Das könnte Ihnen auch gefallen
- TD DDS 03 - 2012 PDFDokument1 SeiteTD DDS 03 - 2012 PDFSoufiane ArquímedesNoch keine Bewertungen
- TD 05Dokument1 SeiteTD 05Khelif HichemNoch keine Bewertungen
- Chapitre II - SNL - Plan de PhaseDokument68 SeitenChapitre II - SNL - Plan de PhaseThinhinane KaguyaNoch keine Bewertungen
- Slides2 SNL 2019Dokument68 SeitenSlides2 SNL 2019Ayoub LaouinateNoch keine Bewertungen
- Projet 6 Pondule InverséDokument23 SeitenProjet 6 Pondule InverséTECH NEWSNoch keine Bewertungen
- TP 2Dokument4 SeitenTP 2Groupe automatique 2Noch keine Bewertungen
- Exercice SDokument4 SeitenExercice SHichem Bah100% (2)
- Rappels de Maths TDDokument3 SeitenRappels de Maths TDMohamed BenziadaNoch keine Bewertungen
- Merged 20200620 161258Dokument7 SeitenMerged 20200620 161258Anas DoukaniNoch keine Bewertungen
- TP RDM 2 FinaliserDokument22 SeitenTP RDM 2 FinaliserMalek Ikram CHERAITNoch keine Bewertungen
- TD Chapitre 3 Modifier CinématiqueDokument1 SeiteTD Chapitre 3 Modifier Cinématiqueali18abidNoch keine Bewertungen
- TD-Automatique II - INGE2-2020-2021Dokument3 SeitenTD-Automatique II - INGE2-2020-2021Christopher AMENOUGNONNoch keine Bewertungen
- Exii 1Dokument4 SeitenExii 1LOGG5Noch keine Bewertungen
- TD1 CNLDokument2 SeitenTD1 CNLnacerNoch keine Bewertungen
- Poly TDDokument64 SeitenPoly TDBOBE2007069100% (2)
- TP1 AutomatiqueDokument14 SeitenTP1 AutomatiqueRamzi AyadiNoch keine Bewertungen
- Serie TD2Dokument2 SeitenSerie TD2Nour MmrNoch keine Bewertungen
- Analyse Matricielle Appliquée Aux Structures - Méthode Des Éléments FinisDokument24 SeitenAnalyse Matricielle Appliquée Aux Structures - Méthode Des Éléments FinisJoël Mètogbé ZinsaloNoch keine Bewertungen
- Série N°3 - 2023Dokument5 SeitenSérie N°3 - 2023Mohamed SawabNoch keine Bewertungen
- Efs 1 2020Dokument1 SeiteEfs 1 2020mou tiemNoch keine Bewertungen
- Fonction Exponentielle Première ExercicesDokument6 SeitenFonction Exponentielle Première ExercicesQ L M0% (1)
- CC1 2017 - 2018Dokument11 SeitenCC1 2017 - 2018dhdhNoch keine Bewertungen
- Notions de CinématiqueDokument1 SeiteNotions de CinématiqueAdama DembeNoch keine Bewertungen
- l3 Dyn Examen 2020-1Dokument5 Seitenl3 Dyn Examen 2020-1Henry PNoch keine Bewertungen
- TD2 Etude Temporelle Et Fréquentielle Des Système AsservisDokument5 SeitenTD2 Etude Temporelle Et Fréquentielle Des Système AsserviskpatchclientsNoch keine Bewertungen
- TD-4 - Cinématique Des Solides Et Des SystèmesDokument3 SeitenTD-4 - Cinématique Des Solides Et Des Systèmesjaberhouda29Noch keine Bewertungen
- TP1 MSysDDokument19 SeitenTP1 MSysDmighty eagle 99Noch keine Bewertungen
- TD 33 Corrigé - Systèmes Séquentiels - Fonction MémoireDokument2 SeitenTD 33 Corrigé - Systèmes Séquentiels - Fonction Mémoirebhs channelNoch keine Bewertungen
- Analyse3 Notes de Cours DouiriDokument44 SeitenAnalyse3 Notes de Cours DouiriKind HeartedNoch keine Bewertungen
- TD de PhysiqueDokument2 SeitenTD de PhysiqueAguissa TouréNoch keine Bewertungen
- Travaux DirigesDokument10 SeitenTravaux Dirigesbbhscribd100% (1)
- TP Auto MEEA 04 05 PDFDokument88 SeitenTP Auto MEEA 04 05 PDFYassine RabhiNoch keine Bewertungen
- Td1 M1cde M1eltind Model Identif 2020Dokument2 SeitenTd1 M1cde M1eltind Model Identif 2020saidNoch keine Bewertungen
- Td1 M1cde M1eltind Model Identif 2020Dokument2 SeitenTd1 M1cde M1eltind Model Identif 2020saidNoch keine Bewertungen
- Solution Fiche 1Dokument5 SeitenSolution Fiche 1mehdi benounaNoch keine Bewertungen
- Cinématique: Exercice 1Dokument2 SeitenCinématique: Exercice 1Maman SuperbeNoch keine Bewertungen
- TD SNLDokument1 SeiteTD SNLChemkhi Mohamed AliNoch keine Bewertungen
- Test 1 OV Métallurgie 2020-2021 + CorrigéDokument3 SeitenTest 1 OV Métallurgie 2020-2021 + CorrigéFifi La MarionnetteNoch keine Bewertungen
- 01CINEMATIQUEDokument5 Seiten01CINEMATIQUETamaru Diallo100% (1)
- 04 CinematiqueDokument9 Seiten04 CinematiqueDhia 006Noch keine Bewertungen
- Fiche TD 1 Onde Et Vibrations A.H. ZAHMANI 2022-2023Dokument2 SeitenFiche TD 1 Onde Et Vibrations A.H. ZAHMANI 2022-2023jalilNoch keine Bewertungen
- Examen Janv 2007 Efdynamique m2Dokument20 SeitenExamen Janv 2007 Efdynamique m2Anonymous 80p9OVNoch keine Bewertungen
- Ex Ef Matrice Raideur PoutreDokument3 SeitenEx Ef Matrice Raideur Poutreipman99Noch keine Bewertungen
- 08 Ctrle 25 02 2013 Integration Correction PDFDokument3 Seiten08 Ctrle 25 02 2013 Integration Correction PDFMourad MouradbensalemNoch keine Bewertungen
- Devoir TSDokument1 SeiteDevoir TSTÉCHNO CHANEL100% (1)
- Maths TD09 DérivéesDokument8 SeitenMaths TD09 DérivéesMaxime PeridyNoch keine Bewertungen
- Reg Td2 Parie1Dokument1 SeiteReg Td2 Parie1RAZIQ YOUSSEFNoch keine Bewertungen
- REG TD2 Parie1Dokument1 SeiteREG TD2 Parie1BanéNoch keine Bewertungen
- TD Seance 1Dokument1 SeiteTD Seance 1Yahya MoumeneNoch keine Bewertungen
- M1 TD2 DDSDokument2 SeitenM1 TD2 DDSRaid AbdemezianeNoch keine Bewertungen
- Examen de Physique 3 LMD ST Duree 1h 30Dokument22 SeitenExamen de Physique 3 LMD ST Duree 1h 30jemaiNoch keine Bewertungen
- CollègeABBertoua Physique TleC BaccBlanc2 2021Dokument5 SeitenCollègeABBertoua Physique TleC BaccBlanc2 2021hitmanNoch keine Bewertungen
- Interro TRM M1 6 Décembre2015Dokument4 SeitenInterro TRM M1 6 Décembre2015Chakib ChNoch keine Bewertungen
- Analyse Mathématique pour l'ingénieur: Analyse Mathématique pour l'ingénieur, #2Von EverandAnalyse Mathématique pour l'ingénieur: Analyse Mathématique pour l'ingénieur, #2Noch keine Bewertungen
- Annales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésVon EverandAnnales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésBewertung: 4.5 von 5 Sternen4.5/5 (4)
- Exercices d'intégrales de lignes, de surfaces et de volumesVon EverandExercices d'intégrales de lignes, de surfaces et de volumesNoch keine Bewertungen
- Brauchures Des TP Entrainnement ElectriquesDokument12 SeitenBrauchures Des TP Entrainnement Electriquesali18abidNoch keine Bewertungen
- TP N 4Dokument7 SeitenTP N 4ali18abidNoch keine Bewertungen
- TP2logique SomfyDokument6 SeitenTP2logique Somfyali18abidNoch keine Bewertungen
- Texte Complet LyonDokument250 SeitenTexte Complet Lyonali18abidNoch keine Bewertungen
- TD IdentifDokument6 SeitenTD Identifali18abid100% (1)
- EvansDokument1 SeiteEvansali18abidNoch keine Bewertungen
- Solution TP AsservissementDokument9 SeitenSolution TP Asservissementali18abid86% (7)
- TD 01Dokument2 SeitenTD 01ali18abidNoch keine Bewertungen
- TD Chapitre 3 Modifier CinématiqueDokument1 SeiteTD Chapitre 3 Modifier Cinématiqueali18abidNoch keine Bewertungen
- Chapitre 2 Géométrique ModifierDokument28 SeitenChapitre 2 Géométrique Modifierali18abid100% (1)
- TD 01Dokument2 SeitenTD 01ali18abidNoch keine Bewertungen
- Aquaculture (Alimentation)Dokument48 SeitenAquaculture (Alimentation)Tioté Daouda DavidNoch keine Bewertungen
- Teachers Manual FRDokument113 SeitenTeachers Manual FRAli Safia BaldeNoch keine Bewertungen
- Kadio Hilaire NIAMKEDokument14 SeitenKadio Hilaire NIAMKEBrou Guillaume KOUASSINoch keine Bewertungen
- Microbio La Methanisation Et La SulfurisationDokument60 SeitenMicrobio La Methanisation Et La SulfurisationRayène Bekir100% (1)
- LA RÉPLICATION DE L'ADN - SVT 1èreDokument3 SeitenLA RÉPLICATION DE L'ADN - SVT 1èreSong GabiNoch keine Bewertungen
- INCENDIEDokument7 SeitenINCENDIEbnederNoch keine Bewertungen
- Maitrise Des DocumentsDokument30 SeitenMaitrise Des DocumentsKhalil AtigNoch keine Bewertungen
- Auteurs Et Theories-Management BTSDokument20 SeitenAuteurs Et Theories-Management BTSKing LaracheNoch keine Bewertungen
- Pe Le BonheurDokument3 SeitenPe Le Bonheurdalihajar20Noch keine Bewertungen
- Bergerac - SDIS - 2023-02-28-ST01 - Ind.0 ImplantationDokument1 SeiteBergerac - SDIS - 2023-02-28-ST01 - Ind.0 Implantationlouis.jailletNoch keine Bewertungen
- 2019 Actu 25 11 Coworking AVDokument4 Seiten2019 Actu 25 11 Coworking AVRawdhaRaoudhaNoch keine Bewertungen
- Chap 06 ChargementDokument16 SeitenChap 06 ChargementSõlã Khed100% (2)
- EF-Tableau de Bord Commercial CCI Narbonne 1Dokument40 SeitenEF-Tableau de Bord Commercial CCI Narbonne 1Salma Faris100% (2)
- Etude de Dangers MORCHAIN RNT 19112014Dokument32 SeitenEtude de Dangers MORCHAIN RNT 19112014belakroumNoch keine Bewertungen
- Cours Electronique Puissance PDFDokument147 SeitenCours Electronique Puissance PDFAlix BoubanNoch keine Bewertungen
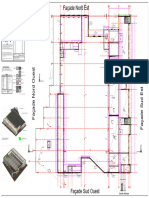
- Dossier Permis de ConstruireDokument11 SeitenDossier Permis de ConstruireDavid GuillemoteauNoch keine Bewertungen
- 3e VraiDokument112 Seiten3e Vraiadresses communalesNoch keine Bewertungen
- Gouvernance D'entrepriseDokument1 SeiteGouvernance D'entrepriseYassine BoukriNoch keine Bewertungen
- Transport Par ConvoyeurDokument14 SeitenTransport Par ConvoyeurAliNoch keine Bewertungen
- Bambara 24 06 A4Dokument4 SeitenBambara 24 06 A4alassane souaréNoch keine Bewertungen
- Exposé Laboratoire MédicaleDokument21 SeitenExposé Laboratoire MédicaleRiadh BenassiNoch keine Bewertungen
- Fabrication Du FromageDokument4 SeitenFabrication Du FromageDounia Ben100% (1)
- Progression ColoriageDokument55 SeitenProgression ColoriageVanessa Segers BoulayNoch keine Bewertungen
- Dossier Théâtre Sans Animaux - Le PalindromeDokument7 SeitenDossier Théâtre Sans Animaux - Le PalindromeLe Palindrome100% (3)
- CV Amine LahianiDokument2 SeitenCV Amine LahianiAmine Lahiani100% (1)
- Les Calculs de La Concentration en PPM (Parties Par Million) - AlloprofDokument5 SeitenLes Calculs de La Concentration en PPM (Parties Par Million) - AlloprofAmina Malek AyaNoch keine Bewertungen
- Physique: Exercice 1Dokument3 SeitenPhysique: Exercice 1Lahcen ElamraouiNoch keine Bewertungen
- How To Convert MPPS V13 To MPPS V16 V18Dokument5 SeitenHow To Convert MPPS V13 To MPPS V16 V18Sofiane ZemmouriNoch keine Bewertungen
- BibliographieDokument3 SeitenBibliographieRofaida SamiNoch keine Bewertungen
- Lettre de Motivation EmploiDokument1 SeiteLettre de Motivation EmploiSoren AabyeNoch keine Bewertungen