Das könnte Ihnen auch gefallen
- Line Follower RobotDokument22 SeitenLine Follower Robotkawish4uNoch keine Bewertungen
- Line Following Robot Tutorial - Roboveda'12Dokument8 SeitenLine Following Robot Tutorial - Roboveda'12Stefanus William SaputraNoch keine Bewertungen
- SUMOBOTDokument32 SeitenSUMOBOTmultisporkyNoch keine Bewertungen
- RoboticsDokument16 SeitenRoboticsraunak600250Noch keine Bewertungen
- Line Follower Without Using Micro ControllerDokument3 SeitenLine Follower Without Using Micro Controllerp_surya1994Noch keine Bewertungen
- Railway Accident Monitoring System: A Project Report ONDokument13 SeitenRailway Accident Monitoring System: A Project Report ONPrateek SrivastavNoch keine Bewertungen
- Line Follower Robot Using 8051 Micro ControllerDokument34 SeitenLine Follower Robot Using 8051 Micro Controllerm.abdullah100% (2)
- PDF Maze Solver RobotDokument7 SeitenPDF Maze Solver RobotVenkat AlluNoch keine Bewertungen
- Speed Control of Induction Motor by Using IR11Dokument16 SeitenSpeed Control of Induction Motor by Using IR11Anuj TripathiNoch keine Bewertungen
- Final Report On Line Follower RobotDokument44 SeitenFinal Report On Line Follower RobotAjay Verma50% (4)
- LFR Tutorial CompleteDokument22 SeitenLFR Tutorial CompleteTraic Club0% (1)
- Mini ProjectsDokument55 SeitenMini ProjectsSampath KumarNoch keine Bewertungen
- Line Follower ReportDokument23 SeitenLine Follower Reportatul mishra88% (8)
- Light Seeking Robot ReportDokument40 SeitenLight Seeking Robot ReportvishnuNoch keine Bewertungen
- Automatic Room Light Controller With Visitor Counter: DescriptionDokument10 SeitenAutomatic Room Light Controller With Visitor Counter: DescriptionDanny PinheiroNoch keine Bewertungen
- Index: Objective Introduction Circuit Description List of Components Circuit Diagram Components DescriptionDokument19 SeitenIndex: Objective Introduction Circuit Description List of Components Circuit Diagram Components DescriptionKrishnaBihariShuklaNoch keine Bewertungen
- Working Principle: 1) System CheckDokument8 SeitenWorking Principle: 1) System CheckHans IngoleNoch keine Bewertungen
- A Presentation On Line Following Robot: by Gaurav Madaan and Utkarsh SrivastavaDokument13 SeitenA Presentation On Line Following Robot: by Gaurav Madaan and Utkarsh SrivastavaGaurav MadaanNoch keine Bewertungen
- Name ID Assigned Work: Group Name: Robo Instructors Group MembersDokument6 SeitenName ID Assigned Work: Group Name: Robo Instructors Group MembersAftab Mustafa QureshiNoch keine Bewertungen
- Robot Pengantar Barang Otomatis Berbasis Mikrokontroler Avr Atmega16Dokument34 SeitenRobot Pengantar Barang Otomatis Berbasis Mikrokontroler Avr Atmega16therenkNoch keine Bewertungen
- k92-IR Remote Control DecoderDokument2 Seitenk92-IR Remote Control DecoderMoon BhaiNoch keine Bewertungen
- DC Motor ControlDokument5 SeitenDC Motor ControlSiddhasen PatilNoch keine Bewertungen
- Wireless Operated Fire Extinguisher Vehicles With Water Jet SprayDokument25 SeitenWireless Operated Fire Extinguisher Vehicles With Water Jet SprayRaushanVijaySinghNoch keine Bewertungen
- Mini Project 2a - Microcontroller Based TachometerDokument17 SeitenMini Project 2a - Microcontroller Based Tachometer10SHARMA SUMIT RAMADHINNoch keine Bewertungen
- Report Car Parking SystemDokument64 SeitenReport Car Parking SystemSebastin AshokNoch keine Bewertungen
- Circuit TodayDokument30 SeitenCircuit TodayBrian GiriNoch keine Bewertungen
- By Connecting An L298 Bridge IC To An Arduino, You Can Control A DC MotorDokument9 SeitenBy Connecting An L298 Bridge IC To An Arduino, You Can Control A DC MotorParul RathvaNoch keine Bewertungen
- GSM Robotic ArmDokument68 SeitenGSM Robotic ArmParveen KumarNoch keine Bewertungen
- Ce Lab ProjectDokument15 SeitenCe Lab ProjectFahad ChaudharyNoch keine Bewertungen
- How To Control A DC Motor With An ArduinoDokument7 SeitenHow To Control A DC Motor With An Arduinothatchaphan norkhamNoch keine Bewertungen
- People or Object Counter Circuit Diagram Using IC 555 and IC 4026Dokument4 SeitenPeople or Object Counter Circuit Diagram Using IC 555 and IC 4026Maryam AsadNoch keine Bewertungen
- Line Follwer RobotDokument32 SeitenLine Follwer RobotSahil DhingraNoch keine Bewertungen
- War Field Spying Robot With Night Vision Wireless Camera: Submitted byDokument26 SeitenWar Field Spying Robot With Night Vision Wireless Camera: Submitted byankita dhengaleNoch keine Bewertungen
- RF Based Robot SynopsisDokument6 SeitenRF Based Robot SynopsisManpreet Singh100% (1)
- 5 Channel IR Remote Control System Using MicrocontrollerDokument5 Seiten5 Channel IR Remote Control System Using MicrocontrollerKoushik MaityNoch keine Bewertungen
- Smart Bus: Seat CounterDokument6 SeitenSmart Bus: Seat Counterarunv692Noch keine Bewertungen
- RF Based Dual Mode RobotDokument17 SeitenRF Based Dual Mode Robotshuhaibasharaf100% (2)
- Joystick Controlled WheelchairDokument3 SeitenJoystick Controlled WheelchairAnonymous kw8Yrp0R5rNoch keine Bewertungen
- 10 - Mini ProjectsDokument20 Seiten10 - Mini ProjectsMohammed Bin JafarullahNoch keine Bewertungen
- Line Maze Solving RobotDokument10 SeitenLine Maze Solving Robottcteh86Noch keine Bewertungen
- Automatic Railway Gate Control SystemDokument10 SeitenAutomatic Railway Gate Control SystemKailash Kandpal100% (1)
- Smart Parking System: A Major Project ReportDokument62 SeitenSmart Parking System: A Major Project ReportNikhil RastogiNoch keine Bewertungen
- Intelligent Train Engines: General DescriptionDokument7 SeitenIntelligent Train Engines: General DescriptionRam PanwarNoch keine Bewertungen
- Automatic Street LightDokument13 SeitenAutomatic Street LightReymark CrisostomoNoch keine Bewertungen
- PID Wall FollowerDokument12 SeitenPID Wall FollowerNilanjana BhattacharyaNoch keine Bewertungen
- Line Following Robot: - Presented by Ansh Kariwal (2K20/B12/06) Aryan Dutt (2K20/B12/27)Dokument12 SeitenLine Following Robot: - Presented by Ansh Kariwal (2K20/B12/06) Aryan Dutt (2K20/B12/27)Gorilla WebDevNoch keine Bewertungen
- Line Follower Using L293DDokument8 SeitenLine Follower Using L293DPrithaj JanaNoch keine Bewertungen
- Control A DC Motor With An ArduinoDokument5 SeitenControl A DC Motor With An Arduinolizhi0007Noch keine Bewertungen
- De-Generator: DIY Sample SynthesizerDokument30 SeitenDe-Generator: DIY Sample Synthesizeromega776Noch keine Bewertungen
- Miniprojects 2017Dokument6 SeitenMiniprojects 2017Dustin GrahamNoch keine Bewertungen
- WorkingDokument3 SeitenWorkingAnuj TripathiNoch keine Bewertungen
- DTMF Controlled Robot Without MicrocontrollerDokument4 SeitenDTMF Controlled Robot Without MicrocontrollershanofaNoch keine Bewertungen
- Line Follower Robot Using ArduinoDokument13 SeitenLine Follower Robot Using Arduinolizhi2012Noch keine Bewertungen
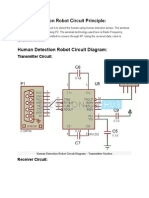
- Human Detection Robot Circuit PrincipleDokument4 SeitenHuman Detection Robot Circuit PrincipleAli KhanNoch keine Bewertungen
- V.C.U (Vehicle Control Unit) PDFDokument5 SeitenV.C.U (Vehicle Control Unit) PDFrahul kNoch keine Bewertungen
- File 1389426553Dokument25 SeitenFile 1389426553Er Amarsinh RNoch keine Bewertungen
- Newnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1Von EverandNewnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1Bewertung: 4.5 von 5 Sternen4.5/5 (3)
- Exercises in Electronics: Operational Amplifier CircuitsVon EverandExercises in Electronics: Operational Amplifier CircuitsBewertung: 3 von 5 Sternen3/5 (1)
- OverviewDokument11 SeitenOverviewMegha ShahNoch keine Bewertungen
- What Is WiMAXDokument11 SeitenWhat Is WiMAXMegha ShahNoch keine Bewertungen
- 12 Volt Lamp DimmerDokument1 Seite12 Volt Lamp DimmerMegha ShahNoch keine Bewertungen
- Capacity WimaxDokument4 SeitenCapacity WimaxMegha ShahNoch keine Bewertungen
- WTO & MFA AnalysisDokument17 SeitenWTO & MFA Analysisarun1974Noch keine Bewertungen
- Millets: Future of Food & FarmingDokument16 SeitenMillets: Future of Food & FarmingKIRAN100% (2)
- About UPSC Civil Service Examination Schedule and Subject ListDokument4 SeitenAbout UPSC Civil Service Examination Schedule and Subject Listjaythakar8887Noch keine Bewertungen
- Induction-Llgd 2022Dokument11 SeitenInduction-Llgd 2022Phạm Trúc QuỳnhNoch keine Bewertungen
- CH 2 How LAN and WAN Communications WorkDokument60 SeitenCH 2 How LAN and WAN Communications WorkBeans GaldsNoch keine Bewertungen
- Where To Eat PizzaDokument3 SeitenWhere To Eat PizzaLiliancitaLcJsNoch keine Bewertungen
- Evaluating The Policy Outcomes For Urban Resiliency in Informal Settlements Since Independence in Dhaka, Bangladesh: A ReviewDokument14 SeitenEvaluating The Policy Outcomes For Urban Resiliency in Informal Settlements Since Independence in Dhaka, Bangladesh: A ReviewJaber AbdullahNoch keine Bewertungen
- Orthopanton Villa System MedicalDokument61 SeitenOrthopanton Villa System MedicalOscarOcañaHernándezNoch keine Bewertungen
- Siemens C321 Smart LockDokument2 SeitenSiemens C321 Smart LockBapharosNoch keine Bewertungen
- Estanislao Vs CADokument2 SeitenEstanislao Vs CAChammy0% (1)
- TC 9-237 Welding 1993Dokument680 SeitenTC 9-237 Welding 1993enricoNoch keine Bewertungen
- 3.1-7 Printer Deployment - Copy (Full Permission)Dokument18 Seiten3.1-7 Printer Deployment - Copy (Full Permission)Hanzel NietesNoch keine Bewertungen
- Ins200 Assignment Hazardous PlaceDokument10 SeitenIns200 Assignment Hazardous PlaceNur Syafatin Natasya86% (7)
- Collection of Solid WasteDokument38 SeitenCollection of Solid WasteMuhammad UsmanNoch keine Bewertungen
- Wilo49608 Wilo Ge LeafletDokument46 SeitenWilo49608 Wilo Ge LeafletJair Jimenez HerreraNoch keine Bewertungen
- CRM Module 1Dokument58 SeitenCRM Module 1Dhrupal TripathiNoch keine Bewertungen
- Alfa Laval Plate Heat Exchangers: A Product Catalogue For Comfort Heating and CoolingDokument8 SeitenAlfa Laval Plate Heat Exchangers: A Product Catalogue For Comfort Heating and CoolingvictoryanezNoch keine Bewertungen
- Phet Body Group 1 ScienceDokument42 SeitenPhet Body Group 1 ScienceMebel Alicante GenodepanonNoch keine Bewertungen
- EE FlowchartDokument1 SeiteEE Flowchartgoogley71Noch keine Bewertungen
- LS Series Hand Crimping ToolsDokument4 SeitenLS Series Hand Crimping ToolsbaolifengNoch keine Bewertungen
- Lecture 3 - Marriage and Marriage PaymentsDokument11 SeitenLecture 3 - Marriage and Marriage PaymentsGrace MguniNoch keine Bewertungen
- Huzaima ResultDokument2 SeitenHuzaima ResultSaif Ali KhanNoch keine Bewertungen
- Formula Retail and Large Controls Planning Department ReportDokument235 SeitenFormula Retail and Large Controls Planning Department ReportMissionLocalNoch keine Bewertungen
- Mobilcut 102 Hoja TecnicaDokument2 SeitenMobilcut 102 Hoja TecnicaCAGERIGONoch keine Bewertungen
- Steris Amsco Century v120Dokument2 SeitenSteris Amsco Century v120Juan OrtizNoch keine Bewertungen
- COMMUNICATIONS Formulas and ConceptsDokument24 SeitenCOMMUNICATIONS Formulas and ConceptsAllan Paul Lorenzo Abando76% (17)
- Student Application Form BCIS - 2077Dokument2 SeitenStudent Application Form BCIS - 2077Raaz Key Run ChhatkuliNoch keine Bewertungen
- Curriculum Vitae H R VijayDokument8 SeitenCurriculum Vitae H R VijayvijaygowdabdvtNoch keine Bewertungen
- Keywords: Communication, Technology, Collaborative, Evaluative Learning, InnovativeDokument11 SeitenKeywords: Communication, Technology, Collaborative, Evaluative Learning, InnovativeNnamani EmmanuelNoch keine Bewertungen
- ANNEX C LIST OF EXCEPTIONS (Non-Disslosure of Information)Dokument3 SeitenANNEX C LIST OF EXCEPTIONS (Non-Disslosure of Information)ryujinxxcastorNoch keine Bewertungen