Das könnte Ihnen auch gefallen
- Omron SYSMAC-C Series: Bit DeviceDokument6 SeitenOmron SYSMAC-C Series: Bit DeviceJeydson StorchNoch keine Bewertungen
- ARM PracticeExamProblemsDokument3 SeitenARM PracticeExamProblemspvdaiNoch keine Bewertungen
- Dell Inspiron 1525 Schematic DiagramDokument47 SeitenDell Inspiron 1525 Schematic Diagramogon601100% (2)
- Commands For Operations, Maintenance, and Troubleshooting: ACK-ALM-Acknowledge AlarmDokument86 SeitenCommands For Operations, Maintenance, and Troubleshooting: ACK-ALM-Acknowledge Alarmbala097Noch keine Bewertungen
- Asus - A3e - R2.2 Schematic PDFDokument51 SeitenAsus - A3e - R2.2 Schematic PDFvideosonNoch keine Bewertungen
- Lab AshDokument5 SeitenLab AshMuhd DeenNoch keine Bewertungen
- Option Dvb-S2 Sat Receiver: QG924.400.030 Rev. ADokument10 SeitenOption Dvb-S2 Sat Receiver: QG924.400.030 Rev. AFathur Rachman KoesnandarNoch keine Bewertungen
- ATmega8 SHT71 Temperature Humidity and Dew Point ExampleDokument9 SeitenATmega8 SHT71 Temperature Humidity and Dew Point Examplehieuhuech1Noch keine Bewertungen
- CY8 C95 X 0 ADokument32 SeitenCY8 C95 X 0 AAnonymous 60esBJZIj100% (1)
- Atmega 328 PDokument344 SeitenAtmega 328 PAlexandre100% (1)
- BC04Dokument21 SeitenBC04HFGEMINISNoch keine Bewertungen
- Acer Aspire 8730Dokument51 SeitenAcer Aspire 8730Sadun CaymazNoch keine Bewertungen
- Acer Aspire 5738Dokument61 SeitenAcer Aspire 5738Ariox VitriolNoch keine Bewertungen
- MSP 430 F 5336Dokument104 SeitenMSP 430 F 5336teomondoNoch keine Bewertungen
- STM32 RC Car (Android Control Via Bluetooth)Dokument9 SeitenSTM32 RC Car (Android Control Via Bluetooth)winNoch keine Bewertungen
- M 168Dokument376 SeitenM 168long_address_shortNoch keine Bewertungen
- Emachines CircuitoDokument51 SeitenEmachines CircuitoaCoeKwTFNoch keine Bewertungen
- 80 C 535Dokument56 Seiten80 C 535MÜhammadFIkriNoch keine Bewertungen
- Atmel 11121S 32 Bit Cortex A5 Microcontroller SAMA5D3 Summary DatasheetDokument22 SeitenAtmel 11121S 32 Bit Cortex A5 Microcontroller SAMA5D3 Summary DatasheetbibloiNoch keine Bewertungen
- REM54 ParlistENcDokument158 SeitenREM54 ParlistENcSarah FrazierNoch keine Bewertungen
- Asus Eee PC 701Dokument47 SeitenAsus Eee PC 701Rosangela MariaNoch keine Bewertungen
- 8050QRDokument121 Seiten8050QRcjarekNoch keine Bewertungen
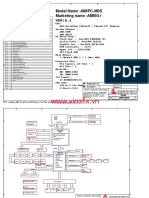
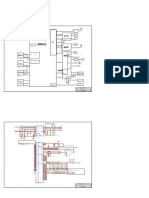
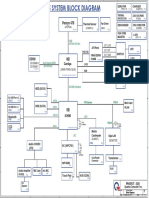
- Biostar A88pc-M3s SchematicDokument43 SeitenBiostar A88pc-M3s SchematicDhe KencoesNoch keine Bewertungen
- TimersDokument51 SeitenTimersSaravanan T YNoch keine Bewertungen
- DX DiagDokument24 SeitenDX DiagFathur RachmansyahNoch keine Bewertungen
- Part 3Dokument27 SeitenPart 3Ogunranti RasaqNoch keine Bewertungen
- Ewsd v16Dokument89 SeitenEwsd v16Eugen BleulerNoch keine Bewertungen
- P2S SchematicsDokument17 SeitenP2S SchematicsAsraful SardarNoch keine Bewertungen
- Configuracion ME4012Dokument7 SeitenConfiguracion ME4012haflores2512Noch keine Bewertungen
- Atmel 11121 32 Bit Cortex A5 Microcontroller SAMA5D3 DatasheetDokument1.817 SeitenAtmel 11121 32 Bit Cortex A5 Microcontroller SAMA5D3 DatasheetfabioakioNoch keine Bewertungen
- Lab 06-Application and Understanding of Analog To Digital Conversion (A/D)Dokument6 SeitenLab 06-Application and Understanding of Analog To Digital Conversion (A/D)Nida AliNoch keine Bewertungen
- Asus F6ve Rev 1.0 SCHDokument64 SeitenAsus F6ve Rev 1.0 SCHВиола БорисовскаяNoch keine Bewertungen
- CS609 - Midterm Solved Subjective With References by Moaaz PDFDokument7 SeitenCS609 - Midterm Solved Subjective With References by Moaaz PDFHaris Sohail100% (1)
- SC200 Datasheet HDokument8 SeitenSC200 Datasheet HNafier RahmanthaNoch keine Bewertungen
- Samsung Np-r425 Suzhou-D Rev1.0 Amd Caspin Suzhou-DDokument57 SeitenSamsung Np-r425 Suzhou-D Rev1.0 Amd Caspin Suzhou-Dsuhermanto1Noch keine Bewertungen
- Terminal Content 1686279044780Dokument3 SeitenTerminal Content 1686279044780jhon henrri garcera garcesNoch keine Bewertungen
- Lenovo - 20S10 - QUANTA FL2 - REV 1ASec PDFDokument36 SeitenLenovo - 20S10 - QUANTA FL2 - REV 1ASec PDFCesar AugustoNoch keine Bewertungen
- FS-8700-64 ATMI ACM: Driver ManualDokument22 SeitenFS-8700-64 ATMI ACM: Driver ManualEric DunnNoch keine Bewertungen
- Acer SchematicsDokument48 SeitenAcer Schematicsadyxyy1Noch keine Bewertungen
- 3 Program CodeDokument15 Seiten3 Program Codergkusumba100% (1)
- TMS320F2812 - Digital I/ODokument30 SeitenTMS320F2812 - Digital I/OPantech ProLabs India Pvt LtdNoch keine Bewertungen
- Acer Aspire 4733z Quanta - ZQ5 - RevBDokument45 SeitenAcer Aspire 4733z Quanta - ZQ5 - RevBFranco ZuritaNoch keine Bewertungen
- Show MacDokument3 SeitenShow MacphuctnhNoch keine Bewertungen
- ATM Pocket Guide: For Your ATM Testing Needs Call 800.TEKELEC Visit Our Web Site atDokument14 SeitenATM Pocket Guide: For Your ATM Testing Needs Call 800.TEKELEC Visit Our Web Site athemusairamNoch keine Bewertungen
- Emachines D725Dokument51 SeitenEmachines D725Николай ШадринNoch keine Bewertungen
- Datasheet Atmega 161 PDokument159 SeitenDatasheet Atmega 161 PprincebahariNoch keine Bewertungen
- Advanced Raspberry Pi: Raspbian Linux and GPIO IntegrationVon EverandAdvanced Raspberry Pi: Raspbian Linux and GPIO IntegrationNoch keine Bewertungen
- Offshore Electrical Engineering ManualVon EverandOffshore Electrical Engineering ManualBewertung: 4 von 5 Sternen4/5 (9)
- C Programming for the Pc the Mac and the Arduino Microcontroller SystemVon EverandC Programming for the Pc the Mac and the Arduino Microcontroller SystemNoch keine Bewertungen
- ARM Microcontrollers Programming for Embedded SystemsVon EverandARM Microcontrollers Programming for Embedded SystemsBewertung: 5 von 5 Sternen5/5 (1)
- Digital Signal Processing Using the ARM Cortex M4Von EverandDigital Signal Processing Using the ARM Cortex M4Bewertung: 1 von 5 Sternen1/5 (1)
- Power Systems-On-Chip: Practical Aspects of DesignVon EverandPower Systems-On-Chip: Practical Aspects of DesignBruno AllardNoch keine Bewertungen
- Microprocessor Architectures and Systems: RISC, CISC and DSPVon EverandMicroprocessor Architectures and Systems: RISC, CISC and DSPBewertung: 4 von 5 Sternen4/5 (1)
- 1 Knreddy: Programming in C & Data StructuresDokument14 Seiten1 Knreddy: Programming in C & Data StructuresGsp KhadyothNoch keine Bewertungen
- C by PavanDokument34 SeitenC by PavanMaddu PavanNoch keine Bewertungen
- 34355-02 Teaching TurtlesDokument6 Seiten34355-02 Teaching TurtlesjscansinoNoch keine Bewertungen
- Qbasic Tutorial For Beginners and NewbiesDokument23 SeitenQbasic Tutorial For Beginners and NewbiesBay BunkerNoch keine Bewertungen
- Rexx 1Dokument115 SeitenRexx 1Deepak Dada100% (1)
- Lecture Looping and Machine Problem 3Dokument5 SeitenLecture Looping and Machine Problem 3MarkNoch keine Bewertungen
- Ugc Net SolvedDokument39 SeitenUgc Net SolvedRongeet SodhiNoch keine Bewertungen
- Oops and C++ NotesDokument148 SeitenOops and C++ NotesKARUNA RANANoch keine Bewertungen
- 2 Python Control StructuresDokument39 Seiten2 Python Control StructuresArya BhattNoch keine Bewertungen
- Python Environment Setup and EssentialsDokument54 SeitenPython Environment Setup and Essentialsaditya kshirsagarNoch keine Bewertungen
- Introducing Switch Statement and For Loop: Java ProgrammingDokument22 SeitenIntroducing Switch Statement and For Loop: Java ProgrammingskyyyeisthebestNoch keine Bewertungen
- CS Paper 1Dokument4 SeitenCS Paper 1AaravNoch keine Bewertungen
- Simple Labs Induino R3 Arduino Compatible Board - User GuideDokument26 SeitenSimple Labs Induino R3 Arduino Compatible Board - User GuideKalaignan Rajesh100% (1)
- PresentCh03 - Decision and Repetition StatementsDokument16 SeitenPresentCh03 - Decision and Repetition StatementsGebreigziabher M. AbNoch keine Bewertungen
- Dept & Sem: Subject Name: Course Code: Unit: Prepared byDokument75 SeitenDept & Sem: Subject Name: Course Code: Unit: Prepared by474 likithkumarreddy1Noch keine Bewertungen
- Mcs 31Dokument324 SeitenMcs 31Sonali GhanwatNoch keine Bewertungen
- ClassVIII Coding Student HandbookDokument69 SeitenClassVIII Coding Student HandbookmananNoch keine Bewertungen
- GE19141 PUC Unit 3 LN 2019Dokument28 SeitenGE19141 PUC Unit 3 LN 2019SURIYA M SEC 2020Noch keine Bewertungen
- Manual Rice Lake Rev EDokument104 SeitenManual Rice Lake Rev Eabocanegrab12Noch keine Bewertungen
- CIE Pseudocode GuideDokument11 SeitenCIE Pseudocode GuideAaron Abdur RahimNoch keine Bewertungen
- CworkbookDokument77 SeitenCworkbookSonit KumarNoch keine Bewertungen
- Flow Control by Durga SirDokument53 SeitenFlow Control by Durga SirLalitNoch keine Bewertungen
- C#.Net Full NotesDokument63 SeitenC#.Net Full NotesSai DeepakNoch keine Bewertungen
- SIMATIC - Programming Guide S7-1200 and 1500 (3 - 2017)Dokument120 SeitenSIMATIC - Programming Guide S7-1200 and 1500 (3 - 2017)Jorge_Andril_5370100% (3)
- Crescent Mock Test Question 1Dokument40 SeitenCrescent Mock Test Question 1Magesh ManiNoch keine Bewertungen
- Competitive C ProgramsDokument36 SeitenCompetitive C ProgramsNAYAN SHIVAMNoch keine Bewertungen
- Prog PDFDokument47 SeitenProg PDFJohnkenneth DolleteNoch keine Bewertungen
- Lecture 4-Conditional and Loops-V2Dokument22 SeitenLecture 4-Conditional and Loops-V2Bezalel OwusuNoch keine Bewertungen
- Ebook Ebook PDF Starting Out With Java From Control Structures Through Objects 7th Edition PDFDokument42 SeitenEbook Ebook PDF Starting Out With Java From Control Structures Through Objects 7th Edition PDFeleanor.yazzie302100% (36)
- Question Bank-Problem Solving and Python ProgramDokument13 SeitenQuestion Bank-Problem Solving and Python ProgramSREEJITH S NAIRNoch keine Bewertungen