Das könnte Ihnen auch gefallen
- Problem Set in DC MachinesDokument7 SeitenProblem Set in DC MachinesJan Henry JebulanNoch keine Bewertungen
- Shine, Jesus Shine (A)Dokument2 SeitenShine, Jesus Shine (A)Ezekiel Brizuela100% (1)
- DC MotorsDokument8 SeitenDC MotorsIrvin BialaNoch keine Bewertungen
- DC Machines QuizDokument9 SeitenDC Machines QuizDanny MartinNoch keine Bewertungen
- Enercon Finals Assignment 5Dokument18 SeitenEnercon Finals Assignment 5Ezekiel Brizuela100% (2)
- Sheet 3: DC and Synchronous MachinesDokument8 SeitenSheet 3: DC and Synchronous MachinesMohammed Montaser50% (2)
- My Life Is in You Lord (G)Dokument1 SeiteMy Life Is in You Lord (G)Ezekiel BrizuelaNoch keine Bewertungen
- Parallel Operation of DC GeneratorsDokument2 SeitenParallel Operation of DC GeneratorsNino Gabriel Esguerra67% (3)
- Chapter2 1Dokument3 SeitenChapter2 1Leo Paulo Del Rosario40% (5)
- Dokumen - Tips - Machine Problem With AnswerDokument7 SeitenDokumen - Tips - Machine Problem With AnswerLanz CruzatNoch keine Bewertungen
- DC Motor Are of 3 Types They Are .Dokument12 SeitenDC Motor Are of 3 Types They Are .Krishna100% (1)
- Mega-Ultra Ps Compilation5.0-1Dokument550 SeitenMega-Ultra Ps Compilation5.0-1Eman Lampago AntoNoch keine Bewertungen
- DC and Ac Generators PDFDokument8 SeitenDC and Ac Generators PDFLanugan, Jenkhen B.Noch keine Bewertungen
- DC. GeneratorsDokument22 SeitenDC. GeneratorsAbdulrazzaq50% (2)
- Open The Eyes of My Heart (D)Dokument1 SeiteOpen The Eyes of My Heart (D)Ezekiel BrizuelaNoch keine Bewertungen
- S Announcement 35540 PDFDokument17 SeitenS Announcement 35540 PDFrovil glynce bastianNoch keine Bewertungen
- Advantages and Disadvantages of DC MotorDokument6 SeitenAdvantages and Disadvantages of DC MotorMuhd Izwan Ikhmal RosliNoch keine Bewertungen
- Power System, Fault Analysis and EquipmentDokument23 SeitenPower System, Fault Analysis and Equipmentjohn benedict orbe100% (1)
- Past Board Exam Questions in DC MachinesDokument4 SeitenPast Board Exam Questions in DC MachinesJoichiro NishiNoch keine Bewertungen
- Activity 1Dokument9 SeitenActivity 1John Patrick Celda100% (1)
- AC MachinesDokument5 SeitenAC Machinesjoshua palizaNoch keine Bewertungen
- Module 4 BDokument24 SeitenModule 4 BBu DakNoch keine Bewertungen
- Bsee-3c Pee6-M Assignment 1Dokument4 SeitenBsee-3c Pee6-M Assignment 1Ela Jane Maylas100% (1)
- Chapter 7 QuestionsDokument8 SeitenChapter 7 QuestionsNicole Irene Dela Pena67% (3)
- A304SE PPT Slides T111 - FinalDokument194 SeitenA304SE PPT Slides T111 - FinalEranga Nandana Kumara KudahewaNoch keine Bewertungen
- Siskind DC Machines Q&A AnswersDokument11 SeitenSiskind DC Machines Q&A AnswersAlbany Smash100% (5)
- Shepherd of My Soul (D)Dokument1 SeiteShepherd of My Soul (D)Ezekiel BrizuelaNoch keine Bewertungen
- Pumps: University of The East - Caloocan Department of Mechanical EngineeringDokument14 SeitenPumps: University of The East - Caloocan Department of Mechanical EngineeringJohn Patrick Abad100% (1)
- Candolita - POWER PLANT-ASSIGNMENT 2 PDFDokument3 SeitenCandolita - POWER PLANT-ASSIGNMENT 2 PDFCy CandolitsNoch keine Bewertungen
- Acdc - DC Motor - Lecture Notes 5Dokument30 SeitenAcdc - DC Motor - Lecture Notes 5Cllyan ReyesNoch keine Bewertungen
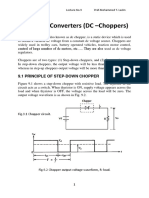
- DC-DC Converters (DC - Choppers) : 9.1 Principle of Step Down ChopperDokument18 SeitenDC-DC Converters (DC - Choppers) : 9.1 Principle of Step Down ChopperSaif UddinNoch keine Bewertungen
- Chapter 5 Eneergy Con 2Dokument4 SeitenChapter 5 Eneergy Con 2LuelsonCordovaDeclaradorNoch keine Bewertungen
- Notes DC MACHINES - Compound PDFDokument8 SeitenNotes DC MACHINES - Compound PDFJm PotenciandoNoch keine Bewertungen
- Ac 1Dokument2 SeitenAc 1Charina Pinlac100% (3)
- Bachelor of Science in Mechanical Engineering - B: Final ProjectDokument15 SeitenBachelor of Science in Mechanical Engineering - B: Final Projectjethro ganeloNoch keine Bewertungen
- Chapter 4Dokument60 SeitenChapter 4Vince Dominich MadroneroNoch keine Bewertungen
- AC&DC Direct Current Electrical Machinery Generalization, December 13, 2016,2nd Semester SY2016to2017TIPDokument58 SeitenAC&DC Direct Current Electrical Machinery Generalization, December 13, 2016,2nd Semester SY2016to2017TIPKatrina Nieto Calanglang-Dayoc100% (1)
- Handout 3 Types of DC GeneratorsDokument11 SeitenHandout 3 Types of DC GeneratorsAdriel JohnNoch keine Bewertungen
- ENERCON - BrizuelaDokument13 SeitenENERCON - BrizuelaEzekiel Brizuela100% (1)
- DC Machines Module 7Dokument25 SeitenDC Machines Module 7Joshua Roberto GrutaNoch keine Bewertungen
- Chapter 6 Energy ConDokument6 SeitenChapter 6 Energy ConLuelsonCordovaDeclarador0% (1)
- University of Rizal System: Electro-Mechanical Energy Conversion (EE 4) (For Completion)Dokument9 SeitenUniversity of Rizal System: Electro-Mechanical Energy Conversion (EE 4) (For Completion)Eric Justin Tan CarreonNoch keine Bewertungen
- EGYCON Lesson 3 - DC Armature Winding Construction Part 1Dokument15 SeitenEGYCON Lesson 3 - DC Armature Winding Construction Part 1yolop100% (1)
- Assignment Sa EnerconDokument18 SeitenAssignment Sa EnerconAriel Navaja0% (2)
- Generators Acapp 2nd1718 4Dokument19 SeitenGenerators Acapp 2nd1718 4Anonymous uCjM4Q0% (2)
- DC Machine61 74Dokument3 SeitenDC Machine61 74Charina PinlacNoch keine Bewertungen
- MAGATDokument1 SeiteMAGATReden LopezNoch keine Bewertungen
- Basic Sciences CaraigDokument81 SeitenBasic Sciences CaraigMatthew Anthony Mallari0% (1)
- Engineering MechanicsDokument86 SeitenEngineering MechanicsJay Mark CayonteNoch keine Bewertungen
- Experiment 2 HORSEPOWER EFFICIENCY GEAR RATIO AND SPEED RATIODokument10 SeitenExperiment 2 HORSEPOWER EFFICIENCY GEAR RATIO AND SPEED RATIOJake Polo SantiagoNoch keine Bewertungen
- Sample Exercises Rankine CycleDokument1 SeiteSample Exercises Rankine CycleLily Antonette AgustinNoch keine Bewertungen
- Lesson 8 - DC MotorsDokument35 SeitenLesson 8 - DC MotorsKaelel BilangNoch keine Bewertungen
- Acdc - DC Motor - Lecture Notes 4Dokument34 SeitenAcdc - DC Motor - Lecture Notes 4Cllyan ReyesNoch keine Bewertungen
- AC Machine Questions With Answer 1Dokument11 SeitenAC Machine Questions With Answer 1Janiel MalitNoch keine Bewertungen
- Quiz1 Ac Otplusbook-1Dokument37 SeitenQuiz1 Ac Otplusbook-1ianguieb0% (1)
- DC GeneratorDokument2 SeitenDC GeneratorFaye Medez Granada0% (1)
- Lab No. 24Dokument6 SeitenLab No. 24hwai xi0% (1)
- Refrigeration Problem SetsDokument5 SeitenRefrigeration Problem SetsNiño Gerard JabagatNoch keine Bewertungen
- Chapter 7 - Geothermal PowerDokument2 SeitenChapter 7 - Geothermal PowerHectorCabz100% (1)
- S Announcement 6818Dokument1 SeiteS Announcement 6818Tristan Tabago ConsolacionNoch keine Bewertungen
- M2 CO2 (2) Parallel Operation of DC GeneratorsDokument5 SeitenM2 CO2 (2) Parallel Operation of DC GeneratorsEkoms GamingNoch keine Bewertungen
- Activity 3 TANGONAN - PlanimeterDokument9 SeitenActivity 3 TANGONAN - PlanimeterBryan TangonanNoch keine Bewertungen
- Ebol, Kenn Act 9Dokument3 SeitenEbol, Kenn Act 9Techno HubNoch keine Bewertungen
- Machine Design QuizDokument2 SeitenMachine Design QuizMarc Graham NacuaNoch keine Bewertungen
- What Is Meant by A Load On A Generator? A Load On A Motor?Dokument9 SeitenWhat Is Meant by A Load On A Generator? A Load On A Motor?I am Just TrollingNoch keine Bewertungen
- Ee LawDokument11 SeitenEe LawI am Just TrollingNoch keine Bewertungen
- EEE Lab Viva QDokument5 SeitenEEE Lab Viva Qkamalilakshmanan3Noch keine Bewertungen
- Unit 4Dokument33 SeitenUnit 4SidhuSidNoch keine Bewertungen
- Mary June F. Avila BSME 3-EVEDokument2 SeitenMary June F. Avila BSME 3-EVEZaxyNoch keine Bewertungen
- ENERCON - BrizuelaDokument13 SeitenENERCON - BrizuelaEzekiel Brizuela100% (1)
- Tell The World (A)Dokument3 SeitenTell The World (A)Ezekiel BrizuelaNoch keine Bewertungen
- Midterm AssignmentDokument7 SeitenMidterm AssignmentEzekiel BrizuelaNoch keine Bewertungen
- Sa'Yo MagpupuriDokument1 SeiteSa'Yo MagpupuriEzekiel BrizuelaNoch keine Bewertungen
- Shout For Joy (G)Dokument1 SeiteShout For Joy (G)Ezekiel BrizuelaNoch keine Bewertungen
- I'm Glad You Are Here (G)Dokument1 SeiteI'm Glad You Are Here (G)Ezekiel BrizuelaNoch keine Bewertungen
- Open The Eyes of My Heart (E)Dokument1 SeiteOpen The Eyes of My Heart (E)Ezekiel BrizuelaNoch keine Bewertungen
- We Will Praise You (D)Dokument1 SeiteWe Will Praise You (D)Ezekiel BrizuelaNoch keine Bewertungen
- One Way (B)Dokument1 SeiteOne Way (B)Ezekiel BrizuelaNoch keine Bewertungen
- Some Boast (G)Dokument1 SeiteSome Boast (G)Ezekiel Brizuela0% (1)
- Let There Be Praise (D)Dokument1 SeiteLet There Be Praise (D)Ezekiel Brizuela100% (2)
- Let There Be Joy (G)Dokument1 SeiteLet There Be Joy (G)Ezekiel BrizuelaNoch keine Bewertungen
- Jehovah Jireh (Em)Dokument1 SeiteJehovah Jireh (Em)Ezekiel BrizuelaNoch keine Bewertungen
- Jesus You Are Glorious (G)Dokument2 SeitenJesus You Are Glorious (G)Ezekiel BrizuelaNoch keine Bewertungen
- Jesus Is Alive (D)Dokument1 SeiteJesus Is Alive (D)Ezekiel BrizuelaNoch keine Bewertungen
- You Shine (E)Dokument1 SeiteYou Shine (E)Ezekiel BrizuelaNoch keine Bewertungen
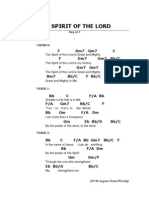
- The Spirit of The Lord (F)Dokument1 SeiteThe Spirit of The Lord (F)Ezekiel BrizuelaNoch keine Bewertungen
- Trading My Sorrows (G)Dokument1 SeiteTrading My Sorrows (G)Ezekiel BrizuelaNoch keine Bewertungen
- Sing Unto The Lord (DM)Dokument1 SeiteSing Unto The Lord (DM)Ezekiel BrizuelaNoch keine Bewertungen
- Control System I Practical Iv Semester, B.Tech Ee Course Code: Eec273Dokument5 SeitenControl System I Practical Iv Semester, B.Tech Ee Course Code: Eec273JomeNoch keine Bewertungen
- KSKV Teknologi Elektrik Sem1 Hingga Sem4Dokument155 SeitenKSKV Teknologi Elektrik Sem1 Hingga Sem4Muhd Muhd HasifNoch keine Bewertungen
- Servo MotorDokument21 SeitenServo MotorsafvanshaikhNoch keine Bewertungen
- Wollega University Business and Technology Incubation Center (2019)Dokument22 SeitenWollega University Business and Technology Incubation Center (2019)Kasehun Getinet KitilaNoch keine Bewertungen
- MDD10A User's ManualDokument10 SeitenMDD10A User's ManualiankulehNoch keine Bewertungen
- A Synopsis Report ON Speed Control of DC Motor Using Arduino Microcontroller Board and PWMDokument14 SeitenA Synopsis Report ON Speed Control of DC Motor Using Arduino Microcontroller Board and PWMsaikumarNoch keine Bewertungen
- DC Motor Interview Questions and Answers: AnswerDokument4 SeitenDC Motor Interview Questions and Answers: Answerশ্রী লিমন চন্দ্র মোহন্তNoch keine Bewertungen
- ECE462 Motor Lab Experiment3Dokument14 SeitenECE462 Motor Lab Experiment3eng_abdelghany1979Noch keine Bewertungen
- Ee2105 Em-I QB Cat-2Dokument2 SeitenEe2105 Em-I QB Cat-2sjuma7125Noch keine Bewertungen
- EX 2 Brushless DC Motor 1600073824807Dokument23 SeitenEX 2 Brushless DC Motor 1600073824807kewalNoch keine Bewertungen
- APCPDCL Energy Assistant JLM Grade II 2021Dokument27 SeitenAPCPDCL Energy Assistant JLM Grade II 2021Nagi ReddyNoch keine Bewertungen
- R17 Ug PDFDokument55 SeitenR17 Ug PDFAlapati RajasekharNoch keine Bewertungen
- Maxon DCXDokument23 SeitenMaxon DCXMurtaza KhanNoch keine Bewertungen
- Designing A DC MotorDokument7 SeitenDesigning A DC MotorPravat SatpathyNoch keine Bewertungen
- SSC JE Electrical SyllabusDokument4 SeitenSSC JE Electrical SyllabusHarpal SainiNoch keine Bewertungen
- RCLM Kit 1 Convert Your Existing Lawn Mower in To A Hybrid Remote Control Lawn Mower Rev 2Dokument21 SeitenRCLM Kit 1 Convert Your Existing Lawn Mower in To A Hybrid Remote Control Lawn Mower Rev 2Peter MollNoch keine Bewertungen
- Kelly Ke Bus Er ManualDokument8 SeitenKelly Ke Bus Er ManualAlonso LamusNoch keine Bewertungen
- BEEM 2marks PDFDokument40 SeitenBEEM 2marks PDFPragna Sidhireddy100% (1)
- Electrical Engineering Technician Part 1Dokument4 SeitenElectrical Engineering Technician Part 1kseenanan123Noch keine Bewertungen
- DC Machines Lab ManualDokument56 SeitenDC Machines Lab ManualRockstar RichNoch keine Bewertungen
- A Short Resume of One of The Famous Iranian Professor in The USA .Dokument39 SeitenA Short Resume of One of The Famous Iranian Professor in The USA .yusef_behdariNoch keine Bewertungen
- Notes On 2nd Physics by Asif RasheedDokument31 SeitenNotes On 2nd Physics by Asif RasheedAsif Rasheed Rajput100% (1)
- DC GeneratorDokument36 SeitenDC GeneratorJessica Laine TumbagaNoch keine Bewertungen
- 442 Adoc QDokument172 Seiten442 Adoc QNitesh KadiyaNoch keine Bewertungen