Das könnte Ihnen auch gefallen
- Exercises in Electronics: Operational Amplifier CircuitsVon EverandExercises in Electronics: Operational Amplifier CircuitsBewertung: 3 von 5 Sternen3/5 (1)
- Power and Torque in Synchronous Generators: App MDokument52 SeitenPower and Torque in Synchronous Generators: App MHanan ShayiboNoch keine Bewertungen
- Steps To Solve Power Flow Analysis For DummiesDokument6 SeitenSteps To Solve Power Flow Analysis For DummiesAhmad Fateh Mohamad NorNoch keine Bewertungen
- V and Inverted V Curves of Synchronous MotorDokument7 SeitenV and Inverted V Curves of Synchronous Motorkarthikeyan249Noch keine Bewertungen
- DC Machine Example ProblemsDokument4 SeitenDC Machine Example ProblemsFemi Prince0% (1)
- AC Voltage Controllers: AC To Ac ConvertersDokument25 SeitenAC Voltage Controllers: AC To Ac ConvertersPhạm Hữu Kỳ0% (1)
- Glover 10 ExDokument13 SeitenGlover 10 ExAseel Bait MaditNoch keine Bewertungen
- 1710-EET2166 Three Phase Circuits - SlidesDokument33 Seiten1710-EET2166 Three Phase Circuits - SlidesLucas LeeNoch keine Bewertungen
- Synchronous Motors SlidesDokument55 SeitenSynchronous Motors SlidesKaye Freyssinet Nermal Abanggan100% (1)
- Lecture1 Singly Excited SystemDokument79 SeitenLecture1 Singly Excited SystemMuhammad Umar Ijaz86% (7)
- Transformer On Load PDFDokument14 SeitenTransformer On Load PDFSnr Berel ShepherdNoch keine Bewertungen
- Acdc - Synchronous Motor - Lecture Notes 9Dokument19 SeitenAcdc - Synchronous Motor - Lecture Notes 9Cllyan Reyes100% (1)
- D.C Machine DesignDokument23 SeitenD.C Machine DesignMAsifNazeerNoch keine Bewertungen
- DC Series Motor Single Phase Half & Full Controlled DrivesDokument11 SeitenDC Series Motor Single Phase Half & Full Controlled DrivesUjjal Dey100% (1)
- Auto TransformerDokument20 SeitenAuto TransformerDawa PenjorNoch keine Bewertungen
- AC Machines Alternators 2Dokument10 SeitenAC Machines Alternators 2Vanvan BitonNoch keine Bewertungen
- 4 Controlled Rectifier DC DrivesDokument25 Seiten4 Controlled Rectifier DC DrivesshonmlrNoch keine Bewertungen
- Capacitor Start/Run Induction Motor: ExperimentDokument9 SeitenCapacitor Start/Run Induction Motor: ExperimentMarcos Roberto ReinertNoch keine Bewertungen
- UNIT-1 DC Machines: ConstructionDokument54 SeitenUNIT-1 DC Machines: ConstructionT.ThilagamaniNoch keine Bewertungen
- Experiment No.3-Voltage Regulation of A 3-Phase Alternator by ZPF and ASA MethodDokument6 SeitenExperiment No.3-Voltage Regulation of A 3-Phase Alternator by ZPF and ASA Method61EEPrabhat Pal100% (1)
- Cap 5Dokument29 SeitenCap 5deberes ucacueNoch keine Bewertungen
- Lab 13-Under Voltage and Over Voltage Monitoring Numerical RelayDokument5 SeitenLab 13-Under Voltage and Over Voltage Monitoring Numerical RelayAliza Sharif100% (1)
- Lecture 07 TransformerDokument16 SeitenLecture 07 TransformerSyed AfzalNoch keine Bewertungen
- Study of StartersDokument6 SeitenStudy of StartersGANESH KUMAR B eee2018Noch keine Bewertungen
- Induction Motor Electric BrakingDokument12 SeitenInduction Motor Electric Brakingmastanamma.Y100% (1)
- BrakingDokument19 SeitenBrakingMohammad Umar RehmanNoch keine Bewertungen
- Electrical and Electronics Measurements and Instrumentation-77-Đã Chuyển ĐổiDokument9 SeitenElectrical and Electronics Measurements and Instrumentation-77-Đã Chuyển ĐổiNguyên Nguyễn SơnNoch keine Bewertungen
- Speed Control of Three Phase Slip Ring Induction Motor at Variable Load ConditionDokument3 SeitenSpeed Control of Three Phase Slip Ring Induction Motor at Variable Load Conditionhi100% (1)
- Transformer Design Module 2 NewDokument17 SeitenTransformer Design Module 2 NewRajath SuryaNoch keine Bewertungen
- #All About RelayDokument10 Seiten#All About RelayRitika JainNoch keine Bewertungen
- Special Electrical Machines Ee2403 PDFDokument16 SeitenSpecial Electrical Machines Ee2403 PDFsamyramu100% (3)
- Power Electronics & Drives: Unit: 1 Power Semiconductor DevicesDokument24 SeitenPower Electronics & Drives: Unit: 1 Power Semiconductor DevicesTapobroto ChatterjeeNoch keine Bewertungen
- Part Ii: Electrical Drives Chapter TenDokument37 SeitenPart Ii: Electrical Drives Chapter TenDawit Shimeles TesfayeNoch keine Bewertungen
- 2 Synchronous Generator WithansDokument19 Seiten2 Synchronous Generator WithansIncst Bhai0% (1)
- Emf Equation of AlternatorDokument2 SeitenEmf Equation of AlternatorThe Engineers EDGE, CoimbatoreNoch keine Bewertungen
- Lecture Objectives: Working Principle of Alternator OR Synchronous Generator StatorDokument5 SeitenLecture Objectives: Working Principle of Alternator OR Synchronous Generator StatorZ_JahangeerNoch keine Bewertungen
- Eee-Vi-power System Analysis and Stability (10ee61) - NotesDokument119 SeitenEee-Vi-power System Analysis and Stability (10ee61) - NotesNurul Islam Faruk0% (1)
- Four Quadrant Operation of DC Drives: - Dual ConvertersDokument12 SeitenFour Quadrant Operation of DC Drives: - Dual ConvertersDr.K.Krishna Veni ProfessorNoch keine Bewertungen
- Types of Armature WindingDokument2 SeitenTypes of Armature WindingCastello Akar100% (1)
- Unit-5 Question Bank: Pole Arc 0.64 Pole PitchDokument15 SeitenUnit-5 Question Bank: Pole Arc 0.64 Pole Pitchblaze emberNoch keine Bewertungen
- Questions & Answers On Efficiency and Voltage RegulationDokument18 SeitenQuestions & Answers On Efficiency and Voltage Regulationkibrom atsbhaNoch keine Bewertungen
- Experiment No.5-Determination of XD and XQ of Synchronous Machine by Slip TestDokument3 SeitenExperiment No.5-Determination of XD and XQ of Synchronous Machine by Slip Test61EEPrabhat PalNoch keine Bewertungen
- DC Motor Drives 2007Dokument48 SeitenDC Motor Drives 2007stubborn002Noch keine Bewertungen
- Chapter 8 - Voltage RegulatorDokument18 SeitenChapter 8 - Voltage RegulatorMuhammad AliNoch keine Bewertungen
- Tutorial Exercise On DC MachineDokument13 SeitenTutorial Exercise On DC MachineTSEGAAB NIGUSSENoch keine Bewertungen
- Design Considerations For An LLC Resonant ConverterDokument29 SeitenDesign Considerations For An LLC Resonant Converterbacuoc.nguyen356Noch keine Bewertungen
- Power Electronics (Ques - Ch2 - Rectifiers) PDFDokument44 SeitenPower Electronics (Ques - Ch2 - Rectifiers) PDFmadivala nagaraja0% (1)
- Speed Control of DC Shunt MotorDokument7 SeitenSpeed Control of DC Shunt MotorAakash0% (1)
- HET 225 HEt 228 Tutorial 3 Solution S2 2014Dokument4 SeitenHET 225 HEt 228 Tutorial 3 Solution S2 2014Ibrahim Hussain0% (1)
- Pe Tutorial 3 - 2 PDFDokument13 SeitenPe Tutorial 3 - 2 PDFkibrom atsbhaNoch keine Bewertungen
- Chapter - 2 DC & AC BridgesDokument18 SeitenChapter - 2 DC & AC Bridgesvnyshreyas100% (2)
- Half Wave Rectification Experiment - 3: TheoryDokument10 SeitenHalf Wave Rectification Experiment - 3: TheoryLakshayNoch keine Bewertungen
- 2.back To Back Test On Two Similar TransformersDokument5 Seiten2.back To Back Test On Two Similar Transformersmandadi_sailesh50% (2)
- DC Machines Lab Manual PDFDokument54 SeitenDC Machines Lab Manual PDFMuralichintakailuNoch keine Bewertungen
- Starting Methods of A DC MotorDokument8 SeitenStarting Methods of A DC Motoragreykato100% (1)
- Transfer Function of DC MotorDokument16 SeitenTransfer Function of DC Motorlaabi340% (5)
- TF Armature Controlled DC MotorDokument9 SeitenTF Armature Controlled DC Motoremail2vadivel100% (2)
- EE 2257-Control Systems Lab ManualDokument66 SeitenEE 2257-Control Systems Lab ManualRam KumarNoch keine Bewertungen
- DC Motor Control PositionDokument8 SeitenDC Motor Control Positionreynaldi adeNoch keine Bewertungen
- Analysis of Electrical Machines BankDokument66 SeitenAnalysis of Electrical Machines BankChilambarasan MadhappanNoch keine Bewertungen
- 5.stability Issues of Synchronous MotorDokument6 Seiten5.stability Issues of Synchronous MotorchethanNoch keine Bewertungen
- 3.operation When Feeding A Local Load, Synchronization & Grid FailureDokument19 Seiten3.operation When Feeding A Local Load, Synchronization & Grid FailurechethanNoch keine Bewertungen
- 4.power Systems & Synchronous Motor Operation in IndiaDokument12 Seiten4.power Systems & Synchronous Motor Operation in IndiachethanNoch keine Bewertungen
- 2.effect of Variation of Load P.F. On Synchronous MachineDokument13 Seiten2.effect of Variation of Load P.F. On Synchronous MachinechethanNoch keine Bewertungen
- 1.synchronous MachinesDokument13 Seiten1.synchronous MachineschethanNoch keine Bewertungen
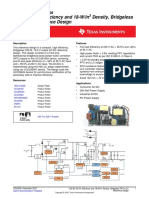
- Tiduef8 PDFDokument23 SeitenTiduef8 PDFchethanNoch keine Bewertungen
- Radio Frequency DC-DC Power Conversion PDFDokument204 SeitenRadio Frequency DC-DC Power Conversion PDFchethanNoch keine Bewertungen
- Solar PV SystemsDokument21 SeitenSolar PV SystemschethanNoch keine Bewertungen
- Basic Data Mining Techniques: AttributesDokument12 SeitenBasic Data Mining Techniques: AttributeschethanNoch keine Bewertungen
- Model Predictive ControlDokument49 SeitenModel Predictive ControlchethanNoch keine Bewertungen
- Solar Water PumpingDokument16 SeitenSolar Water Pumpingchethan50% (2)
- Nanosolar PowersheetDokument18 SeitenNanosolar PowersheetchethanNoch keine Bewertungen
- Anupam Vinay Surin 12PS05F P & Es, NitkDokument20 SeitenAnupam Vinay Surin 12PS05F P & Es, NitkchethanNoch keine Bewertungen
- Solution Manual For Physics With Mastering Physics 4 e 4th Edition James S WalkerDokument52 SeitenSolution Manual For Physics With Mastering Physics 4 e 4th Edition James S WalkerThomasStoutqpoa100% (40)
- Stucor Me8594-WoDokument118 SeitenStucor Me8594-WoSathiez SathishNoch keine Bewertungen
- Ph3151 All 5 Chapter NotesDokument108 SeitenPh3151 All 5 Chapter NotesGowtham KumarasamyNoch keine Bewertungen
- Engineering Mechanics Statics - Meriam and Kraige (6th Ed)Dokument6 SeitenEngineering Mechanics Statics - Meriam and Kraige (6th Ed)iamsods20% (10)
- DC Motor HandoutDokument7 SeitenDC Motor HandoutMounir BouzguendaNoch keine Bewertungen
- Brakes Design Report: Objective - The Brakes Are One of The Most Important Safety Systems On The Vehicle. The CarDokument17 SeitenBrakes Design Report: Objective - The Brakes Are One of The Most Important Safety Systems On The Vehicle. The CarTavi SharmaNoch keine Bewertungen
- Fundamentals of Mechanics of Rigid BodiesDokument28 SeitenFundamentals of Mechanics of Rigid BodiesEhreenNoch keine Bewertungen
- Catalog Reductor Armonic Cu RulmentiDokument20 SeitenCatalog Reductor Armonic Cu RulmentiAkeidirNoch keine Bewertungen
- 7 - Circular Motion and RotationDokument38 Seiten7 - Circular Motion and RotationImran SitompulNoch keine Bewertungen
- Rotational Equilibrium and Rotational DynamicsDokument12 SeitenRotational Equilibrium and Rotational DynamicsCG AmonNoch keine Bewertungen
- 2004 9000 0A 0740 - CPP Crane Maintenance Guideline - Rev1Dokument67 Seiten2004 9000 0A 0740 - CPP Crane Maintenance Guideline - Rev1chuminhNoch keine Bewertungen
- Design of ShaftDokument8 SeitenDesign of ShaftPavan BabhaleNoch keine Bewertungen
- A320 - Ata 70 - b1 - Iae v2500 Standard Practices EngineDokument28 SeitenA320 - Ata 70 - b1 - Iae v2500 Standard Practices EngineOmair Aziz Rabbani100% (2)
- Haogl: Alimer, A MeterDokument8 SeitenHaogl: Alimer, A MeterMuhmmad AhmadNoch keine Bewertungen
- LXM23D and BCH Servo Drive System Product ManualDokument403 SeitenLXM23D and BCH Servo Drive System Product ManualLau Yuk LunNoch keine Bewertungen
- SM 11 Physics Eng 201617 PDFDokument325 SeitenSM 11 Physics Eng 201617 PDFNiranjan kumarNoch keine Bewertungen
- Module of Analytic MechanicsDokument32 SeitenModule of Analytic MechanicsMirza MueidNoch keine Bewertungen
- Forces, Density and Pressure.Dokument6 SeitenForces, Density and Pressure.golden crownNoch keine Bewertungen
- MOTOARE SEM-MT - Technical - Data - Manual PDFDokument65 SeitenMOTOARE SEM-MT - Technical - Data - Manual PDFalexandrubuduNoch keine Bewertungen
- Scissors MomentsDokument9 SeitenScissors Momentsteng fsNoch keine Bewertungen
- Experiment 2Dokument11 SeitenExperiment 2Zoe FormosoNoch keine Bewertungen
- Torsion ProblemsDokument7 SeitenTorsion ProblemsLouie G NavaltaNoch keine Bewertungen
- D412-750 160118Dokument17 SeitenD412-750 160118GhribiNoch keine Bewertungen
- Simulation of Simple PendulumDokument6 SeitenSimulation of Simple PenduluminventionjournalsNoch keine Bewertungen
- DDW4IlQrLfHnelPSkPZQ (Original)Dokument16 SeitenDDW4IlQrLfHnelPSkPZQ (Original)Surendra singhNoch keine Bewertungen
- Technical Guide No. 8: Electrical BrakingDokument30 SeitenTechnical Guide No. 8: Electrical BrakingKnjigescribdNoch keine Bewertungen
- Tractive EffortDokument11 SeitenTractive EffortSelva KumarNoch keine Bewertungen
- Robot Arm TutorialDokument16 SeitenRobot Arm Tutorialjulfo05100% (1)
- P 1485 BG - 700 Series Double Reduction Worm Gear PDFDokument36 SeitenP 1485 BG - 700 Series Double Reduction Worm Gear PDFSabyasachi BasuNoch keine Bewertungen
- Electromagnetic PropulsionDokument9 SeitenElectromagnetic Propulsionpras_scribdNoch keine Bewertungen