Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Solutions To Selected Problems-Duda, HartDokument12 SeitenSolutions To Selected Problems-Duda, HartTiep VuHuu67% (3)
- Resources For Rero - Micro Lessons 1 To 10Dokument11 SeitenResources For Rero - Micro Lessons 1 To 10hj waladcute100% (3)
- JP New Poster 2023Dokument1 SeiteJP New Poster 2023JAI PRAKASH KUSHWAHNoch keine Bewertungen
- 03.10.12. Final Syllabus (M.SC Math)Dokument24 Seiten03.10.12. Final Syllabus (M.SC Math)Devil tigerNoch keine Bewertungen
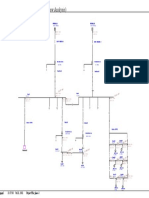
- One-Line Diagram - OLV1 (Load Flow Analysis) : 33.0 7 KV 33.0 7 KV 33.0 7 KV 33.0 7 KVDokument1 SeiteOne-Line Diagram - OLV1 (Load Flow Analysis) : 33.0 7 KV 33.0 7 KV 33.0 7 KV 33.0 7 KVhaiderNoch keine Bewertungen
- AbstractDokument10 SeitenAbstractDyna Lucero LimpiosNoch keine Bewertungen
- Marketing Final Project Blackberry Vs IphoneDokument18 SeitenMarketing Final Project Blackberry Vs IphoneSalman MughalNoch keine Bewertungen
- Brijesh Rai M-9811784242 E Mail: Brijeshrai1977@yahoo - Co.inDokument3 SeitenBrijesh Rai M-9811784242 E Mail: Brijeshrai1977@yahoo - Co.ininderNoch keine Bewertungen
- Accounting Information Systems 7th Edition Hall Test BankDokument14 SeitenAccounting Information Systems 7th Edition Hall Test Bankmisstepmonocarp1b69100% (27)
- Hydro-Probe: Digital Microwave Moisture Sensor For Bins, Silos and ConveyorsDokument4 SeitenHydro-Probe: Digital Microwave Moisture Sensor For Bins, Silos and ConveyorsJulio CaychoNoch keine Bewertungen
- Business Law NMIMSDokument10 SeitenBusiness Law NMIMSprivate lessons0% (1)
- World Link Intro Practice Test Units 10Dokument5 SeitenWorld Link Intro Practice Test Units 10Lumen Christi Mateo BetancesNoch keine Bewertungen
- Form 15: Name of Member 1Dokument2 SeitenForm 15: Name of Member 1FSADFNoch keine Bewertungen
- Mercedes: OUTUBRO/2015Dokument26 SeitenMercedes: OUTUBRO/2015Vitor J. MartinsNoch keine Bewertungen
- Remote Access PolicyDokument4 SeitenRemote Access Policysolobreak05Noch keine Bewertungen
- 2.2 BA ZC426 RTA Apache ZooKeeperDokument24 Seiten2.2 BA ZC426 RTA Apache ZooKeeperPrasanth TarikoppadNoch keine Bewertungen
- Transactions &ConcurrencyControlDokument40 SeitenTransactions &ConcurrencyControlDavid KhadkaNoch keine Bewertungen
- SYS Bolt ManualDokument64 SeitenSYS Bolt ManualNoppolNorasriNoch keine Bewertungen
- Juliet SlidesCarnivalDokument27 SeitenJuliet SlidesCarnivalSarahiH.ReyesNoch keine Bewertungen
- BTC Mining - Google AramaDokument1 SeiteBTC Mining - Google AramaSuli Mrmassb0% (1)
- T2K13 SeedsDokument16 SeitenT2K13 SeedsRyan Thomas100% (8)
- JNTUA B Tech 2018 3 1 Sup R15 ECE 15A04502 Digital Communication SystemsDokument1 SeiteJNTUA B Tech 2018 3 1 Sup R15 ECE 15A04502 Digital Communication SystemsHarsha NerlapalleNoch keine Bewertungen
- Datasheet D7050 B6 Data Sheet enUS 2706872715Dokument2 SeitenDatasheet D7050 B6 Data Sheet enUS 2706872715Waldemar Alvares RezendeNoch keine Bewertungen
- Hathway BillDokument1 SeiteHathway BillSanthoshkumar.Jayaram (CareerNet)Noch keine Bewertungen
- OLA - DPO Review & Clearance - 1678945432Dokument2 SeitenOLA - DPO Review & Clearance - 1678945432Reinier EstrellaNoch keine Bewertungen
- Shortcut Description: Tally ShortcutsDokument3 SeitenShortcut Description: Tally ShortcutsSantosh KuperkarNoch keine Bewertungen
- Alogorithm and DS PG DAC - Aug 19Dokument34 SeitenAlogorithm and DS PG DAC - Aug 19ravi malegaveNoch keine Bewertungen
- Departmental Models 641a UpgradeDokument13 SeitenDepartmental Models 641a UpgradeKrish NarajNoch keine Bewertungen
- Cyberbullying BrochureDokument2 SeitenCyberbullying Brochureapi-614083099Noch keine Bewertungen
- Macro Teste de ResistenciaDokument1 SeiteMacro Teste de ResistenciaFelipe MouraNoch keine Bewertungen