Das könnte Ihnen auch gefallen
- OptimizationDokument96 SeitenOptimizationGuruKPO67% (3)
- Modelling Asynchronous Machines by Electric Circuits: SebestyenDokument27 SeitenModelling Asynchronous Machines by Electric Circuits: Sebestyenni60Noch keine Bewertungen
- PMSM 3Dokument4 SeitenPMSM 3VegembogaNoch keine Bewertungen
- Spiral Vector Theory of Brushless DC MotorDokument8 SeitenSpiral Vector Theory of Brushless DC Motorrigo84Noch keine Bewertungen
- Comparison of Field Oriented Control and Direct Torque Control For Permanent Magnet Synchronous Motor PMSMDokument6 SeitenComparison of Field Oriented Control and Direct Torque Control For Permanent Magnet Synchronous Motor PMSMjp_20_20Noch keine Bewertungen
- The DQ Transformation and Feedback Linearization of A Permanent Magnet Synchronous MotorDokument5 SeitenThe DQ Transformation and Feedback Linearization of A Permanent Magnet Synchronous MotorUzairChaudharyNoch keine Bewertungen
- Short Circuit Current Forces PDFDokument4 SeitenShort Circuit Current Forces PDFDaniel MemijeNoch keine Bewertungen
- On Modelling Iron Core NonlinearitiesDokument9 SeitenOn Modelling Iron Core Nonlinearitiesjdjjarami100% (1)
- Direct Torque ControlDokument5 SeitenDirect Torque ControljanusanusNoch keine Bewertungen
- Design and Simulation of Control System For Bearingless Synchronous Reluctance Motor PDFDokument5 SeitenDesign and Simulation of Control System For Bearingless Synchronous Reluctance Motor PDFKrishnam NaiduNoch keine Bewertungen
- Computation of Leakage Flux and Magnetic Force in Transformer by Using Field-Circuit Coupled Finite Element MethodDokument4 SeitenComputation of Leakage Flux and Magnetic Force in Transformer by Using Field-Circuit Coupled Finite Element MethodmehdivinciNoch keine Bewertungen
- Simulation and Analysis Calculation of PMBLDCM Based On Time-Stepping Finite Element and Matlab MethodsDokument4 SeitenSimulation and Analysis Calculation of PMBLDCM Based On Time-Stepping Finite Element and Matlab Methodsபொன்னியின் செல்வன்Noch keine Bewertungen
- Small Signal Stability AnalysisDokument6 SeitenSmall Signal Stability AnalysischeshankarNoch keine Bewertungen
- Campeanu Tranzitoriu SincronDokument10 SeitenCampeanu Tranzitoriu SincronvalentinmullerNoch keine Bewertungen
- Induction Motor FattynessDokument6 SeitenInduction Motor FattynessMuhammad Ali Masood CheemaNoch keine Bewertungen
- Modeling Induction Motors: Abstract: in This Paper, A Novel Technique For On-Line Estimation of MostDokument10 SeitenModeling Induction Motors: Abstract: in This Paper, A Novel Technique For On-Line Estimation of Mostseshubabu_999Noch keine Bewertungen
- Modeling, Simulation, and Analysis of Permanent-Magnet Motor Drives, The Brushless DC Motor DriveDokument6 SeitenModeling, Simulation, and Analysis of Permanent-Magnet Motor Drives, The Brushless DC Motor Drivekishan kharelNoch keine Bewertungen
- Extreme Possibilities of Circuital Models of Electric MachinesDokument10 SeitenExtreme Possibilities of Circuital Models of Electric Machinesmherold2Noch keine Bewertungen
- Modeling and Dynamic Simulation of Permanent Magnet Brushless DC Motor (PMBLDCM) DrivesDokument2 SeitenModeling and Dynamic Simulation of Permanent Magnet Brushless DC Motor (PMBLDCM) DrivesmillionNoch keine Bewertungen
- Transactionson Power Systems On Modelling Iron Core NonlinearitiesDokument9 SeitenTransactionson Power Systems On Modelling Iron Core NonlinearitiesRafael BarrosNoch keine Bewertungen
- Development of Analytical Approach For Linear Switched Reluctance Motor and Its Validation by Two Dimensional FEA (Mahmoud 2014)Dokument15 SeitenDevelopment of Analytical Approach For Linear Switched Reluctance Motor and Its Validation by Two Dimensional FEA (Mahmoud 2014)arnika33100% (1)
- Modeling of Permanent Magnet Motor Drives: Ieee Transactions On Industrial Electronics, Vol. NO 4, NovemberDokument5 SeitenModeling of Permanent Magnet Motor Drives: Ieee Transactions On Industrial Electronics, Vol. NO 4, NovemberMeena RamNoch keine Bewertungen
- 3D MSC/EMAS Simulation of A Three Phase Power Transformer by Means of Anisotropic Material PropertiesDokument11 Seiten3D MSC/EMAS Simulation of A Three Phase Power Transformer by Means of Anisotropic Material PropertiesConstantin DorinelNoch keine Bewertungen
- A STUDY ON DETERMINATION OF PARAMETERS FOR PERMANENT MAGNET Synchro PDFDokument6 SeitenA STUDY ON DETERMINATION OF PARAMETERS FOR PERMANENT MAGNET Synchro PDFPolo DelgadoNoch keine Bewertungen
- JESV5SI0109Dokument5 SeitenJESV5SI0109Kiran YaddanapudiNoch keine Bewertungen
- Arindam Seminar 11Dokument6 SeitenArindam Seminar 11Arindam BhattacharjeeNoch keine Bewertungen
- Design and Simulation of Field Oriented Control of VSI Fed Induction Motor DriveDokument10 SeitenDesign and Simulation of Field Oriented Control of VSI Fed Induction Motor Drivesuhail ahmadNoch keine Bewertungen
- 87 Kutt Michna PopDokument6 Seiten87 Kutt Michna PopVally ZazaNoch keine Bewertungen
- Current Control of PMSMDokument6 SeitenCurrent Control of PMSMRintuMathunniNoch keine Bewertungen
- Matrix Analysis Techniques in Cage Induction Machines: David G. DorrellDokument7 SeitenMatrix Analysis Techniques in Cage Induction Machines: David G. Dorrellni60Noch keine Bewertungen
- Improved Design For Reduction of Torque Ripple of Brushless DC MotorDokument4 SeitenImproved Design For Reduction of Torque Ripple of Brushless DC MotorPhạm Văn TưởngNoch keine Bewertungen
- Modeling and Simulation of A PWM Rectifier Inverter Induction Motor Drive System Implementing Speed Sensor Less Direct Vector ControlDokument6 SeitenModeling and Simulation of A PWM Rectifier Inverter Induction Motor Drive System Implementing Speed Sensor Less Direct Vector ControlFarhan SarwarNoch keine Bewertungen
- Prediction of Harmonics Produced by Multiple Variable Speed Drives With Randomly Fluctuating LoadsDokument5 SeitenPrediction of Harmonics Produced by Multiple Variable Speed Drives With Randomly Fluctuating LoadsAamir JavedNoch keine Bewertungen
- PM Linear ActuatorDokument7 SeitenPM Linear ActuatorGthulasi78Noch keine Bewertungen
- Modelling A Linear and Limited Travel SolenoidDokument6 SeitenModelling A Linear and Limited Travel SolenoidsayproNoch keine Bewertungen
- Regular Paper Impact of Mechanical Forces in A 25ka Current Injection TransformerDokument14 SeitenRegular Paper Impact of Mechanical Forces in A 25ka Current Injection TransformerConstantin DorinelNoch keine Bewertungen
- Xiicleee RBP 1754revDokument6 SeitenXiicleee RBP 1754revrbargallo0Noch keine Bewertungen
- Meng-Jen Chen, Yu-Chi Wu, Jie-Lu Liao, Jin-Yuan Lin, Hsien-Yin Chiang, and Wen-Liang HuangDokument10 SeitenMeng-Jen Chen, Yu-Chi Wu, Jie-Lu Liao, Jin-Yuan Lin, Hsien-Yin Chiang, and Wen-Liang HuangGeet DeokateNoch keine Bewertungen
- 06 - T190 - Roma Rinkeviciene - Modelling AC Induction Drive With PSpice PDFDokument4 Seiten06 - T190 - Roma Rinkeviciene - Modelling AC Induction Drive With PSpice PDFKUNDANLANSNoch keine Bewertungen
- State Space Analysis of Power System Stability EnhDokument6 SeitenState Space Analysis of Power System Stability EnhAmmar MyhoubNoch keine Bewertungen
- Carrier Signal Based Sensorless Control of Electrically Excited Synchronous PDFDokument10 SeitenCarrier Signal Based Sensorless Control of Electrically Excited Synchronous PDFKhaled ChaibainouNoch keine Bewertungen
- IJCER (WWW - Ijceronline.com) International Journal of Computational Engineering ResearchDokument5 SeitenIJCER (WWW - Ijceronline.com) International Journal of Computational Engineering ResearchInternational Journal of computational Engineering research (IJCER)Noch keine Bewertungen
- Nonlinear Mathematical Modeling and Simulation of Switched Reluctance MotorDokument6 SeitenNonlinear Mathematical Modeling and Simulation of Switched Reluctance MotorAkshay ArksaliNoch keine Bewertungen
- Oscillatory Synchronous Linear Motor With Permanent-Magnet ExcitationDokument5 SeitenOscillatory Synchronous Linear Motor With Permanent-Magnet ExcitationJon JonNoch keine Bewertungen
- Casoria 2003Dokument12 SeitenCasoria 2003waael abdulhassanNoch keine Bewertungen
- Space Vector Flux Weakening Control of PMSM DriverDokument8 SeitenSpace Vector Flux Weakening Control of PMSM DriverOsama AttookNoch keine Bewertungen
- Machine Simulation ModelsDokument22 SeitenMachine Simulation ModelsAshwani RanaNoch keine Bewertungen
- Calculation of Short Circuit Reactance and Electromagnetic Forces in Three Phase Transformer by Finite Element MethodDokument6 SeitenCalculation of Short Circuit Reactance and Electromagnetic Forces in Three Phase Transformer by Finite Element MethodJay JoshiNoch keine Bewertungen
- Dynamic Modeling of PMSMDokument10 SeitenDynamic Modeling of PMSMHisham Magdi El DeebNoch keine Bewertungen
- IM FEM AnalysisDokument20 SeitenIM FEM AnalysisvishiwizardNoch keine Bewertungen
- 10 - Overvoltage Calculation by Monte Carlo Method With Accurate Substation Components Modeling PDFDokument5 Seiten10 - Overvoltage Calculation by Monte Carlo Method With Accurate Substation Components Modeling PDFAnonymous IjLgxu9fXPNoch keine Bewertungen
- Under Voltage Unbalance Using Circle: Analysis of Induction Motor The Diagram MethodDokument6 SeitenUnder Voltage Unbalance Using Circle: Analysis of Induction Motor The Diagram MethodHershal RockksNoch keine Bewertungen
- On Identification of Synchronous Machine Parameters Using DC Decay TestDokument5 SeitenOn Identification of Synchronous Machine Parameters Using DC Decay TestmcrahanNoch keine Bewertungen
- MATLAB SIMULINK Based DQ Modeling and Dynamic Characteristics of Three Phase Self Excited PDFDokument5 SeitenMATLAB SIMULINK Based DQ Modeling and Dynamic Characteristics of Three Phase Self Excited PDFBhushan MankarNoch keine Bewertungen
- Jaswant Scopus PaperDokument15 SeitenJaswant Scopus PaperpreetivermaeeeNoch keine Bewertungen
- Stator Winding Induction Motor in The EMTPDokument8 SeitenStator Winding Induction Motor in The EMTPEleazar Sierra EspinozaNoch keine Bewertungen
- An Investigation of The Harmonic Characteristics of Transformer Excitation Current Under Nonsinusoidal Supply VoltageDokument9 SeitenAn Investigation of The Harmonic Characteristics of Transformer Excitation Current Under Nonsinusoidal Supply VoltageJAY PARIKHNoch keine Bewertungen
- Research Article: Simulations of Transformer Inrush Current by Using BDF-Based Numerical MethodsDokument11 SeitenResearch Article: Simulations of Transformer Inrush Current by Using BDF-Based Numerical MethodsDavid LopesNoch keine Bewertungen
- Mathematical Driving Model of Three Phase Induction Motors in Stationary Coordinate FrameDokument11 SeitenMathematical Driving Model of Three Phase Induction Motors in Stationary Coordinate Framegodspower brunoNoch keine Bewertungen
- Advantest r6441 DMM User ManualDokument263 SeitenAdvantest r6441 DMM User Manualhieuhuech1Noch keine Bewertungen
- 2SP0115T Control IGBT ManualDokument21 Seiten2SP0115T Control IGBT Manualhieuhuech1Noch keine Bewertungen
- Real-Time Interface Dspace DSDokument12 SeitenReal-Time Interface Dspace DShieuhuech1Noch keine Bewertungen
- Tektronix A6303 070390504Dokument34 SeitenTektronix A6303 070390504hieuhuech1Noch keine Bewertungen
- TDS7000 SeriesDokument254 SeitenTDS7000 Serieshieuhuech1Noch keine Bewertungen
- Sanwa pc500Dokument42 SeitenSanwa pc500hieuhuech1Noch keine Bewertungen
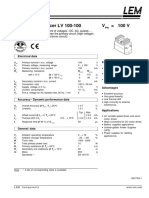
- Lem Voltage 100-500Dokument2 SeitenLem Voltage 100-500hieuhuech1Noch keine Bewertungen
- Msp-Exp430G2 Launchpad Workshop: - Meet The Launchpad - Lab 1: Blink Launchpad LedsDokument16 SeitenMsp-Exp430G2 Launchpad Workshop: - Meet The Launchpad - Lab 1: Blink Launchpad Ledshieuhuech1Noch keine Bewertungen
- Stator Flux and Speed - HADokument6 SeitenStator Flux and Speed - HAhieuhuech1Noch keine Bewertungen
- Simulation Study On Speed Control of Permanent Magnet Direct-Driven System For Mining ScraperDokument11 SeitenSimulation Study On Speed Control of Permanent Magnet Direct-Driven System For Mining Scraperhieuhuech1Noch keine Bewertungen
- Fod8316 108263Dokument30 SeitenFod8316 108263hieuhuech1Noch keine Bewertungen
- Design of A Microcontroller-Based Circuit For Software ProtectionDokument6 SeitenDesign of A Microcontroller-Based Circuit For Software Protectionhieuhuech1Noch keine Bewertungen
- Speed Control Design of A PMSM Based On Functional Model Predictive ApproachDokument15 SeitenSpeed Control Design of A PMSM Based On Functional Model Predictive Approachhieuhuech1Noch keine Bewertungen
- Ansys Chu y Chicago Modeling and Simulation of Brushless DC Motor Drive SystemDokument25 SeitenAnsys Chu y Chicago Modeling and Simulation of Brushless DC Motor Drive Systemhieuhuech1Noch keine Bewertungen
- Sensorless Foc of PMSM Chu YDokument42 SeitenSensorless Foc of PMSM Chu Yhieuhuech1Noch keine Bewertungen
- Special Purpose Motors and Control DevicesDokument43 SeitenSpecial Purpose Motors and Control DevicesDominick BasNoch keine Bewertungen
- ASDA-A2 Katalógus (Angol) PDFDokument76 SeitenASDA-A2 Katalógus (Angol) PDFBoy Krisna SusantoNoch keine Bewertungen
- SSP 994466AG The 8-Speed Automatic Gearbox 0C8Dokument51 SeitenSSP 994466AG The 8-Speed Automatic Gearbox 0C8sheba1023100% (3)
- Protective Relaying and TestingDokument19 SeitenProtective Relaying and Testingsherub wangdiNoch keine Bewertungen
- AC MachineDokument3 SeitenAC MachineSudershan DolliNoch keine Bewertungen
- Fmea Vda Hand BookDokument51 SeitenFmea Vda Hand BookS VenkatasubramanianNoch keine Bewertungen
- 2 - Hydro Power and Synchronous MachinesDokument49 Seiten2 - Hydro Power and Synchronous MachinesvignanbNoch keine Bewertungen
- Advanced Motor Starting Analysis ProgramDokument66 SeitenAdvanced Motor Starting Analysis ProgramgilbertomjcNoch keine Bewertungen
- DC MotorDokument21 SeitenDC MotorSameera MadhushankaNoch keine Bewertungen
- Motors - RRM - AC Mill Duty MotorDokument4 SeitenMotors - RRM - AC Mill Duty MotorAshishNoch keine Bewertungen
- Brushless DC MotorDokument6 SeitenBrushless DC Motorpsksiva13Noch keine Bewertungen
- 641 Guide On Economic Evaluation of Refurbishment Replacement Decisions On GeneratorsDokument74 Seiten641 Guide On Economic Evaluation of Refurbishment Replacement Decisions On Generatorswoop100% (1)
- Attrition ScrubbersDokument39 SeitenAttrition ScrubbersVic Andres E. AracenaNoch keine Bewertungen
- Abe 150 Lab Report Manual Ex 01Dokument10 SeitenAbe 150 Lab Report Manual Ex 01John Kennedy EvangelistaNoch keine Bewertungen
- EbaraDokument34 SeitenEbaramoch rizki darmawanNoch keine Bewertungen
- Cramaco Manual de Instrução g2r 160-315 Inglês Rev1Dokument29 SeitenCramaco Manual de Instrução g2r 160-315 Inglês Rev1MárcioHenriqueNoch keine Bewertungen
- QSI-335i/370i QSI-440i/500i: Parts ManualDokument88 SeitenQSI-335i/370i QSI-440i/500i: Parts ManualJ&CNoch keine Bewertungen
- Unit 4Dokument32 SeitenUnit 4monikandakumar ramachandranNoch keine Bewertungen
- PI734C - Technical Data SheetDokument8 SeitenPI734C - Technical Data SheetBudi SNoch keine Bewertungen
- ABEN70 LectureDokument547 SeitenABEN70 LecturePearl AngelieNoch keine Bewertungen
- HCI634H - Winding 311 and 312: Technical Data SheetDokument9 SeitenHCI634H - Winding 311 and 312: Technical Data SheetAlberto AraripeNoch keine Bewertungen
- Workshop Small NewDokument36 SeitenWorkshop Small Newesteban marinkovicNoch keine Bewertungen
- DC GeneratorDokument71 SeitenDC GeneratorRenz Xynor Liotib CadizNoch keine Bewertungen
- PATENT - Axial Flux Motor AssemblyDokument13 SeitenPATENT - Axial Flux Motor Assemblyrakeshee2007Noch keine Bewertungen
- Low Voltage Induction Motors (E) 64PDokument64 SeitenLow Voltage Induction Motors (E) 64PMarcos Vinicios Lima dos SantosNoch keine Bewertungen
- US9279413Dokument15 SeitenUS9279413yuanbo0411Noch keine Bewertungen
- S7L1D-F4 Wdg.312 - Technical Data SheetDokument9 SeitenS7L1D-F4 Wdg.312 - Technical Data Sheet3efooNoch keine Bewertungen
- Simscape TutorialDokument22 SeitenSimscape TutorialFilipeNoch keine Bewertungen
- Unit - V Synchronous Drives: 1 Variable Frequency ControlDokument22 SeitenUnit - V Synchronous Drives: 1 Variable Frequency ControlHaripriya PalemNoch keine Bewertungen
- Inertia Dyno Design GuideDokument19 SeitenInertia Dyno Design Guidedumaster100% (3)