Das könnte Ihnen auch gefallen
- 3.5.2 Two Envelope System Inguillo and ZoletsDokument1 Seite3.5.2 Two Envelope System Inguillo and ZoletsXyrile ß IngilloNoch keine Bewertungen
- Module-1 Home-Eval 1Dokument9 SeitenModule-1 Home-Eval 1Michael James ll BanawisNoch keine Bewertungen
- Water Resources Engineering 3rd Edition Chin Solutions ManualDokument15 SeitenWater Resources Engineering 3rd Edition Chin Solutions Manualhutaq0% (1)
- UC Test Determines Clay StrengthDokument13 SeitenUC Test Determines Clay StrengthMuhammad LutfiNoch keine Bewertungen
- Refresher (Probability Discussion)Dokument33 SeitenRefresher (Probability Discussion)sadonNoch keine Bewertungen
- Flow Through An OrificeDokument8 SeitenFlow Through An OrificeKevin VillaNoch keine Bewertungen
- Lab 11Dokument4 SeitenLab 11IM AM THE ONENoch keine Bewertungen
- Physical Characteristics of Soils ExplainedDokument34 SeitenPhysical Characteristics of Soils ExplainedVijaykumar NagnaikNoch keine Bewertungen
- A NoteDokument106 SeitenA NoteKenneth SantiagoNoch keine Bewertungen
- Subject 1 Algebra Trigonometry Plane Geometry Solid Geometry Analytic Geometry Probability PhysicsDokument49 SeitenSubject 1 Algebra Trigonometry Plane Geometry Solid Geometry Analytic Geometry Probability PhysicsDani LubosNoch keine Bewertungen
- A) Standard Penetration Test (SPT) :: Permission)Dokument23 SeitenA) Standard Penetration Test (SPT) :: Permission)Marcos NoronhaNoch keine Bewertungen
- FoundationDokument43 SeitenFoundationNel PaganaNoch keine Bewertungen
- Geotech1Lab-Laboratory Work No. 2 PDFDokument4 SeitenGeotech1Lab-Laboratory Work No. 2 PDFMarc Carlo IbañezNoch keine Bewertungen
- Cebep Reviewer Set 1Dokument33 SeitenCebep Reviewer Set 1Loysa Agtarap MataNoch keine Bewertungen
- Chapter 02 - Analysis and Design For Axial TensionDokument52 SeitenChapter 02 - Analysis and Design For Axial Tensionyolo louoNoch keine Bewertungen
- Tutorial 1Dokument2 SeitenTutorial 1KenBoonWong100% (1)
- Problem 2 ADokument2 SeitenProblem 2 AJingNoch keine Bewertungen
- DIFFERENTIAL CALCULUS AND APPLICATIONSDokument2 SeitenDIFFERENTIAL CALCULUS AND APPLICATIONSEricson CapuaNoch keine Bewertungen
- 7 Osborne Reynold'S Demonstration: Mapúa UniversityDokument11 Seiten7 Osborne Reynold'S Demonstration: Mapúa UniversityJemuel FloresNoch keine Bewertungen
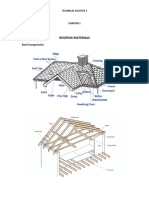
- Roofing Materials: Roof ComponentsDokument17 SeitenRoofing Materials: Roof ComponentsMero Mero100% (1)
- PERMEABILITYDokument26 SeitenPERMEABILITYChristian Felix MapilesNoch keine Bewertungen
- PPSDokument94 SeitenPPSaamirNoch keine Bewertungen
- Particle Size Distribution AnalysisDokument5 SeitenParticle Size Distribution AnalysisNely ZulfatnNoch keine Bewertungen
- Stress at Soil Mass PDFDokument41 SeitenStress at Soil Mass PDFAditya WahidNoch keine Bewertungen
- Review of Related LiteratureDokument7 SeitenReview of Related LiteratureRogelio MordenoNoch keine Bewertungen
- Reinforced Concrete Design, 7th Edition - Sample PagesDokument10 SeitenReinforced Concrete Design, 7th Edition - Sample Pagesboss trisha100% (3)
- Problem Set Soil Mechanics Ready To Print CE PaperDokument6 SeitenProblem Set Soil Mechanics Ready To Print CE PaperClein BaltazarNoch keine Bewertungen
- Comprehensive Exam - Mste (Solve Again)Dokument3 SeitenComprehensive Exam - Mste (Solve Again)Ag OribianaNoch keine Bewertungen
- Flexural Analysis of BeamsDokument50 SeitenFlexural Analysis of BeamsIsmail FarajpourNoch keine Bewertungen
- MyNotes Column BreslerEquationDokument5 SeitenMyNotes Column BreslerEquationGladies Mhay Binay SandovalNoch keine Bewertungen
- CE19A Transportation Engineering Trip AnalysisDokument3 SeitenCE19A Transportation Engineering Trip AnalysisFuaad Abdirizak ElmiNoch keine Bewertungen
- Chapter 3b - Analysis of Tension MembersDokument56 SeitenChapter 3b - Analysis of Tension MembersRami DemachkiNoch keine Bewertungen
- Fluid Mechanics ProbsetDokument2 SeitenFluid Mechanics ProbsetJanine ArtigoNoch keine Bewertungen
- Deflection of Beams - NoteDokument12 SeitenDeflection of Beams - NoteJackNoch keine Bewertungen
- 24 Mass Diagram Surveying ManualDokument3 Seiten24 Mass Diagram Surveying ManualNesya Laxmitha100% (1)
- Civil Iii Year 2017-2018Dokument109 SeitenCivil Iii Year 2017-2018Frank JohnNoch keine Bewertungen
- P5 Effective StressDokument28 SeitenP5 Effective StressMiguel TabaNoch keine Bewertungen
- HomeworkDokument17 SeitenHomeworksonusk777Noch keine Bewertungen
- Co78 QuizDokument3 SeitenCo78 QuizEjitNoch keine Bewertungen
- NCESQ 2018 QuestionsDokument3 SeitenNCESQ 2018 QuestionsKhent Alfred B. DerechoNoch keine Bewertungen
- Force Systems Teaching DemoDokument15 SeitenForce Systems Teaching DemoRonwell De LeonNoch keine Bewertungen
- Fluid MechanicsDokument19 SeitenFluid MechanicsJimmy OrajayNoch keine Bewertungen
- Assignment No. 5 Reflection On Virtual Plant Visits - Concrete and Rebars Rehabilitations and Webinar - Tunneling (Tunnel Boring Machine) v.2Dokument1 SeiteAssignment No. 5 Reflection On Virtual Plant Visits - Concrete and Rebars Rehabilitations and Webinar - Tunneling (Tunnel Boring Machine) v.2John Rhey Almojallas BenedictoNoch keine Bewertungen
- Water QuestionsDokument1 SeiteWater QuestionshhhhNoch keine Bewertungen
- Gabion Chapter 2 and 3Dokument10 SeitenGabion Chapter 2 and 3Patrick Ray TanNoch keine Bewertungen
- INSTRUCTIONS: Read The Following Problems and Answer The Questions, Choosing TheDokument15 SeitenINSTRUCTIONS: Read The Following Problems and Answer The Questions, Choosing TheCharis GilbuenaNoch keine Bewertungen
- Gis Located Above B)Dokument10 SeitenGis Located Above B)Apple AterradoNoch keine Bewertungen
- Foundation Engineering: Module 2: Geotechnical Properties of SoilDokument4 SeitenFoundation Engineering: Module 2: Geotechnical Properties of SoilAljon AvilaNoch keine Bewertungen
- Consolidated-Undrained Tri-Axial Test (Cu - Test) : Problem 1Dokument14 SeitenConsolidated-Undrained Tri-Axial Test (Cu - Test) : Problem 1Jemuel FloresNoch keine Bewertungen
- 112Dokument10 Seiten112Memo LyNoch keine Bewertungen
- Masonry Dam Pressure CalculationsDokument3 SeitenMasonry Dam Pressure CalculationsJems Mansueto0% (1)
- HYDRO322 Module 3 - Abstraction Loss (Part 1)Dokument15 SeitenHYDRO322 Module 3 - Abstraction Loss (Part 1)Cyruz HimenezNoch keine Bewertungen
- Tutorial 2Dokument5 SeitenTutorial 2WHfamilyNoch keine Bewertungen
- (POPOV) Advances in Design of Eccentrically Braced FramesDokument13 Seiten(POPOV) Advances in Design of Eccentrically Braced Frameshal9000_mark1Noch keine Bewertungen
- Buckling of Frames Theory of Elastic StabilityDokument10 SeitenBuckling of Frames Theory of Elastic StabilityNaturinda SarahNoch keine Bewertungen
- Dynamics of Lattice MaterialsVon EverandDynamics of Lattice MaterialsA. Srikantha PhaniNoch keine Bewertungen
- Splice Belt DesignDokument9 SeitenSplice Belt DesignriteshsamantrayNoch keine Bewertungen
- Conjugate Beam Method PDFDokument7 SeitenConjugate Beam Method PDFdada100% (1)
- Lec-23 Viga Conjugada PDFDokument7 SeitenLec-23 Viga Conjugada PDFVíctor Hugo Concha OrmeñoNoch keine Bewertungen
- Abaqus Explicit VUMAT For HysteresisDokument5 SeitenAbaqus Explicit VUMAT For HysteresisAnastasios KarahaliosNoch keine Bewertungen
- Supranuclear Control Opf Eye MovementsDokument162 SeitenSupranuclear Control Opf Eye Movementsknowledgeguruos179Noch keine Bewertungen
- KSU Philosophy of Education Course SyllabusDokument12 SeitenKSU Philosophy of Education Course SyllabusmelchieNoch keine Bewertungen
- Persuasive Speaking Techniques and Organization PatternsDokument4 SeitenPersuasive Speaking Techniques and Organization PatternsAaron WilderNoch keine Bewertungen
- Public VersionDokument170 SeitenPublic Versionvalber8Noch keine Bewertungen
- Grade 4 Run On Sentences To Compound Sentences ADokument2 SeitenGrade 4 Run On Sentences To Compound Sentences Anora dilaNoch keine Bewertungen
- Class Remarks For Class X 1Dokument3 SeitenClass Remarks For Class X 1Sreedhara Venkata Ramana KumarNoch keine Bewertungen
- Multiple Menu ModelDokument39 SeitenMultiple Menu Modelapi-281764670Noch keine Bewertungen
- Instrument Music Lesson Plan: KindergartenDokument4 SeitenInstrument Music Lesson Plan: Kindergartenapi-510351548Noch keine Bewertungen
- Milestones in Adhesion - GICDokument9 SeitenMilestones in Adhesion - GICParidhi Garg100% (1)
- 8.progress Report Presentation (Clickbait Detection System)Dokument26 Seiten8.progress Report Presentation (Clickbait Detection System)mehakNoch keine Bewertungen
- SLP Aba 5 2Dokument127 SeitenSLP Aba 5 2oanhsquirrel0% (1)
- Seminar ReportDokument42 SeitenSeminar Reportsammuel john100% (1)
- Data AnalyticsDokument5 SeitenData AnalyticsDrimit GhosalNoch keine Bewertungen
- Mechanical CADD CourseDokument8 SeitenMechanical CADD CourseCadd CentreNoch keine Bewertungen
- Claremont COURIER 4.28.10Dokument24 SeitenClaremont COURIER 4.28.10Claremont CourierNoch keine Bewertungen
- 0511 English As A Second Language: MARK SCHEME For The May/June 2013 SeriesDokument13 Seiten0511 English As A Second Language: MARK SCHEME For The May/June 2013 SeriesEthanNoch keine Bewertungen
- CentreRegisteredList PDFDokument346 SeitenCentreRegisteredList PDFManisha MishraNoch keine Bewertungen
- Guest Speakers Provide Career InsightsDokument4 SeitenGuest Speakers Provide Career InsightsAndrew SeguelNoch keine Bewertungen
- Classroom Evaluation ChecklistDokument3 SeitenClassroom Evaluation ChecklistAngelaLomagdong94% (18)
- Detailed Lesson Plan I. Objectives A. Content StandardDokument5 SeitenDetailed Lesson Plan I. Objectives A. Content StandardGephelyn GordonNoch keine Bewertungen
- Department of Education: Republic of The PhilippinesDokument2 SeitenDepartment of Education: Republic of The PhilippinesEljean LaclacNoch keine Bewertungen
- Cite Some Common TraditionsDokument1 SeiteCite Some Common TraditionsRosemarie Cardona100% (3)
- Module 5 - Gender and The SexDokument15 SeitenModule 5 - Gender and The SexKrishna LiamNoch keine Bewertungen
- Episode 1: The School As A Learning Resource CenterDokument6 SeitenEpisode 1: The School As A Learning Resource CenterJonel BarrugaNoch keine Bewertungen
- Cot2 DLL - 2023Dokument3 SeitenCot2 DLL - 2023Haidi Lopez100% (1)
- SocratesDokument119 SeitenSocratesLeezl Campoamor OlegarioNoch keine Bewertungen
- English Teaching Methods ExamDokument1 SeiteEnglish Teaching Methods ExamNicoleta Maria MoisinNoch keine Bewertungen
- Field in Nursing Resume IreneDokument2 SeitenField in Nursing Resume Ireneirenealcantara100% (2)
- 2005 English Exam Assessment ReportDokument11 Seiten2005 English Exam Assessment Reportpinkangel2868_142411Noch keine Bewertungen
- The Obstructive ObjectDokument13 SeitenThe Obstructive ObjectCarla Santos100% (1)