Das könnte Ihnen auch gefallen
- Z80InstructionSetSummary (Functionorder)Dokument18 SeitenZ80InstructionSetSummary (Functionorder)tienthangvietNoch keine Bewertungen
- Activation InfoDokument1 SeiteActivation InfotienthangvietNoch keine Bewertungen
- Parameter Documents Lift GearlessDokument1 SeiteParameter Documents Lift GearlesstienthangvietNoch keine Bewertungen
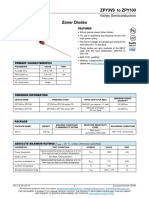
- Zpy 3 V 9Dokument5 SeitenZpy 3 V 9tienthangvietNoch keine Bewertungen
- Z 80 EngDokument5 SeitenZ 80 EngtienthangvietNoch keine Bewertungen
- Convertir A BCDDokument14 SeitenConvertir A BCDghostogNoch keine Bewertungen
- Zpy 3 V 9Dokument5 SeitenZpy 3 V 9tienthangvietNoch keine Bewertungen
- Z80 Instruction Set SummaryDokument4 SeitenZ80 Instruction Set SummarykpoxphuongNoch keine Bewertungen
- ReadmeDokument5 SeitenReadmetienthangvietNoch keine Bewertungen
- Safety CircuitDokument1 SeiteSafety CircuittienthangvietNoch keine Bewertungen
- Downloaded From Manuals Search EngineDokument24 SeitenDownloaded From Manuals Search EnginetienthangvietNoch keine Bewertungen
- Sine Wave Generation and Implementation Using DsPIC33FJDokument27 SeitenSine Wave Generation and Implementation Using DsPIC33FJpaaraib100% (1)
- Ampm GSM m95Dokument1 SeiteAmpm GSM m95tienthangvietNoch keine Bewertungen
- Zxgd3009dy 611094Dokument9 SeitenZxgd3009dy 611094tienthangvietNoch keine Bewertungen
- Hoistway SWDokument1 SeiteHoistway SWtienthangvietNoch keine Bewertungen
- Cateye Cordless 2 Manual.Dokument2 SeitenCateye Cordless 2 Manual.DanNoch keine Bewertungen
- Random assortment of text and charactersDokument22 SeitenRandom assortment of text and characterstienthangvietNoch keine Bewertungen
- Rasper 51Dokument20 SeitenRasper 51tienthangvietNoch keine Bewertungen
- Mpu 60502Dokument19 SeitenMpu 60502tienthangvietNoch keine Bewertungen
- Mpu 6050Dokument18 SeitenMpu 6050tienthangvietNoch keine Bewertungen
- Rasper 47Dokument17 SeitenRasper 47tienthangvietNoch keine Bewertungen
- Rasper 57Dokument26 SeitenRasper 57tienthangvietNoch keine Bewertungen
- Rasper 56Dokument26 SeitenRasper 56tienthangvietNoch keine Bewertungen
- Mpu 60503Dokument20 SeitenMpu 60503tienthangvietNoch keine Bewertungen
- ReadmeDokument7 SeitenReadmetienthangvietNoch keine Bewertungen
- Rasper 55Dokument24 SeitenRasper 55tienthangvietNoch keine Bewertungen
- Rasper 48Dokument18 SeitenRasper 48tienthangvietNoch keine Bewertungen
- Rasper 50Dokument19 SeitenRasper 50tienthangvietNoch keine Bewertungen
- Rasper 52Dokument20 SeitenRasper 52tienthangvietNoch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5784)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (890)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (72)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Drager Primus Service Manual en PDFDokument336 SeitenDrager Primus Service Manual en PDFAyaovi Jorlau100% (2)
- DCPO Pretest SCRDokument5 SeitenDCPO Pretest SCRWill Larsen33% (3)
- 1 Er Eer 1Dokument5 Seiten1 Er Eer 1Dream CarsNoch keine Bewertungen
- BlackBerry 10 OS 10.3.2.2474-10.3.2.2836-Release Notes-EnDokument7 SeitenBlackBerry 10 OS 10.3.2.2474-10.3.2.2836-Release Notes-EnAtish Kumar ChouhanNoch keine Bewertungen
- Bim - RipacDokument11 SeitenBim - RipacxnazmiexNoch keine Bewertungen
- Unit-3 2 Multiprocessor SystemsDokument12 SeitenUnit-3 2 Multiprocessor SystemsmirdanishmajeedNoch keine Bewertungen
- PICASA Software DocumentationDokument12 SeitenPICASA Software DocumentationFurrukh MahmoodNoch keine Bewertungen
- Bin 414720 MexicoDokument35 SeitenBin 414720 Mexicolunavidal_m5Noch keine Bewertungen
- Disaster Recovery Plan 2010Dokument59 SeitenDisaster Recovery Plan 2010roseNoch keine Bewertungen
- DPR 1000 Manual PDFDokument45 SeitenDPR 1000 Manual PDFedgarcoo100% (1)
- CST06105 - Fundamentals of OOP Introductory Lecture Dr. Msury Mahunnah E-Mail: Msury - Mahunnah@ifm - Ac.tzDokument29 SeitenCST06105 - Fundamentals of OOP Introductory Lecture Dr. Msury Mahunnah E-Mail: Msury - Mahunnah@ifm - Ac.tzsteward materuNoch keine Bewertungen
- Neha Mishra QA Engineer resume highlighting 3.5 years experienceDokument3 SeitenNeha Mishra QA Engineer resume highlighting 3.5 years experienceSusheel KumarNoch keine Bewertungen
- BTS3911E Technical DescriptionDokument35 SeitenBTS3911E Technical DescriptionleonardomarinNoch keine Bewertungen
- Space Shooter FinalDokument25 SeitenSpace Shooter FinalPartho Protim100% (2)
- Kumpulan Kuis KuisDokument24 SeitenKumpulan Kuis KuisRani Maharani100% (1)
- Towerwin V.3.3: Automatic Tower DesignerDokument62 SeitenTowerwin V.3.3: Automatic Tower DesignerNathanNoch keine Bewertungen
- LLVM Clang - Advancing Compiler TechnologyDokument28 SeitenLLVM Clang - Advancing Compiler TechnologyRaymond TayNoch keine Bewertungen
- Serial Number Microsoft Office Professioanal 2010Dokument6 SeitenSerial Number Microsoft Office Professioanal 2010Kono KonoNoch keine Bewertungen
- Data Normalization ExplainedDokument27 SeitenData Normalization ExplainedChetna KohliNoch keine Bewertungen
- GPS GSM Tracker GT 280Dokument45 SeitenGPS GSM Tracker GT 280Mladen Jankovic DjomlaNoch keine Bewertungen
- 5 Pen PC TechnologyDokument16 Seiten5 Pen PC TechnologyArchana Muthangari100% (1)
- Syllabus - Data Mining Solution With WekaDokument5 SeitenSyllabus - Data Mining Solution With WekaJaya WijayaNoch keine Bewertungen
- Woodsmith - 100Dokument31 SeitenWoodsmith - 100rsotoqp100% (2)
- Fastcase User GuideDokument9 SeitenFastcase User Guideapi-1281913Noch keine Bewertungen
- Being Himachali - ... - .Dokument4 SeitenBeing Himachali - ... - .nk637Noch keine Bewertungen
- FrancisJayYumul Philippines 8.09 YrsDokument2 SeitenFrancisJayYumul Philippines 8.09 YrsJV FNoch keine Bewertungen
- Win32 API Reference For HLA - GDI32 PDFDokument126 SeitenWin32 API Reference For HLA - GDI32 PDFz4rm4rNoch keine Bewertungen
- Method Overloading and Method Overriding in JavaDokument3 SeitenMethod Overloading and Method Overriding in JavatitobesaleelNoch keine Bewertungen
- ADC Guide: Analog-to-Digital Conversion BasicsDokument30 SeitenADC Guide: Analog-to-Digital Conversion BasicsBenedict JoNoch keine Bewertungen
- Staad FoundationDokument25 SeitenStaad FoundationAnonymous nwByj9L100% (2)