Das könnte Ihnen auch gefallen
- Parallel Computational Fluid Dynamics '99: Towards Teraflops, Optimization and Novel FormulationsVon EverandParallel Computational Fluid Dynamics '99: Towards Teraflops, Optimization and Novel FormulationsNoch keine Bewertungen
- Ch-1 Industrial MAchines and MechanicsDokument26 SeitenCh-1 Industrial MAchines and MechanicsQasim Ali0% (1)
- Blade Profile Optimization of Kaplan Turbine Using CFD AnalysisDokument16 SeitenBlade Profile Optimization of Kaplan Turbine Using CFD Analysiscbaraj100% (1)
- In a refrigeration plant, a section of pipe carrying the refrigerant vibrated suddenly at a compressor speed of 230 rpmDokument14 SeitenIn a refrigeration plant, a section of pipe carrying the refrigerant vibrated suddenly at a compressor speed of 230 rpmHari Narayanan100% (1)
- Circulation of Water Inside Boiler TubesDokument14 SeitenCirculation of Water Inside Boiler Tubesمصطفى أحمد عبد الرزاق هاديNoch keine Bewertungen
- ABRASIVE MACHINING PROCESSESDokument13 SeitenABRASIVE MACHINING PROCESSESAbdulRehman Ahmed SoomroNoch keine Bewertungen
- Mechanical Workshop ReportDokument4 SeitenMechanical Workshop ReportHumaid Al-'AmrieNoch keine Bewertungen
- Mechanics of Machines TutDokument11 SeitenMechanics of Machines TutAnonymous TG3lMENoch keine Bewertungen
- 2013Dokument31 Seiten2013Narayanan SrinivasanNoch keine Bewertungen
- Asic Mechanical Engineering: Unit-1 Part-1 ThermodynamicsDokument99 SeitenAsic Mechanical Engineering: Unit-1 Part-1 ThermodynamicsSanjiv ParabNoch keine Bewertungen
- Static and Dynamic Analysis of Suspension SystemDokument6 SeitenStatic and Dynamic Analysis of Suspension SystemTrbvmNoch keine Bewertungen
- Stresses and Strains (Part 1)Dokument44 SeitenStresses and Strains (Part 1)AMIE Study Circle, RoorkeeNoch keine Bewertungen
- Merkezkaç Pompa Tasarımı - Temel BoyutlandırmaDokument9 SeitenMerkezkaç Pompa Tasarımı - Temel BoyutlandırmaSerdarNoch keine Bewertungen
- Understanding Servo Motors and Their ApplicationsDokument14 SeitenUnderstanding Servo Motors and Their ApplicationselecenggNoch keine Bewertungen
- Fabrication of Bevel Gear Drive Screw Jack for Automobile GaragesDokument5 SeitenFabrication of Bevel Gear Drive Screw Jack for Automobile GaragesANAND KRISHNAN100% (1)
- Introduction To Turbomachinery Final Exam 1SY 2016-2017Dokument1 SeiteIntroduction To Turbomachinery Final Exam 1SY 2016-2017Paul RodgersNoch keine Bewertungen
- Mechanics of Machines BasicsDokument15 SeitenMechanics of Machines Basicsnauman khanNoch keine Bewertungen
- Exergy Analysis of Rankine Cycle & STPPDokument18 SeitenExergy Analysis of Rankine Cycle & STPPNouman KhalidNoch keine Bewertungen
- Me TrologyDokument69 SeitenMe TrologyprabhjotbhangalNoch keine Bewertungen
- Scissor Jack DesignDokument66 SeitenScissor Jack DesignTewodros DereseNoch keine Bewertungen
- Numericals On Centrifugal and Axial CompressorsDokument2 SeitenNumericals On Centrifugal and Axial CompressorsMoiz Tinwala33% (3)
- MEG373 CHP05 Forces ProblemsDokument4 SeitenMEG373 CHP05 Forces ProblemsDavorinBazijanacNoch keine Bewertungen
- Thermodynamic analysis of air standard cycle of Hyundai I 20 engineDokument14 SeitenThermodynamic analysis of air standard cycle of Hyundai I 20 engineParbat Shrestha100% (1)
- Power Plant EngDokument93 SeitenPower Plant Engsenthilkumarece100% (1)
- Basic Principles of Turbo MachinesDokument6 SeitenBasic Principles of Turbo Machinesbinho58100% (1)
- Gas Turbine Thermal Power PlantDokument7 SeitenGas Turbine Thermal Power PlantAkshay ManzaNoch keine Bewertungen
- Lecture Note - Steam CycleDokument37 SeitenLecture Note - Steam CycleSuchi Suchi SuchiNoch keine Bewertungen
- Air Conditioning System ExperimentDokument3 SeitenAir Conditioning System ExperimentBoJassim100% (1)
- E-644 - Electrical Codes and StandardsDokument8 SeitenE-644 - Electrical Codes and StandardsLAYTHMUNAFNoch keine Bewertungen
- C-D Nozzle PDFDokument38 SeitenC-D Nozzle PDFAnonymous VKv75qe98Noch keine Bewertungen
- Heat Transfer Heat Ex Changers PDFDokument116 SeitenHeat Transfer Heat Ex Changers PDFAndresNoch keine Bewertungen
- 01 Kernsmethod 150909121926 Lva1 App6892 PDFDokument45 Seiten01 Kernsmethod 150909121926 Lva1 App6892 PDFPenjual AirNoch keine Bewertungen
- Power Plant Engineering by S K Mondal PDFDokument109 SeitenPower Plant Engineering by S K Mondal PDFwiki.iiestNoch keine Bewertungen
- I.C.E Assig.Dokument3 SeitenI.C.E Assig.sherifkazem20100% (1)
- Turbulent Flow in An Intake-Manifold PDFDokument6 SeitenTurbulent Flow in An Intake-Manifold PDFzoragiNoch keine Bewertungen
- R.M.K Engineering College: Me8712-Technical SeminarDokument15 SeitenR.M.K Engineering College: Me8712-Technical SeminarPraveenNoch keine Bewertungen
- Chap 5 ThermodynamicsDokument24 SeitenChap 5 ThermodynamicsAsmawi Mohd KhailaniNoch keine Bewertungen
- Fluid Flow: A First Course in Fluid Mechanics (4th Edition)Dokument5 SeitenFluid Flow: A First Course in Fluid Mechanics (4th Edition)ra4499354150% (2)
- (G. Boxer) Applications of EngineeringDokument183 Seiten(G. Boxer) Applications of EngineeringAnonymous rFIshYyNoch keine Bewertungen
- Pneumatic Rod Bending Machine Project ReportDokument3 SeitenPneumatic Rod Bending Machine Project ReportJeyakumar NNoch keine Bewertungen
- Power Cycle, Oil, Coal and Natural Gas Introduction To The Rankine Steam Cycle and Carnot EfficiencyDokument69 SeitenPower Cycle, Oil, Coal and Natural Gas Introduction To The Rankine Steam Cycle and Carnot EfficiencyLenin PaudelNoch keine Bewertungen
- Rankine CycleDokument17 SeitenRankine CycleM.ThirunavukkarasuNoch keine Bewertungen
- Analysis of Torsion BarsDokument30 SeitenAnalysis of Torsion BarsVarun Raj0% (1)
- RAC Assignments 24062016 091508AMDokument37 SeitenRAC Assignments 24062016 091508AMsakalidhasavasanNoch keine Bewertungen
- Starting Up The Power Station SimulatorDokument7 SeitenStarting Up The Power Station SimulatoraajilNoch keine Bewertungen
- Design of Power Screws: Torque, Stress CalculationsDokument15 SeitenDesign of Power Screws: Torque, Stress CalculationsVenkatesh GangadharNoch keine Bewertungen
- Grid Fins 2Dokument3 SeitenGrid Fins 2aerospacian704Noch keine Bewertungen
- Lab 3Dokument7 SeitenLab 3jisteeleNoch keine Bewertungen
- Piston PumpDokument7 SeitenPiston Pumpmohanadymt100% (1)
- Static and Dynamic Balancing: Experiment#2Dokument4 SeitenStatic and Dynamic Balancing: Experiment#2Maqbool Khan100% (1)
- Machines and Mechanisms - 2022Dokument164 SeitenMachines and Mechanisms - 2022Ha LinhNoch keine Bewertungen
- Classical Kinematis CHP 1-14Dokument95 SeitenClassical Kinematis CHP 1-14kullayot suwantarojNoch keine Bewertungen
- Machine Components - pptx1Dokument272 SeitenMachine Components - pptx1Almajd MustafaNoch keine Bewertungen
- Chapter 1-IntroductionDokument34 SeitenChapter 1-IntroductionMaitumeloNoch keine Bewertungen
- MomDokument33 SeitenMomEileen WongNoch keine Bewertungen
- W1 Introduction To Mechanisms and Kinematics 20140724Dokument38 SeitenW1 Introduction To Mechanisms and Kinematics 20140724Izzat MalikNoch keine Bewertungen
- Mechanics of Machines: Azman ZainuddinDokument30 SeitenMechanics of Machines: Azman ZainuddinJimmy Teow100% (1)
- 00 - 14 - HO - Power Train NVH TopicsDokument40 Seiten00 - 14 - HO - Power Train NVH TopicsDaniel WangNoch keine Bewertungen
- Design of Steering Gear System in Passenger Car: A Review: February 2018Dokument8 SeitenDesign of Steering Gear System in Passenger Car: A Review: February 2018Turra GusainNoch keine Bewertungen
- Mechanical MetallurgyDokument46 SeitenMechanical MetallurgykumarNoch keine Bewertungen
- ELK 371E Week IV - 11.10.22Dokument28 SeitenELK 371E Week IV - 11.10.22Mehmet Onur UlusoyNoch keine Bewertungen
- Ultra Low Freezer (Tower) ManualDokument53 SeitenUltra Low Freezer (Tower) Manualadnan_hashmi786100% (1)
- Astm D4317 98Dokument3 SeitenAstm D4317 98Abril CampuzanoNoch keine Bewertungen
- Einstein's Genealogy.Dokument6 SeitenEinstein's Genealogy.lennysanchezNoch keine Bewertungen
- 731 Loss On Drying: Water Determination 921Dokument1 Seite731 Loss On Drying: Water Determination 921wilNoch keine Bewertungen
- Fischerscope X-Ray Xan 220Dokument4 SeitenFischerscope X-Ray Xan 220varun sachdevaNoch keine Bewertungen
- Answer Key Chapter 8Dokument4 SeitenAnswer Key Chapter 8linNoch keine Bewertungen
- Nust ChemistryDokument137 SeitenNust Chemistryahmed ilyasNoch keine Bewertungen
- Siemens 3ru21464kb0Dokument5 SeitenSiemens 3ru21464kb0Hema HemaNoch keine Bewertungen
- 1.4 Free FallDokument7 Seiten1.4 Free FallLogine ZorombaNoch keine Bewertungen
- En 12101-3Dokument104 SeitenEn 12101-3Mohammad100% (1)
- CBSE Class 10 Physics Electricity (1) - RemovedDokument29 SeitenCBSE Class 10 Physics Electricity (1) - RemovedAtul BiloniyaNoch keine Bewertungen
- Lebanese International University School of EngineeringDokument9 SeitenLebanese International University School of EngineeringMohamad AyoubNoch keine Bewertungen
- Grumman OV-1 Mohawk Operators Manual PDFDokument531 SeitenGrumman OV-1 Mohawk Operators Manual PDFDave91Noch keine Bewertungen
- Report of Investigation: National Institute of Standards & TechnologyDokument10 SeitenReport of Investigation: National Institute of Standards & Technology박만진Noch keine Bewertungen
- RCC - Civil Engineering Objective QuestionsDokument9 SeitenRCC - Civil Engineering Objective Questionsutsav_koshtiNoch keine Bewertungen
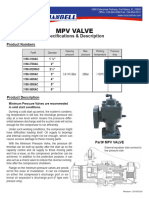
- Hanbell MPV Valve Spec SheetDokument1 SeiteHanbell MPV Valve Spec SheetDũng LêNoch keine Bewertungen
- Pmso - Question BankDokument4 SeitenPmso - Question BankdarshanNoch keine Bewertungen
- Zhang Et Al-2013-Scientific ReportsDokument6 SeitenZhang Et Al-2013-Scientific Reportscbs78Noch keine Bewertungen
- Wholeness, Timelessness, and Unfolding MeaningDokument13 SeitenWholeness, Timelessness, and Unfolding MeaningPamela ChapmanNoch keine Bewertungen
- HW05Dokument4 SeitenHW05Potatoes123Noch keine Bewertungen
- C ELECTRICS-MACHINE CAB & ENGINE parts listDokument3 SeitenC ELECTRICS-MACHINE CAB & ENGINE parts listАлексейNoch keine Bewertungen
- Find Centroid of Basic Geometric ShapesDokument64 SeitenFind Centroid of Basic Geometric ShapesKazi Afroz AlamNoch keine Bewertungen
- Reinforcement Activities DLPDokument24 SeitenReinforcement Activities DLPaidarahim0205Noch keine Bewertungen
- Pyramidal Horn Antenna Design GuideDokument38 SeitenPyramidal Horn Antenna Design GuideJocaNoch keine Bewertungen
- Out, Up, and Through - Fault Tolerant TennisDokument7 SeitenOut, Up, and Through - Fault Tolerant TennishosoksnbNoch keine Bewertungen
- Notes Chapter 18-1Dokument65 SeitenNotes Chapter 18-1Biruk BtNoch keine Bewertungen
- CV of Associate Professor Aftab AlamDokument9 SeitenCV of Associate Professor Aftab AlamSupriyo DuttaNoch keine Bewertungen
- Magwave - Test Method and ProcedureDokument1 SeiteMagwave - Test Method and Procedurejesus cesar tiburcio pelaezNoch keine Bewertungen