is
0.85. With the machine operating at rated k VA = 1
pu k VA then rated real power = 0.85*1 pu and
rated reactive power output = 0.53*1 pu Generator
voltage = 1 pu
As per unit values are being used it is not necessary
to use the actual generator MW and MVAR values
involved.
From the phasor diagram, the following quadratic
equation results where the generator internal voltage
range required is represented by the ratio of AFFL
to AFNL = 2.71
(2.71)**2 = (1 + 0.53*Xs)**2 + (0.85*Xs)**2
Solving for Xs gives a synchronous reactance of
2.04 pu
Set EE.3865 equal to 4096/Xs = 4096/2.04 = 2007.
GMXEXS EE.3866 models the effect of external
reactance for the simulator generator model. This
can be set for a strongly or weakly connected
system. EE.3866 is set equal to 65536*Xe/(Xs +
Xe) where Xe represents the amount of impedance
in per unit connecting the generator to the system.
For the example, set for a strong system (small
amount of impedance between generator and
system), with Xe = 0.1 pu, then EE.3866 =
65536*(0.1)/(2.04 + 0.1) = 3062.
GM_IM EE.3867 models the effect of generator
inertia for the simulator. Typically, the default
value of zero (which is equivalent to M = 3.98 pu) is
used. For more accurate simulator modeling,
EE.3867 can be set to (frequency/60)*16302/M
where M =2H, the generator inertia constant.
6-1.2. Operation
To put the control core into simulator mode set
EE.570.0 = 1. The shaft speed of the generator
increases to rated (synchronous) speed at a rate
determined by the simulator inertia constant and the
level of shaft torque preset in register EE.84. The
value of torque preset to give rated speed at no load
is 153 * (frequency/60). Rated speed is indicated on
the core programmer display as 100%. The shaft
torque can be altered on-line or off-line by changing
the value stored in EE.84. Off-line, changing shaft
torque increases the speed and hence the frequency
of the generator. Changing the torque on-line
increases or decreases the real power output of the
model generator.
To start the simulator, it is generally necessary to
wait until the simulated generator speed is above
95%. It is also necessary to have the 86G input to
the EX2000 PWM regulator closed. Failure to do so
GEH-6375 EX2000 PWM Digital Exciter
66
CAUTION
will result in a fault 29 when attempting a start.
Starts in auto or manual regulator are permissible.
The simulator can be started from the operators
station or by pressing the RUN button on the LDCC
keypad. After starting, exciter field current and
voltage and generator terminal voltage will build up
to the preset levels of the regulator being used.
Once the simulator is on-line, the 94EX
contact output can be operated
inadvertently. This may cause
unintentional operation of protective
devices outside the EX2000 PWM
regulator. Lifting of the 94EX output
contacts is recommended during
simulator operation.
To put the simulator on-line, a contact closure
simulating 52G aux contact feedback must be input
to core LTB input IN1. Some oscillations are
generally observed when closing the 52G contact
since there is no synchroscope to confirm closing
while the simulated generator and line voltages are
in phase. When off-line, changing the exciter AVR
or MVR setting adjusts generator terminal voltage.
When on-line, raise or lower signals change the
generator VARs. The result of these control
changes can be observed.
Testing of UEL settings, V/hz regulator, over
current protections, and so on, can also be observed.
Feedback and control signals from the operators
station and 4-20 ma outputs (if supplied) can also be
observed.
When stopping the simulator, the reference value in
EE.84 should be returned to the original level for
100% speed off-line. Failure to do so will result in
unusual off-line operation.
Reader Comments
General Electric Company
We welcome comments and suggestions to make this publication more useful.
Name Telephone Number
Company Name Fax Number
Address Job Site
GE Requisition Number
Publication No.
Issue/Revision Date
Todays Date
GENERAL COMMENTS
Excellent Good Fair Poor
Contents
Organization
Technical accuracy
Clarity
Completeness
Drawings, figures, and tables
Referencing and tables of contents
Readability
SPECIFIC COMMENTS (Corrections, information that could be expanded, and so on)
Page Number Comment
Other suggestions for improving this publication:
As compared to publications from other manufacturers of similar products, how would you rate this document?
Superior Comparable Inferior Do not know
Indicate the type of user/reader function that best describes you:
System Integrator Distributor OEM Installation
Programmer Maintenance Operator Other (please specify) ______________________
Detach, fold, and mail.
To:
GE Motors & Industrial Systems
Technical Publications, Room 191
1501 Roanoke Blvd.
Salem, VA 241536492 USA
.................................................................................................... Fold here and close with staple or tape ....................................................................................................
Place
stamp
here
GE Motors & Industrial Systems
Technical Publications, Room 191
1501 Roanoke Blvd.
Salem, VA 241536492 USA
.......................................................................................................................... Fold here first..........................................................................................................................
Electric Company
Issue Date: April 1997
1997 by General Electric Company, USA.
All rights reserved.
Das könnte Ihnen auch gefallen
- EX2000-Digital Exciter PDFDokument80 SeitenEX2000-Digital Exciter PDFgigelu79Noch keine Bewertungen
- Static Ex SystemDokument28 SeitenStatic Ex Systemvasanth11kvNoch keine Bewertungen
- GEH-6794-EX2100e Excitation Control Operation GuideDokument62 SeitenGEH-6794-EX2100e Excitation Control Operation GuideLê Trung Dũng100% (1)
- GEH-6795-EX2100e Excitation Control Engineering Work Station HMI User GuideDokument32 SeitenGEH-6795-EX2100e Excitation Control Engineering Work Station HMI User GuideLê Trung DũngNoch keine Bewertungen
- Geh 6414 Control System Toolbox For EX2100 Excitation ControlDokument261 SeitenGeh 6414 Control System Toolbox For EX2100 Excitation ControlSupolNoch keine Bewertungen
- GEH 6371 Unit Controller 2000VME (UC2000V) Operation and MaintenanceDokument68 SeitenGEH 6371 Unit Controller 2000VME (UC2000V) Operation and MaintenancemeirangongNoch keine Bewertungen
- GE Energy: Exciter Ac Feedback Board IS200EACFG - ADokument12 SeitenGE Energy: Exciter Ac Feedback Board IS200EACFG - AFathi YahyaouiNoch keine Bewertungen
- Geh 6415 Control System Toolbox For An LS2100 Static Starter ControlDokument245 SeitenGeh 6415 Control System Toolbox For An LS2100 Static Starter ControlSupolNoch keine Bewertungen
- GEH-6784 EX2100e System Maintenace Guide - Feb 2014Dokument76 SeitenGEH-6784 EX2100e System Maintenace Guide - Feb 2014zomglolzscribd100% (1)
- GEI-100535 Direct Modbus For Mark VI and EX2100 PDFDokument34 SeitenGEI-100535 Direct Modbus For Mark VI and EX2100 PDFmeirangong100% (1)
- GEH-6676C - Power Systems StabilizerDokument64 SeitenGEH-6676C - Power Systems Stabilizerdownloadiz100% (1)
- GEI-100667 Mark VIe Serial CommunicationsDokument4 SeitenGEI-100667 Mark VIe Serial CommunicationsjosseNoch keine Bewertungen
- EX2000 Excitation TrainingDokument441 SeitenEX2000 Excitation TrainingAnonymous NQoTtLir100% (2)
- EX2100 Excitation ControlDokument36 SeitenEX2100 Excitation ControlTaibi Zakaria0% (1)
- GEH-6421 Vol IDokument280 SeitenGEH-6421 Vol Inabil160874Noch keine Bewertungen
- EX2100e Fact SheetDokument2 SeitenEX2100e Fact Sheetnabil160874Noch keine Bewertungen
- A3100 PDFDokument2 SeitenA3100 PDFirfanWPKNoch keine Bewertungen
- Ex2100e GE PDFDokument118 SeitenEx2100e GE PDFFerio Arsyad100% (1)
- Excitation GE 2100Dokument21 SeitenExcitation GE 2100KVV100% (2)
- EX2100e Operation Overview: GE Energy Learning CenterDokument30 SeitenEX2100e Operation Overview: GE Energy Learning Centerabdelhamed mahmoudNoch keine Bewertungen
- EX2100 Excitation ControlDokument118 SeitenEX2100 Excitation Controlأبو عبد الرحمن القاضى100% (1)
- Gei 100516Dokument82 SeitenGei 100516Karim BenNoch keine Bewertungen
- GEI-100519 Direct Modbus For Mark VI and EX2100 PDFDokument4 SeitenGEI-100519 Direct Modbus For Mark VI and EX2100 PDFmeirangong100% (1)
- Geh 6407 Control System Solutions (Maintenance and Diagnostics Applications)Dokument79 SeitenGeh 6407 Control System Solutions (Maintenance and Diagnostics Applications)SupolNoch keine Bewertungen
- Troubleshooting Failure To Reach I/O Status A7: GE Power Systems Training and DevelopmentDokument15 SeitenTroubleshooting Failure To Reach I/O Status A7: GE Power Systems Training and DevelopmentIsmail Djeghoubbi100% (1)
- SCOPE-1 SECTION-2 CommssinoingDokument109 SeitenSCOPE-1 SECTION-2 Commssinoingahmed100% (1)
- Sequential Function Chart (SFC) : Application GuideDokument26 SeitenSequential Function Chart (SFC) : Application Guideazizi reNoch keine Bewertungen
- Mark Vies Functional Safety Control Systems Power Distribution Modules (PDM) Application Guide For General MarketDokument31 SeitenMark Vies Functional Safety Control Systems Power Distribution Modules (PDM) Application Guide For General Marketazizi reNoch keine Bewertungen
- Prismic A30Dokument2 SeitenPrismic A30ario2481Noch keine Bewertungen
- Ex2100 Startup GuideDokument88 SeitenEx2100 Startup GuideMADDOX45100% (1)
- GEH-6789-EX2100e Excitation Control Diagnostic Alarms For Thyristor Systems Troubleshooting GuideDokument188 SeitenGEH-6789-EX2100e Excitation Control Diagnostic Alarms For Thyristor Systems Troubleshooting GuideLê Trung Dũng100% (1)
- Excitation Sys & SFCDokument55 SeitenExcitation Sys & SFCABVSAI100% (1)
- HB959202000 (J) A30 Excitation ControllerDokument133 SeitenHB959202000 (J) A30 Excitation ControllerRamakrishna100% (2)
- Starting Gas TurbineDokument3 SeitenStarting Gas Turbineanup_nairNoch keine Bewertungen
- Geh 6676BDokument62 SeitenGeh 6676BAli Ball100% (1)
- Geh 6403 Control System Toolbox For A MK6 Turbine ControllerDokument437 SeitenGeh 6403 Control System Toolbox For A MK6 Turbine ControllerSupol80% (5)
- GEH-6801 - MKV MigrationDokument146 SeitenGEH-6801 - MKV MigrationOmar OmarNoch keine Bewertungen
- Temperature Control at 19MW On MS5001Dokument4 SeitenTemperature Control at 19MW On MS5001chdi100% (1)
- GEH-6721Q Vol IDokument148 SeitenGEH-6721Q Vol IJorge ContrerasNoch keine Bewertungen
- Ger 3658d Speedtronic Mark V Gas Turbine Control System PDFDokument19 SeitenGer 3658d Speedtronic Mark V Gas Turbine Control System PDFyos100% (1)
- Control Box ST Installation and UpgradeDokument75 SeitenControl Box ST Installation and UpgradeKamal Buddy100% (2)
- Presentation Slides - Mark VIEDokument33 SeitenPresentation Slides - Mark VIEolegprikhodko2809Noch keine Bewertungen
- GE Energy: Exciter DC Feedback Board IS200EDCFG1ADokument12 SeitenGE Energy: Exciter DC Feedback Board IS200EDCFG1AFathi YahyaouiNoch keine Bewertungen
- GEH 6700bDokument478 SeitenGEH 6700baurel_c12-1100% (3)
- Limiting The Gas Turbine Load and Operating at Base LoadDokument6 SeitenLimiting The Gas Turbine Load and Operating at Base Loadramkrishna100% (1)
- LCI Starters by GE.Dokument28 SeitenLCI Starters by GE.Suraj KumarNoch keine Bewertungen
- GAC Panel Functions and ConnectionsDokument899 SeitenGAC Panel Functions and ConnectionschudyaceNoch keine Bewertungen
- Ge Mark VieDokument43 SeitenGe Mark VieKevin Ngo100% (1)
- Gea s1301Dokument19 SeitenGea s1301PervimNoch keine Bewertungen
- PRISMIC A12 Excitation ControllerDokument2 SeitenPRISMIC A12 Excitation ControllerJS168Noch keine Bewertungen
- Spesial 1Dokument232 SeitenSpesial 1insanaziz100% (1)
- Basics in Intrumentation in Mark-VDokument11 SeitenBasics in Intrumentation in Mark-VGnanaseharan ArunachalamNoch keine Bewertungen
- Geh-6195g Mark V Application ManualDokument668 SeitenGeh-6195g Mark V Application Manualadrianorex100% (1)
- MCT Mkvie OmDokument4 SeitenMCT Mkvie Omnabil160874Noch keine Bewertungen
- Omron Inverter 3g3xv SelfeederDokument79 SeitenOmron Inverter 3g3xv Selfeedervphongdl100% (1)
- GK100 User Manual A00 0225Dokument125 SeitenGK100 User Manual A00 0225Damian Likay67% (3)
- AC Servo BL Super PQ Serie Type M Instruction ManualDokument350 SeitenAC Servo BL Super PQ Serie Type M Instruction Manualsunhuynh100% (1)
- Powercommand 3100 PDFDokument108 SeitenPowercommand 3100 PDFcarlosmarciosfreitas100% (1)
- FX Series Positioning Beginner S Manual English ControllerDokument116 SeitenFX Series Positioning Beginner S Manual English ControllerdunkhanNoch keine Bewertungen
- Dynamic Braking OptionsDokument28 SeitenDynamic Braking OptionsGersson AChNoch keine Bewertungen
- Scot M3K-MXP PDFDokument2 SeitenScot M3K-MXP PDFKUNALJAYNoch keine Bewertungen
- On Line Energy Conservation System: K.R. Nerkar GM (Electrical)Dokument47 SeitenOn Line Energy Conservation System: K.R. Nerkar GM (Electrical)KUNALJAYNoch keine Bewertungen
- ABB Protection Application HandbookDokument356 SeitenABB Protection Application HandbookSyed Muhammad Munavvar HussainNoch keine Bewertungen
- The Kakas of New ZealandDokument3 SeitenThe Kakas of New ZealandKUNALJAYNoch keine Bewertungen
- Presentation For Monthly PerformanceDokument9 SeitenPresentation For Monthly PerformanceKUNALJAYNoch keine Bewertungen
- HJGFHJFGDokument2 SeitenHJGFHJFGNanang Jaka PerdanaNoch keine Bewertungen
- Vacuum Interrupter Tester: VidarDokument3 SeitenVacuum Interrupter Tester: VidarKUNALJAYNoch keine Bewertungen
- Vacuum Interrupter Tester: VidarDokument3 SeitenVacuum Interrupter Tester: VidarKUNALJAYNoch keine Bewertungen
- Overview Bearing Types PDFDokument9 SeitenOverview Bearing Types PDFKUNALJAYNoch keine Bewertungen
- Electrical Safety - SampleDokument29 SeitenElectrical Safety - SamplesyakirohNoch keine Bewertungen
- WoodwardDokument4 SeitenWoodwardKUNALJAYNoch keine Bewertungen
- Control Accessories Product CatalogDokument56 SeitenControl Accessories Product CatalogKUNALJAYNoch keine Bewertungen
- General Maths InstructionsDokument3 SeitenGeneral Maths InstructionsKUNALJAYNoch keine Bewertungen
- Abb Excitation 1Dokument45 SeitenAbb Excitation 1Erbil KeskinNoch keine Bewertungen
- Motor TestingDokument26 SeitenMotor TestingGas Gas DucatiNoch keine Bewertungen
- 3882 1 SipolCatalogueDokument12 Seiten3882 1 SipolCatalogueAlfonso Núñez SchorrNoch keine Bewertungen
- Ger 3181Dokument10 SeitenGer 3181bpchimeraNoch keine Bewertungen
- VMDokument9 SeitenVMKUNALJAYNoch keine Bewertungen
- HJGFHJFGDokument2 SeitenHJGFHJFGNanang Jaka PerdanaNoch keine Bewertungen
- 400-200 KV Substation DesignDokument62 Seiten400-200 KV Substation DesignMousum91% (22)
- Reactor ProtectionDokument25 SeitenReactor Protectiongkpalepu90% (10)
- Cable Sizing Charts RevADokument8 SeitenCable Sizing Charts RevAKUNALJAYNoch keine Bewertungen
- Sulphur Formula As Per USDokument9 SeitenSulphur Formula As Per USKUNALJAYNoch keine Bewertungen
- Low Volatile Doosan BabcockDokument22 SeitenLow Volatile Doosan BabcockKUNALJAY100% (1)
- Sulphur Formula As Per USDokument9 SeitenSulphur Formula As Per USKUNALJAYNoch keine Bewertungen
- Product Spec Energy Coal South AfricaDokument1 SeiteProduct Spec Energy Coal South Africarabbu14Noch keine Bewertungen
- Advantages of Low Volatile Coals for PCIDokument24 SeitenAdvantages of Low Volatile Coals for PCIKUNALJAYNoch keine Bewertungen
- Coal Dust Explosions in Cement IndustryDokument17 SeitenCoal Dust Explosions in Cement Industrymareymorsy2822Noch keine Bewertungen
- Combustion Characteristics of Low Grade Coal And: Principal Research ResultsDokument2 SeitenCombustion Characteristics of Low Grade Coal And: Principal Research ResultsKUNALJAYNoch keine Bewertungen
- Research BulletsDokument18 SeitenResearch BulletsVong Albios DogomeoNoch keine Bewertungen
- Financial Accounting IIDokument16 SeitenFinancial Accounting IIMiguel BuenoNoch keine Bewertungen
- TRL External CommunicationDokument3 SeitenTRL External CommunicationAyushGargNoch keine Bewertungen
- Applications and Interpretation Standard SpecimensDokument56 SeitenApplications and Interpretation Standard SpecimensNahir ClaraNoch keine Bewertungen
- Department of Computer Engineering Academic Year 2020-21 Class: SE Computer & IT Subject: 22226 PCI (Programming in C) MCQ Unit 1: Program Logic Development MCQ Question Bank With AnswersDokument8 SeitenDepartment of Computer Engineering Academic Year 2020-21 Class: SE Computer & IT Subject: 22226 PCI (Programming in C) MCQ Unit 1: Program Logic Development MCQ Question Bank With AnswersVooovoNoch keine Bewertungen
- AC Assingment 2Dokument3 SeitenAC Assingment 2Levi Deo BatuigasNoch keine Bewertungen
- CHEM F111: General Chemistry II-Semester Lecture 35 (12-04-2019Dokument20 SeitenCHEM F111: General Chemistry II-Semester Lecture 35 (12-04-2019Rachit ShahNoch keine Bewertungen
- General Physics1 Q2 W8 Module8 ThermodynamicsDokument23 SeitenGeneral Physics1 Q2 W8 Module8 ThermodynamicsRegine Ann ViloriaNoch keine Bewertungen
- T24 IN2 RoutinesDokument29 SeitenT24 IN2 RoutinesKhalil ArifiNoch keine Bewertungen
- QAP - LT Panel PDFDokument8 SeitenQAP - LT Panel PDFAkshay Ajay100% (2)
- WCS1400 / WCS1400S: FeaturesDokument7 SeitenWCS1400 / WCS1400S: FeaturesbahrowiadiNoch keine Bewertungen
- 006 PVC & CPVC Schedule 80 Fittings, Unions Tank Adapters, Expansion Joints & Saddles PDFDokument92 Seiten006 PVC & CPVC Schedule 80 Fittings, Unions Tank Adapters, Expansion Joints & Saddles PDFnicacio_89507470Noch keine Bewertungen
- Structural Steel Design: Design of Tension Members 2: Universal College of ParañaqueDokument36 SeitenStructural Steel Design: Design of Tension Members 2: Universal College of ParañaqueFritz LuzonNoch keine Bewertungen
- L - 1 - INTRO - Well LoggingDokument47 SeitenL - 1 - INTRO - Well LoggingSaaeed Ali100% (1)
- Accelerate your career with online coursesDokument22 SeitenAccelerate your career with online coursesAYEDITAN AYOMIDENoch keine Bewertungen
- Chapter 2Dokument2 SeitenChapter 2LolmasterNoch keine Bewertungen
- Nov. AbwDokument50 SeitenNov. Abwjbyarkpawolo70Noch keine Bewertungen
- Effect of Temperature on Chemical ReactionDokument8 SeitenEffect of Temperature on Chemical ReactionnajihahNoch keine Bewertungen
- Guide For Scavenge InspectionDokument36 SeitenGuide For Scavenge InspectionNeelakantan SankaranarayananNoch keine Bewertungen
- SamplingDokument12 SeitenSamplingΔημητρηςΣαρακυρουNoch keine Bewertungen
- Matriculation Chemistry Introduction To Organic Compound Part 1 PDFDokument24 SeitenMatriculation Chemistry Introduction To Organic Compound Part 1 PDFiki292Noch keine Bewertungen
- Catchment YieldDokument7 SeitenCatchment YieldBernard PalmerNoch keine Bewertungen
- Calentador Catalitico de TuberíasDokument2 SeitenCalentador Catalitico de TuberíasDavid RomeroNoch keine Bewertungen
- Barrels & Actions by Harold HoffmanDokument238 SeitenBarrels & Actions by Harold HoffmanNorm71% (7)
- Ofc SyllabusDokument7 SeitenOfc SyllabusARDHRA BNoch keine Bewertungen
- Is 14416 1996Dokument20 SeitenIs 14416 1996kaustavNoch keine Bewertungen
- Etap Help PDFDokument2 SeitenEtap Help PDFRebeccaNoch keine Bewertungen
- 384 TungaloyDokument32 Seiten384 Tungaloyp.designNoch keine Bewertungen
- Product Catalogue Chemical IndicatorsDokument28 SeitenProduct Catalogue Chemical IndicatorsscribdddcNoch keine Bewertungen
- MATLAB ApplicationsDokument252 SeitenMATLAB Applicationsmadhuri nimseNoch keine Bewertungen