Das könnte Ihnen auch gefallen
- EsquemaDokument1 SeiteEsquemaCarito MlNoch keine Bewertungen
- 4º Cálculo VectorialDokument17 Seiten4º Cálculo VectorialAlberto RayoNoch keine Bewertungen
- EsquemaDokument1 SeiteEsquemaCarito MlNoch keine Bewertungen
- Cartilla de Descripción de Rocas Sedimentarias No Clásticas: 1. Características MacroscópicasDokument1 SeiteCartilla de Descripción de Rocas Sedimentarias No Clásticas: 1. Características MacroscópicasCarito MlNoch keine Bewertungen
- Cartilla de Descripción de Rocas Metamorficas: Nombres: Mamani Luque J. Carolina CODIGO: 130328 Semestre: V FechaDokument2 SeitenCartilla de Descripción de Rocas Metamorficas: Nombres: Mamani Luque J. Carolina CODIGO: 130328 Semestre: V FechaCarito MlNoch keine Bewertungen
- Cartilla de Descripción de Rocas Sedimentarias No ClásticasDokument2 SeitenCartilla de Descripción de Rocas Sedimentarias No ClásticasCarito MlNoch keine Bewertungen
- Sedimentologia 1Dokument43 SeitenSedimentologia 1kelrzNoch keine Bewertungen
- Depósitos CuaternariosDokument2 SeitenDepósitos CuaternariosGerson Asbel Ramos Cardenas50% (2)
- Dónde Comienza El Amor y Terminan Las Lagrimas SignedDokument6 SeitenDónde Comienza El Amor y Terminan Las Lagrimas SignedCarito MlNoch keine Bewertungen
- SDokument13 SeitenSCarito MlNoch keine Bewertungen
- Croqu GeomorfologicoDokument21 SeitenCroqu GeomorfologicoCarito MlNoch keine Bewertungen
- Presentacion Del Curso (3) - 1Dokument5 SeitenPresentacion Del Curso (3) - 1Alejandro Lopez RamirezNoch keine Bewertungen
- Dónde Comienza El Amor y Terminan Las Lagrimas SignedDokument6 SeitenDónde Comienza El Amor y Terminan Las Lagrimas SignedCarito MlNoch keine Bewertungen
- Mejoramiento Genetico VegetalDokument10 SeitenMejoramiento Genetico VegetalIrinaNoch keine Bewertungen
- Dia 1 Encuentro Instructores BPR R290 CAIR 2022Dokument53 SeitenDia 1 Encuentro Instructores BPR R290 CAIR 2022Andrés HernándezNoch keine Bewertungen
- Exposición MagistralDokument7 SeitenExposición MagistralChaly Eduardo TerrazasNoch keine Bewertungen
- Flujo Uniforme.Dokument55 SeitenFlujo Uniforme.HenryNoch keine Bewertungen
- ¿Cómo Modular La Voz para Lograr Una Comunicación EficienteDokument16 Seiten¿Cómo Modular La Voz para Lograr Una Comunicación EficienteEVELYN JIMENEZNoch keine Bewertungen
- Responde A Conceptos de Psicología.Dokument20 SeitenResponde A Conceptos de Psicología.Petter Dipiton MateoNoch keine Bewertungen
- EVALUACIONES m8Dokument37 SeitenEVALUACIONES m8danny alejandro carrillo longas100% (6)
- Actividades Alumno Enero 2Dokument12 SeitenActividades Alumno Enero 2MaggieGMNoch keine Bewertungen
- Palangre de PescaDokument10 SeitenPalangre de PescaMaribi Cruz OrtegaNoch keine Bewertungen
- Ficha de Trabajo 11Dokument5 SeitenFicha de Trabajo 11Diego PortalNoch keine Bewertungen
- Informe EMPRENDIMIENTODokument10 SeitenInforme EMPRENDIMIENTOEstuardo PerézNoch keine Bewertungen
- Evaluacion Del Poder Fertilizante de Dos Abonos Organicos Preparados Con em en Plantas de Tomate by Gutierrez Et AlDokument7 SeitenEvaluacion Del Poder Fertilizante de Dos Abonos Organicos Preparados Con em en Plantas de Tomate by Gutierrez Et AlLuis EduardoNoch keine Bewertungen
- Ejercicios CondicionalesDokument4 SeitenEjercicios CondicionalesIvan PS100% (1)
- Boletín y Elegía de Las MitasDokument3 SeitenBoletín y Elegía de Las MitasSebastián Taya50% (2)
- 8 Biol 5 SM T1 2022-220316-131336Dokument92 Seiten8 Biol 5 SM T1 2022-220316-131336Earlyna Espinoza CuevaNoch keine Bewertungen
- Clase 3 - Zocalos y ContrazocalosDokument14 SeitenClase 3 - Zocalos y ContrazocalosAnthony Contreras MontesNoch keine Bewertungen
- pdf-12 en EsDokument8 Seitenpdf-12 en EsSamuel AlvarezNoch keine Bewertungen
- PDF 2dogrado ComputacionDokument98 SeitenPDF 2dogrado ComputacionHilder Lozada VasquezNoch keine Bewertungen
- Planilla SoldaduraDokument6 SeitenPlanilla SoldaduraEsteban AballayNoch keine Bewertungen
- Prueba 3 Control de CalidadDokument1 SeitePrueba 3 Control de CalidadKaterine Ortega RiañoNoch keine Bewertungen
- La Era CenozoicaDokument6 SeitenLa Era CenozoicaGabyNaranjoNoch keine Bewertungen
- Actividad IntegradoraDokument5 SeitenActividad IntegradoraSantiago MontoyaJimnezNoch keine Bewertungen
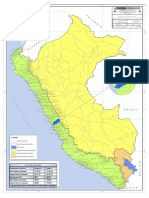
- 01 Mapa Ubicacion de La Cuenca Chancay - Huaral PDFDokument1 Seite01 Mapa Ubicacion de La Cuenca Chancay - Huaral PDFQC LuisNoch keine Bewertungen
- Fundamentos Ontológicos de La RSEDokument8 SeitenFundamentos Ontológicos de La RSEMarìa Ermila Pèrez100% (1)
- Von Sprecher - Teorías Sociológicas. Introducción A Los ClásicosDokument40 SeitenVon Sprecher - Teorías Sociológicas. Introducción A Los ClásicosBarbi BNoch keine Bewertungen
- Fuerza Core PDFDokument6 SeitenFuerza Core PDFmonilbeNoch keine Bewertungen
- ORD - COMUNICACIÓN Práctica y PreguntasDokument8 SeitenORD - COMUNICACIÓN Práctica y PreguntasFlor sunilda Condori floresNoch keine Bewertungen
- Capitulo 28 PayriDokument7 SeitenCapitulo 28 PayriMauricio Apaza AguirreNoch keine Bewertungen
- EVANSDokument21 SeitenEVANS46697451Noch keine Bewertungen
- Uso de Enzimas en La IndustriaDokument2 SeitenUso de Enzimas en La Industriamanu_alfonsoNoch keine Bewertungen
- Conciencia del tiempo: Por qué pensar como geólogos puede ayudarnos a salvar el planetaVon EverandConciencia del tiempo: Por qué pensar como geólogos puede ayudarnos a salvar el planetaBewertung: 4.5 von 5 Sternen4.5/5 (2)
- Técnicas de caracterización y procedimientos empleados en la mineralogía aplicada al beneficio de mineralesVon EverandTécnicas de caracterización y procedimientos empleados en la mineralogía aplicada al beneficio de mineralesBewertung: 5 von 5 Sternen5/5 (1)
- Diseño, construcción y pruebas de horno prototipo semicontinuo para producir cerámicaVon EverandDiseño, construcción y pruebas de horno prototipo semicontinuo para producir cerámicaNoch keine Bewertungen
- Cambio climático: Lecciones de y para ciudades de América LatinaVon EverandCambio climático: Lecciones de y para ciudades de América LatinaBewertung: 4 von 5 Sternen4/5 (2)
- Desastres y emergencias. Prevención, mitigación y preparaciónVon EverandDesastres y emergencias. Prevención, mitigación y preparaciónBewertung: 4 von 5 Sternen4/5 (5)
- Gestión ambiental y desarrollo sostenibleVon EverandGestión ambiental y desarrollo sostenibleBewertung: 3.5 von 5 Sternen3.5/5 (2)
- Química para geología: Aplicación en laboratorio y campoVon EverandQuímica para geología: Aplicación en laboratorio y campoBewertung: 4.5 von 5 Sternen4.5/5 (10)
- Manual de hidrología para obras viales basado en el uso de sistemas de información geográfica.Von EverandManual de hidrología para obras viales basado en el uso de sistemas de información geográfica.Bewertung: 5 von 5 Sternen5/5 (2)
- Potabilización del agua: Principios de diseño, control de procesos y laboratorioVon EverandPotabilización del agua: Principios de diseño, control de procesos y laboratorioBewertung: 4 von 5 Sternen4/5 (29)
- Aguas subterráneas en zonas de montaña y trazadores ambientalesVon EverandAguas subterráneas en zonas de montaña y trazadores ambientalesBewertung: 5 von 5 Sternen5/5 (1)
- Guía práctica para implementar la economía circular en las pymesVon EverandGuía práctica para implementar la economía circular en las pymesBewertung: 5 von 5 Sternen5/5 (1)
- Clima, hidrología y meteorología: Para ciencias ambientales e ingenieríaVon EverandClima, hidrología y meteorología: Para ciencias ambientales e ingenieríaBewertung: 5 von 5 Sternen5/5 (2)
- Diseño urbano bioclimático: Modelado y simulación digitalVon EverandDiseño urbano bioclimático: Modelado y simulación digitalNoch keine Bewertungen
- Cosecha de agua y tierra: Diseño con permacultura y línea claveVon EverandCosecha de agua y tierra: Diseño con permacultura y línea claveBewertung: 3 von 5 Sternen3/5 (2)