Das könnte Ihnen auch gefallen
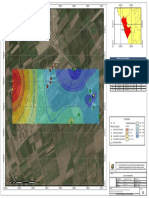
- Mapa de HidroisohipsaDokument1 SeiteMapa de HidroisohipsaRuth Alarcon MezaNoch keine Bewertungen
- Microcurriculo de BioéticaDokument10 SeitenMicrocurriculo de Bioéticadavid morenoNoch keine Bewertungen
- Valoracion de Los Tejidos Blandos FacialesDokument47 SeitenValoracion de Los Tejidos Blandos FacialesJohana Angelica Palomino RodasNoch keine Bewertungen
- Modulo 1 El Coaching Su Historia y Conceptos Fundamentales PublicarDokument7 SeitenModulo 1 El Coaching Su Historia y Conceptos Fundamentales PublicarNera Gonzalez RamirezNoch keine Bewertungen
- DURKHEIM Explicacion ReligionDokument7 SeitenDURKHEIM Explicacion Religionnaturalezamuerta100% (1)
- Los Destinos Turísticos Inteligentes TFG 2019 Rosa Vives BeatrizDokument49 SeitenLos Destinos Turísticos Inteligentes TFG 2019 Rosa Vives BeatrizChristian Salgado EspinosaNoch keine Bewertungen
- Direccion EstrategicaDokument3 SeitenDireccion EstrategicaJessy CampoNoch keine Bewertungen
- Ficha Seres Vivos para Cuarto de PrimariaDokument3 SeitenFicha Seres Vivos para Cuarto de Primariajuan pablo bedolla ayazoNoch keine Bewertungen
- Conexiones EstructuralesDokument22 SeitenConexiones EstructuralesMartha Beatriz Martinez LozaNoch keine Bewertungen
- Programa Introduccion Astronomia PDFDokument11 SeitenPrograma Introduccion Astronomia PDFAxel Izaguirre MejiaNoch keine Bewertungen
- Ejemplo de Reporte de Estudio TecnicoDokument11 SeitenEjemplo de Reporte de Estudio TecnicoSpacing RugNoch keine Bewertungen
- Tema 12.mercado LaboralDokument17 SeitenTema 12.mercado LaboralBEATRIZ HUAMANNoch keine Bewertungen
- ACTIVIDAD 2 (Aprendizaje Autonomo)Dokument7 SeitenACTIVIDAD 2 (Aprendizaje Autonomo)daneys308572100% (3)
- Mapa Conceptual, Estrategias y Modalidades de Intervencion PsicoeducativaDokument4 SeitenMapa Conceptual, Estrategias y Modalidades de Intervencion PsicoeducativaOyola CarlosNoch keine Bewertungen
- La Etica Profesional y La Credibilidad en Los Informes de Auditoria Financiera Del Contador Público en El Ejercicio ProfesionalDokument31 SeitenLa Etica Profesional y La Credibilidad en Los Informes de Auditoria Financiera Del Contador Público en El Ejercicio Profesionalcatalina50% (2)
- Pendulo SimpleDokument6 SeitenPendulo SimpleFranklin MauricioNoch keine Bewertungen
- Estudio de Impacto AmbientalDokument52 SeitenEstudio de Impacto AmbientalJuan Pablo La TorreNoch keine Bewertungen
- Tarot Telefonico Economico UrsulaDokument3 SeitenTarot Telefonico Economico UrsulaLaura tarotNoch keine Bewertungen
- Estabilizacion de Taludes Con PilotesDokument8 SeitenEstabilizacion de Taludes Con Pilotesmariahenke100% (1)
- Esquejes de Ruda PDFDokument3 SeitenEsquejes de Ruda PDFztichoNoch keine Bewertungen
- Sesion de Aprendizaje - La Musica - Concepto-Elementos e ImportanciaDokument4 SeitenSesion de Aprendizaje - La Musica - Concepto-Elementos e ImportanciaReynaDarling100% (4)
- Red de Contenidos Historia 3° BasicoDokument3 SeitenRed de Contenidos Historia 3° BasicoVerónica Vásquez BustosNoch keine Bewertungen
- 02 ProbabilidadDokument4 Seiten02 Probabilidadfernanda13Noch keine Bewertungen
- Derecho Al Nombre CivilDokument19 SeitenDerecho Al Nombre CivilDaniel Fernández Pérez Vargas100% (1)
- Resuelto de Metodo SimplexDokument10 SeitenResuelto de Metodo SimplexRafael Antonio Cortina RodriguezNoch keine Bewertungen
- Taller CifDokument2 SeitenTaller CifVictor BautistaNoch keine Bewertungen
- NT1 Comunicación UNIDAD 3 PLANIFICACIÓN JUGANDO CON LA VOCAL IDokument15 SeitenNT1 Comunicación UNIDAD 3 PLANIFICACIÓN JUGANDO CON LA VOCAL IMaria Diza Pino VargasNoch keine Bewertungen
- Ensayo Teoría Del Conocimiento IBDokument2 SeitenEnsayo Teoría Del Conocimiento IBArnau Mas DorcaNoch keine Bewertungen
- Conceptos Básicos (La Eco. y Sus Cien. Afines)Dokument58 SeitenConceptos Básicos (La Eco. y Sus Cien. Afines)sindy_castro_17Noch keine Bewertungen
- Capitulo 9 Cementacion LinerDokument47 SeitenCapitulo 9 Cementacion Linerrose7_17_985111481Noch keine Bewertungen