Das könnte Ihnen auch gefallen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
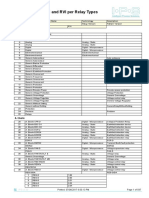
- IPS-ENERGY - Available Relay ModelsDokument597 SeitenIPS-ENERGY - Available Relay Modelsbrahim100% (2)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- Allison - CEC2 Trouble ShootingDokument243 SeitenAllison - CEC2 Trouble ShootingJacques Van Niekerk67% (3)
- Cutting Plotter FC8600-60/75/100/130/160: Service ManualDokument152 SeitenCutting Plotter FC8600-60/75/100/130/160: Service ManualOtavio MirandaNoch keine Bewertungen
- Digital Communication Theory: SolutionDokument2 SeitenDigital Communication Theory: SolutionNishanth ShanmugamNoch keine Bewertungen
- New Text DocumentDokument1 SeiteNew Text DocumentNishanth ShanmugamNoch keine Bewertungen
- TMS320C67x Reference GuideDokument465 SeitenTMS320C67x Reference Guideclenx0% (1)
- Bank ProjectDokument1 SeiteBank ProjectNishanth ShanmugamNoch keine Bewertungen
- Report FinalDokument19 SeitenReport FinalNishanth ShanmugamNoch keine Bewertungen
- ReadmeDokument1 SeiteReadmeNishanth ShanmugamNoch keine Bewertungen
- Timetable FormatDokument1 SeiteTimetable FormatNishanth ShanmugamNoch keine Bewertungen
- Cs Downed CZDokument1 SeiteCs Downed CZfahmyitsNoch keine Bewertungen
- CEHv6 Module 13 Hacking Email AccountsDokument48 SeitenCEHv6 Module 13 Hacking Email AccountsNishanth ShanmugamNoch keine Bewertungen
- Report FinalDokument20 SeitenReport FinalNishanth ShanmugamNoch keine Bewertungen
- Android App For Student Intimation SynopsisDokument35 SeitenAndroid App For Student Intimation SynopsisNatheem SafinNoch keine Bewertungen
- 2 RRU DBS and BTS Introduction and Hardware Installation PDFDokument74 Seiten2 RRU DBS and BTS Introduction and Hardware Installation PDFikhlas boutayebNoch keine Bewertungen
- Install Computer SystemsDokument43 SeitenInstall Computer Systemsashley bendanaNoch keine Bewertungen
- Dewalt Table Saw Dw745Dokument52 SeitenDewalt Table Saw Dw745Pablo DNoch keine Bewertungen
- Epson Stylus TX121Dokument2 SeitenEpson Stylus TX121manmca1986Noch keine Bewertungen
- CellVine Repeater 50W - PCS1900Dokument2 SeitenCellVine Repeater 50W - PCS1900Danny SassinNoch keine Bewertungen
- Monitoring LDOMSDokument49 SeitenMonitoring LDOMSAhmed EidNoch keine Bewertungen
- ZP BankDokument17 SeitenZP BanksharkNoch keine Bewertungen
- Wmic Command ListDokument31 SeitenWmic Command ListjoseanNoch keine Bewertungen
- Test SolutionDokument3 SeitenTest SolutionAsif MalikNoch keine Bewertungen
- 1 - Format of Six Weeks Training ReportDokument5 Seiten1 - Format of Six Weeks Training ReportDeepak MehtaNoch keine Bewertungen
- NetworkingDokument20 SeitenNetworkingAnitha JebarajNoch keine Bewertungen
- 4 DosDokument81 Seiten4 DosaerhaehNoch keine Bewertungen
- SELinux For DummiesDokument38 SeitenSELinux For DummiesdbahanyNoch keine Bewertungen
- PARKING40Dokument11 SeitenPARKING40Roshan ShanmughanNoch keine Bewertungen
- ARM CORTEX - M & OMAP ProcessorsDokument34 SeitenARM CORTEX - M & OMAP ProcessorsMaruthi Rao100% (1)
- Libratherm 32-Channel Temperature ScannerDokument3 SeitenLibratherm 32-Channel Temperature ScannerYogesh GowdaNoch keine Bewertungen
- VNX P Add A Disk 120Dokument14 SeitenVNX P Add A Disk 120KNoch keine Bewertungen
- 3101 Workbook Version2Dokument0 Seiten3101 Workbook Version2plume23Noch keine Bewertungen
- Jcy1700 SeDokument98 SeitenJcy1700 SeMarx QuebralNoch keine Bewertungen
- Unit 4 Micro Controller 8051Dokument20 SeitenUnit 4 Micro Controller 8051Anbalagan Guru100% (1)
- 783 y AdaptorDokument1 Seite783 y AdaptorDavide GuerreiroNoch keine Bewertungen
- Bargaining Power of SuppliersDokument2 SeitenBargaining Power of SuppliersmkolapoNoch keine Bewertungen
- Monica AN24 Vs BrochureDokument4 SeitenMonica AN24 Vs Brochurehablando0% (1)
- Cisco Lab OSPF EncapsulationDokument23 SeitenCisco Lab OSPF EncapsulationMike OwlyNoch keine Bewertungen
- Junos Node Slicing PDFDokument154 SeitenJunos Node Slicing PDFAshish NamdeoNoch keine Bewertungen
- MainDokument33 SeitenMainabdulgani11Noch keine Bewertungen