Das könnte Ihnen auch gefallen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Cyberbullying BrochureDokument2 SeitenCyberbullying Brochureapi-614083099Noch keine Bewertungen
- CAPM Exam Prep WorkbookDokument50 SeitenCAPM Exam Prep WorkbookMohammad Jaradeh100% (5)
- MP6000 PC v00Dokument262 SeitenMP6000 PC v00Marcio York Cardoso100% (1)
- Project ReportDokument50 SeitenProject ReportKshitija Rai100% (1)
- Nursing InformaticsDokument43 SeitenNursing Informaticstummalapalli venkateswara rao67% (3)
- General Science & Ability - Past Papers AnalysisDokument22 SeitenGeneral Science & Ability - Past Papers AnalysisAmeena AimenNoch keine Bewertungen
- Letter of MotivationDokument1 SeiteLetter of Motivationhafiz muhammad zubair hafiz muhammad zubairNoch keine Bewertungen
- New Features Marvelous Designer 4Dokument45 SeitenNew Features Marvelous Designer 4tiff4ne1100% (1)
- Vapor ExplosionDokument40 SeitenVapor Explosionyellowchickenhead3247Noch keine Bewertungen
- Chemical Rocket HazardDokument250 SeitenChemical Rocket Hazardyellowchickenhead3247Noch keine Bewertungen
- CEBAM HE Blast ModelingDokument4 SeitenCEBAM HE Blast Modelingyellowchickenhead3247Noch keine Bewertungen
- Endnote x7 Kor 4Dokument35 SeitenEndnote x7 Kor 4yellowchickenhead3247Noch keine Bewertungen
- Cea PDFDokument19 SeitenCea PDFyellowchickenhead3247Noch keine Bewertungen
- 2009 Oct 24 NASA Ames PresentationDokument61 Seiten2009 Oct 24 NASA Ames Presentationyellowchickenhead3247Noch keine Bewertungen
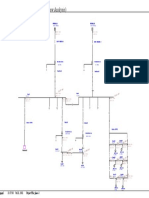
- One-Line Diagram - OLV1 (Load Flow Analysis) : 33.0 7 KV 33.0 7 KV 33.0 7 KV 33.0 7 KVDokument1 SeiteOne-Line Diagram - OLV1 (Load Flow Analysis) : 33.0 7 KV 33.0 7 KV 33.0 7 KV 33.0 7 KVhaiderNoch keine Bewertungen
- 3.4.4 Lab - Research Networking StandardsDokument5 Seiten3.4.4 Lab - Research Networking StandardsCT KHNoch keine Bewertungen
- ShockLog Essentials v10 4Dokument79 SeitenShockLog Essentials v10 4William Rubio AvilaNoch keine Bewertungen
- Silumin Catalogo Lutec PVP 2021Dokument186 SeitenSilumin Catalogo Lutec PVP 2021VEMATELNoch keine Bewertungen
- OCL TutorialDokument3 SeitenOCL Tutorialshahid_abdullahNoch keine Bewertungen
- របៀប boost post live page without blue verifiesDokument2 Seitenរបៀប boost post live page without blue verifieskeo linNoch keine Bewertungen
- Chart Recorder CertificateDokument2 SeitenChart Recorder CertificateShwanNoch keine Bewertungen
- Energies 12 00446Dokument35 SeitenEnergies 12 00446Vimal SamNoch keine Bewertungen
- SX44Dokument4 SeitenSX44Mk MakyNoch keine Bewertungen
- CAA66 ManualDokument52 SeitenCAA66 Manualferna2420Noch keine Bewertungen
- Edited - Grade 9 - Q4 W1 4 TECDokument14 SeitenEdited - Grade 9 - Q4 W1 4 TECNatch LomeeNoch keine Bewertungen
- Check-Uy, Margarita Luisa S.Dokument6 SeitenCheck-Uy, Margarita Luisa S.Marco UyNoch keine Bewertungen
- Hoewerkthet EngelsDokument10 SeitenHoewerkthet EngelsLubna SubhanNoch keine Bewertungen
- Java Code Examples Org - Springframework.batch - Core.launch - Joblauncher.runDokument12 SeitenJava Code Examples Org - Springframework.batch - Core.launch - Joblauncher.runBala KulandaiNoch keine Bewertungen
- 00 IntroductionDokument4 Seiten00 Introductionv_doina20023873Noch keine Bewertungen
- Downloads Pqsine S 1 16 16Dokument1 SeiteDownloads Pqsine S 1 16 16SANDRO RAUL HUAMANI PIZARRONoch keine Bewertungen
- OpenFiler Vs FreeNASDokument5 SeitenOpenFiler Vs FreeNASSyed Atif Ali100% (34)
- Pa MetricsDokument23 SeitenPa MetricsMatt LambieNoch keine Bewertungen
- Eco Exercise 3answer Ans 1Dokument8 SeitenEco Exercise 3answer Ans 1Glory PrintingNoch keine Bewertungen
- Amplify Alarms, Wakelocks and ServicesDokument40 SeitenAmplify Alarms, Wakelocks and Servicesdejvi123100% (1)
- Sony SLV Ex5 Ex8s Ex9sDokument71 SeitenSony SLV Ex5 Ex8s Ex9svideoson100% (1)
- TMA4215 Report (10056,10047,10023)Dokument5 SeitenTMA4215 Report (10056,10047,10023)EvacuolNoch keine Bewertungen