Das könnte Ihnen auch gefallen
- Public Class: Form1Dokument14 SeitenPublic Class: Form1jose luisNoch keine Bewertungen
- Computer Applications Practice Paper ICSE 10thDokument17 SeitenComputer Applications Practice Paper ICSE 10thVignesh Natarajan100% (1)
- C6713 Lab ManualDokument51 SeitenC6713 Lab Manualsmganorkar100% (1)
- Ada Lab FileDokument38 SeitenAda Lab FilePrince J HarshNoch keine Bewertungen
- Chapter 2 Elementary Programming: Class, Public, IntDokument5 SeitenChapter 2 Elementary Programming: Class, Public, IntNoopui KaNoch keine Bewertungen
- Assignment No - 1Dokument11 SeitenAssignment No - 1vermaNoch keine Bewertungen
- Java Basics Batch30Dokument16 SeitenJava Basics Batch30manikanta tarunNoch keine Bewertungen
- BCH CodesDokument11 SeitenBCH CodesAmol AmollNoch keine Bewertungen
- Java Lab RecordDokument37 SeitenJava Lab RecordavinashborigiNoch keine Bewertungen
- Chandran JavaDokument67 SeitenChandran JavaarjuNoch keine Bewertungen
- SomyaRout DistributedSystemsLabFileDokument39 SeitenSomyaRout DistributedSystemsLabFilenrathaur844Noch keine Bewertungen
- PROGRAMDokument73 SeitenPROGRAMMayank KumarNoch keine Bewertungen
- 123Dokument13 Seiten123FY20J1029 Gaurav ShelkeNoch keine Bewertungen
- Computer Science & Engineering Computer Science & EngineeringDokument7 SeitenComputer Science & Engineering Computer Science & Engineeringlostinspace981Noch keine Bewertungen
- ReportDokument35 SeitenReportNeha AdhikariNoch keine Bewertungen
- Abinav APS-fileDokument42 SeitenAbinav APS-fileHemant KumarNoch keine Bewertungen
- Star C ProgramDokument10 SeitenStar C Programshrikant23Noch keine Bewertungen
- Numerical Methods FileDokument25 SeitenNumerical Methods FileAmit Kumar RaiNoch keine Bewertungen
- Lab File-1Dokument46 SeitenLab File-1Hemant KumarNoch keine Bewertungen
- Ada Lab ManualDokument57 SeitenAda Lab ManualNaveen PrabhuNoch keine Bewertungen
- Test 1Dokument5 SeitenTest 1OMKAR JOSHINoch keine Bewertungen
- Experiment No. 09 (DC)Dokument4 SeitenExperiment No. 09 (DC)anooja wadeNoch keine Bewertungen
- A05Dokument3 SeitenA05abhay arNoch keine Bewertungen
- Ap3 1Dokument5 SeitenAp3 1Bad BunnyNoch keine Bewertungen
- JavaDokument17 SeitenJavaSumi Gargi100% (1)
- AMCAT Automata Questions: Program To Check If Two Given Matrices Are Identical in C LanguageDokument36 SeitenAMCAT Automata Questions: Program To Check If Two Given Matrices Are Identical in C LanguageujjwalNoch keine Bewertungen
- Ankit DistributedDokument24 SeitenAnkit DistributedSaurabh GautamNoch keine Bewertungen
- DSLAB22Dokument18 SeitenDSLAB22Vishal SahuNoch keine Bewertungen
- Ada Lab ManualDokument57 SeitenAda Lab ManualManohar NVNoch keine Bewertungen
- MP Sir Sem - II Assignment Power Point PresentationDokument13 SeitenMP Sir Sem - II Assignment Power Point Presentationsumit sahaNoch keine Bewertungen
- SodapdfDokument10 SeitenSodapdfFY20J1029 Gaurav ShelkeNoch keine Bewertungen
- Algorithm Analysis & Design Lab (IT - 354) Practical FileDokument40 SeitenAlgorithm Analysis & Design Lab (IT - 354) Practical Fileakshay kumarNoch keine Bewertungen
- Optimized Programs (17CSL47) : Program 6 (A) 0/1 Knapsack Dynamic ProgrammingDokument22 SeitenOptimized Programs (17CSL47) : Program 6 (A) 0/1 Knapsack Dynamic ProgrammingSuper ManNoch keine Bewertungen
- Tic Tac ToeDokument22 SeitenTic Tac ToeDileep KrNoch keine Bewertungen
- Name:-Roll No: - Class:-: Badugula Rohan Reddy 20009 CSEA / Group-ADokument8 SeitenName:-Roll No: - Class:-: Badugula Rohan Reddy 20009 CSEA / Group-Arohan reddyNoch keine Bewertungen
- Matlab Report File: Amity School of Engineering and TechnologyDokument8 SeitenMatlab Report File: Amity School of Engineering and TechnologySagar WadhwaNoch keine Bewertungen
- Python String Test (CS)Dokument4 SeitenPython String Test (CS)JungjunNoch keine Bewertungen
- Soft Computing Lab UpdatesDokument18 SeitenSoft Computing Lab UpdatesRuDresh DivediNoch keine Bewertungen
- '/content/data - PKL' 'RB': Open PrintDokument5 Seiten'/content/data - PKL' 'RB': Open PrintRavi KNoch keine Bewertungen
- WIPRO - Coding - AnandDokument18 SeitenWIPRO - Coding - AnanduurchakleyaNoch keine Bewertungen
- Experiment 5Dokument10 SeitenExperiment 5Aniket SugaraNoch keine Bewertungen
- Numerical NNNNDokument23 SeitenNumerical NNNNKanchanTathodeNoch keine Bewertungen
- Halstead Software ScienceDokument2 SeitenHalstead Software Scienceyusra22100% (1)
- Nama: Asnur Saputra NIM: F1A220034 Kelas: B Prodi: S1 StatistikaDokument7 SeitenNama: Asnur Saputra NIM: F1A220034 Kelas: B Prodi: S1 StatistikaAsnur SaputraNoch keine Bewertungen
- Practical 1 Question 3Dokument10 SeitenPractical 1 Question 3ChunHoong LeeNoch keine Bewertungen
- Java AssignmentDokument40 SeitenJava AssignmentMilind Chakraborty100% (1)
- PP - PracticalDokument10 SeitenPP - PracticalAnmol RaiNoch keine Bewertungen
- CNS LabPrograms PDFDokument14 SeitenCNS LabPrograms PDFBunnyNoch keine Bewertungen
- Func: Problema 4.1Dokument7 SeitenFunc: Problema 4.1carcalete77Noch keine Bewertungen
- ICT 4303 20 Apr 2023Dokument4 SeitenICT 4303 20 Apr 2023DuoDrenchNoch keine Bewertungen
- Assignment1 DSADokument23 SeitenAssignment1 DSAShivamNoch keine Bewertungen
- C++ Seminarski Rad Igor DosenDokument39 SeitenC++ Seminarski Rad Igor Dosenpigo01Noch keine Bewertungen
- CD FileDokument31 SeitenCD Fileyipop57406Noch keine Bewertungen
- Calcdifference (Num1, Num2) Calcquotient (Num1, Num2)Dokument2 SeitenCalcdifference (Num1, Num2) Calcquotient (Num1, Num2)Xiu JingNoch keine Bewertungen
- A05Dokument3 SeitenA05abhay arNoch keine Bewertungen
- Inverse Trigonometric Functions (Trigonometry) Mathematics Question BankVon EverandInverse Trigonometric Functions (Trigonometry) Mathematics Question BankNoch keine Bewertungen
- Advanced C Concepts and Programming: First EditionVon EverandAdvanced C Concepts and Programming: First EditionBewertung: 3 von 5 Sternen3/5 (1)
- Kamothe, Navi Mumbai - 410 209 (Affiliated To University of Mumbai)Dokument19 SeitenKamothe, Navi Mumbai - 410 209 (Affiliated To University of Mumbai)AK ASHOKNoch keine Bewertungen
- Penetration Testing Methodology - 0DAYsecurityDokument2 SeitenPenetration Testing Methodology - 0DAYsecurityKenMillerNoch keine Bewertungen
- C# QBANK SOLDokument100 SeitenC# QBANK SOLamar_saxena60857100% (1)
- Week 4 - What Is OlapDokument5 SeitenWeek 4 - What Is OlapAngelique Garrido VNoch keine Bewertungen
- Oracle RACDokument3 SeitenOracle RACTheodosis ChristopoulosNoch keine Bewertungen
- Research Overcurrent ProtectionDokument4 SeitenResearch Overcurrent ProtectionSonal AggarwalNoch keine Bewertungen
- Kubernetes in 30 Minutes20170310 170313090249Dokument106 SeitenKubernetes in 30 Minutes20170310 170313090249Ajay YeruvaNoch keine Bewertungen
- Chap 10 - Arena Integration and CustomizationDokument54 SeitenChap 10 - Arena Integration and CustomizationRobson Almeida100% (1)
- TP 514935Dokument323 SeitenTP 514935Otonar Hurtado AranaNoch keine Bewertungen
- E SAPERION ReleaseNotes75Dokument13 SeitenE SAPERION ReleaseNotes75sharkNoch keine Bewertungen
- Mtcna 2Dokument5 SeitenMtcna 2Yiannis NeocleousNoch keine Bewertungen
- Hospital Management SystemDokument16 SeitenHospital Management SystemDev SoniNoch keine Bewertungen
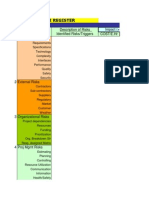
- Risk RegisterDokument34 SeitenRisk RegisterMohamedMoideenNagoorMeeran33% (3)
- Active Reports For - Net User GuideDokument255 SeitenActive Reports For - Net User GuideSilviu ŞtefureacNoch keine Bewertungen
- 3 AhmedBodyTutorialDokument10 Seiten3 AhmedBodyTutorialJesthyn VCNoch keine Bewertungen
- HTML Report & Other in JmeterDokument46 SeitenHTML Report & Other in Jmeternitintyagi1984Noch keine Bewertungen
- Bolt Pretension: Available For 3-D Simulations OnlyDokument3 SeitenBolt Pretension: Available For 3-D Simulations OnlyĐại Sứ Thiện ChíNoch keine Bewertungen
- METAMODELS - Newsletter08-Eng PDFDokument5 SeitenMETAMODELS - Newsletter08-Eng PDFds_srinivasNoch keine Bewertungen
- Zenoss Core Administration r5.0.0 LatestDokument208 SeitenZenoss Core Administration r5.0.0 LatestChandraMohanNoch keine Bewertungen
- What'S New: Sap Businessobjects Bi Suite Document Version: 4.2 Sp5 - 2017-12-15Dokument66 SeitenWhat'S New: Sap Businessobjects Bi Suite Document Version: 4.2 Sp5 - 2017-12-15sudhir.kanakotiNoch keine Bewertungen
- Blacklist SpamHausDokument4 SeitenBlacklist SpamHausjhonnathan0103Noch keine Bewertungen
- Pre-Installation Steps: Ubuntu-Linux Installation TipsDokument2 SeitenPre-Installation Steps: Ubuntu-Linux Installation TipsgpsmlkNoch keine Bewertungen
- SAP Abap TraningDokument162 SeitenSAP Abap Traningiyank85Noch keine Bewertungen
- Only Root Can Write To OSX Volumes - Can't Change Permissions Within PDFDokument40 SeitenOnly Root Can Write To OSX Volumes - Can't Change Permissions Within PDFLeonardo CostaNoch keine Bewertungen
- Bubble SensingDokument17 SeitenBubble SensingPrashanth BabuNoch keine Bewertungen
- KADaoInfo ReadmeDokument2 SeitenKADaoInfo ReadmeNombreNoch keine Bewertungen
- Endevor ToolDokument34 SeitenEndevor Tooljay570Noch keine Bewertungen
- Quilt: An XML Query Language For Heterogeneous Data Sources: Don Chamberlin Jonathan Robie Daniela FlorescuDokument10 SeitenQuilt: An XML Query Language For Heterogeneous Data Sources: Don Chamberlin Jonathan Robie Daniela FlorescuMagda AvagyanNoch keine Bewertungen
- Lessons From The Neighborhood Viewer: Building Innovative Collaborative ApplicationsDokument12 SeitenLessons From The Neighborhood Viewer: Building Innovative Collaborative ApplicationspostscriptNoch keine Bewertungen
- Walter - Themers - Guide For Reaper UsersDokument54 SeitenWalter - Themers - Guide For Reaper UsersCeffas SoftwareNoch keine Bewertungen