Das könnte Ihnen auch gefallen
- VENETIAN CAROUSEL Mod. 10,50/2P-B Equipment'S Manual Chapter 2 - DESCRIPTIONDokument19 SeitenVENETIAN CAROUSEL Mod. 10,50/2P-B Equipment'S Manual Chapter 2 - DESCRIPTIONbugseNoch keine Bewertungen
- s13 Ecu Pinout Ca18detDokument1 Seites13 Ecu Pinout Ca18detEduardo Junior Obando Romero0% (1)
- Amt630a 7D DB V5.4 20150629Dokument2 SeitenAmt630a 7D DB V5.4 20150629Aytac Gul100% (2)
- Item:130ST Series Servo Motor: SpecificationsDokument4 SeitenItem:130ST Series Servo Motor: Specificationsn13t0314Noch keine Bewertungen
- ParagontransmissionDokument24 SeitenParagontransmissionJoost van Berkel100% (1)
- Philips DCC 900 Service Manual Searchable PDFDokument92 SeitenPhilips DCC 900 Service Manual Searchable PDFUgo Rampazzo100% (1)
- MD 175 B (LVF-RCV-DVF Şema)Dokument21 SeitenMD 175 B (LVF-RCV-DVF Şema)Ali özkanlıNoch keine Bewertungen
- Power Supply LED Driver 715G6353-P01-000-0020 Philips TPM14.2E LADokument6 SeitenPower Supply LED Driver 715G6353-P01-000-0020 Philips TPM14.2E LARaul Lopez ReinaNoch keine Bewertungen
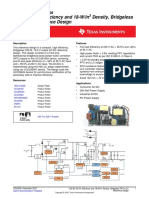
- Tiduef8 PDFDokument23 SeitenTiduef8 PDFchethanNoch keine Bewertungen
- PJ500MDokument92 SeitenPJ500Mvasilikot100% (2)
- Towcon Manual PDFDokument124 SeitenTowcon Manual PDFThiago LimaNoch keine Bewertungen
- STM32F103C8T6 Dev Board SCH PDFDokument1 SeiteSTM32F103C8T6 Dev Board SCH PDFTeuku Makmur TsaniNoch keine Bewertungen
- Constructional Features of DC MotorDokument34 SeitenConstructional Features of DC MotorBala SankarNoch keine Bewertungen
- Toshiba M100 ATAU M105 LA 3011P Rev 1B PDFDokument48 SeitenToshiba M100 ATAU M105 LA 3011P Rev 1B PDFfir232Noch keine Bewertungen
- Doha XT2019 Moto G8 Plus - TS GUIDE - Trouble Shooting GuildDokument34 SeitenDoha XT2019 Moto G8 Plus - TS GUIDE - Trouble Shooting GuildfreshjointNoch keine Bewertungen
- Ac Voltage Controller Using Thyristor Project Report by SandeepDokument29 SeitenAc Voltage Controller Using Thyristor Project Report by SandeepSANDEEP DHANDA100% (1)
- MLD-180-01 180W LCD Power: OCP OCP OCP OCP OVP OVP OVP OVP OVP OVP OVP OVPDokument2 SeitenMLD-180-01 180W LCD Power: OCP OCP OCP OCP OVP OVP OVP OVP OVP OVP OVP OVPies837Noch keine Bewertungen
- Samsung Ht-c453 XapDokument82 SeitenSamsung Ht-c453 XapRyszard Szaraniec100% (1)
- How To Design Multi-kW Converters For Electric VehiclesDokument22 SeitenHow To Design Multi-kW Converters For Electric VehiclesThien DinhNoch keine Bewertungen
- TCL l40f10f - Power InveterDokument3 SeitenTCL l40f10f - Power InveterĐặngĐạt100% (1)
- PCA10056 Schematic and PCBDokument13 SeitenPCA10056 Schematic and PCBThanga rajNoch keine Bewertungen
- SP FLX SGT 50.v3Dokument2 SeitenSP FLX SGT 50.v3sungkarsNoch keine Bewertungen
- Ferrite Transformer Turns Calculation With ExampleDokument4 SeitenFerrite Transformer Turns Calculation With ExampleKerlin Sanabria0% (1)
- IPG Interface Specification 110701 YLP Series Type E PDFDokument28 SeitenIPG Interface Specification 110701 YLP Series Type E PDFOsamagirl69Noch keine Bewertungen
- Electromagnetic RelaysDokument26 SeitenElectromagnetic RelaysMk PandiyanNoch keine Bewertungen
- Hitachi Transistor-1 PDFDokument16 SeitenHitachi Transistor-1 PDFAbdalla YousefNoch keine Bewertungen
- Panasonic - PDP TH 37 42 pv70xx - Gph10deDokument85 SeitenPanasonic - PDP TH 37 42 pv70xx - Gph10defaroltek0% (1)
- PB-632 How To Replace TS1 With TS2 V1aDokument3 SeitenPB-632 How To Replace TS1 With TS2 V1avikram banthiaNoch keine Bewertungen
- 2A, 23V, 340Khz Synchronous Step-Down Converter: General Description FeaturesDokument14 Seiten2A, 23V, 340Khz Synchronous Step-Down Converter: General Description FeaturesGioVoTamNoch keine Bewertungen
- Auma RWGDokument8 SeitenAuma RWGsdfsfgNoch keine Bewertungen
- Bn44-00517a PD32B1D-CSM Pslf790d04aDokument1 SeiteBn44-00517a PD32B1D-CSM Pslf790d04aGuillaume HubertNoch keine Bewertungen
- 4-EL Sewedy Cables Power-Cables-CatalogueDokument1 Seite4-EL Sewedy Cables Power-Cables-CatalogueKarim MakkiNoch keine Bewertungen
- TCW-605 InstructionsDokument25 SeitenTCW-605 InstructionsJavier Mardones D'AppollonioNoch keine Bewertungen
- 2ch DC Transceiver With mc3361 CircuitDokument1 Seite2ch DC Transceiver With mc3361 Circuitzarkinos sakis100% (1)
- 6 - Dynamic Model of The Induction MotorDokument11 Seiten6 - Dynamic Model of The Induction MotorQuynh tran100% (2)
- PLL FM RadioDokument3 SeitenPLL FM Radiofnu sudarmajiNoch keine Bewertungen
- Mt5309mudt BDokument1 SeiteMt5309mudt Btv serviceNoch keine Bewertungen
- Alinco DR-150 Service ManualDokument44 SeitenAlinco DR-150 Service ManualYayok S. Anggoro100% (4)
- SCARP User Manual - r1.4Dokument50 SeitenSCARP User Manual - r1.4hbushan931Noch keine Bewertungen
- SM G386T1 Tshoo 7 PDFDokument40 SeitenSM G386T1 Tshoo 7 PDFJhonn arcilaNoch keine Bewertungen
- Types of TransformersDokument27 SeitenTypes of Transformerskyaw winNoch keine Bewertungen
- 3 Phase Six Step InverterDokument25 Seiten3 Phase Six Step InverterRavi karanNoch keine Bewertungen
- Omron Relay Catalogue PDFDokument58 SeitenOmron Relay Catalogue PDFQuan PhanNoch keine Bewertungen
- Wecon Manual Variador VBDokument62 SeitenWecon Manual Variador VBsonirichnaviNoch keine Bewertungen
- Thyrotronic (Russian) (1.1 MB)Dokument8 SeitenThyrotronic (Russian) (1.1 MB)brobataNoch keine Bewertungen
- Ferrite Core Datasheet PDFDokument45 SeitenFerrite Core Datasheet PDFOnlineShop ShopNoch keine Bewertungen
- Symetrix 528E EsquematicDokument7 SeitenSymetrix 528E EsquematicJoão carlos Júnior100% (1)
- Mosfet Drive 1234 CircuitDokument1 SeiteMosfet Drive 1234 CircuitWaseem WlNoch keine Bewertungen
- XL6008 DatasheetDokument8 SeitenXL6008 DatasheetAnonymous roFhLslwIFNoch keine Bewertungen
- Comparison of Ic Logic FamiliesDokument1 SeiteComparison of Ic Logic FamiliesPiash DasNoch keine Bewertungen
- Remote and Temperature Controlled FanDokument8 SeitenRemote and Temperature Controlled Fanchipku23Noch keine Bewertungen
- Relay Socket FamilyDokument76 SeitenRelay Socket FamilyceljkoNoch keine Bewertungen
- Philips 715g8672-p02-000-002h Psu SCH PDFDokument4 SeitenPhilips 715g8672-p02-000-002h Psu SCH PDFZoltán Stier50% (2)
- Test Machine Sesi 1718 Sem 2 Second VersionDokument3 SeitenTest Machine Sesi 1718 Sem 2 Second VersionaimamNoch keine Bewertungen
- Application Note AN-6026: Design of Power Factor Correction Circuit Using FAN7529Dokument23 SeitenApplication Note AN-6026: Design of Power Factor Correction Circuit Using FAN7529miloud1911Noch keine Bewertungen
- DC Brushless MotorDokument10 SeitenDC Brushless MotorSyed MamnoonNoch keine Bewertungen
- Stepper MotorsDokument26 SeitenStepper MotorsRam Kumar GogadaNoch keine Bewertungen
- Beee Unit-4 Induction & Synchronous MotorsDokument27 SeitenBeee Unit-4 Induction & Synchronous MotorssrujithvedagiriNoch keine Bewertungen
- Three-Phase Induction MotorDokument17 SeitenThree-Phase Induction MotorAdarsh AdarshNoch keine Bewertungen
- Induction - Motor SlidesDokument74 SeitenInduction - Motor SlidesShantanu PaulNoch keine Bewertungen
- Brushless DC MotorDokument6 SeitenBrushless DC Motorpsksiva13Noch keine Bewertungen
- 7 - Lecture - Induction MotorsDokument41 Seiten7 - Lecture - Induction MotorspaurushgodharNoch keine Bewertungen
- Gem Availability Report & Past Transaction SummaryDokument9 SeitenGem Availability Report & Past Transaction SummarypviveknaiduNoch keine Bewertungen
- CBSE Class 7 Social Science Question Paper Set ADokument6 SeitenCBSE Class 7 Social Science Question Paper Set Asiba padhy100% (2)
- WritingDokument35 SeitenWritingpviveknaiduNoch keine Bewertungen
- CBSE Class 7 Social Science Question Paper Set CDokument6 SeitenCBSE Class 7 Social Science Question Paper Set CpviveknaiduNoch keine Bewertungen
- Class7 - Bio - Nutrition in AnimalsDokument6 SeitenClass7 - Bio - Nutrition in AnimalspviveknaiduNoch keine Bewertungen
- 06 - SST QPDokument4 Seiten06 - SST QPpviveknaiduNoch keine Bewertungen
- Read The Poem CarefullyDokument4 SeitenRead The Poem CarefullypviveknaiduNoch keine Bewertungen
- Class 3 Work Sheet MathsDokument5 SeitenClass 3 Work Sheet MathspviveknaiduNoch keine Bewertungen
- 1.1 Sodium Cooled Fast Breeder ReactorsDokument31 Seiten1.1 Sodium Cooled Fast Breeder ReactorspviveknaiduNoch keine Bewertungen
- Materials Science and Engineering - A First Course - V. RaghavanDokument53 SeitenMaterials Science and Engineering - A First Course - V. Raghavanpviveknaidu60% (5)
- Procedures For Uninterruptible Power Supply (UPS) Systems: BangorDokument5 SeitenProcedures For Uninterruptible Power Supply (UPS) Systems: BangorpviveknaiduNoch keine Bewertungen
- Class 4 Unit 10 Worksheet For Sa2 EnglishDokument3 SeitenClass 4 Unit 10 Worksheet For Sa2 EnglishpviveknaiduNoch keine Bewertungen
- Class 4 Unit 9 Worksheet For Sa2 EnglishDokument3 SeitenClass 4 Unit 9 Worksheet For Sa2 EnglishpviveknaiduNoch keine Bewertungen
- Cl-IV Evs Worksheet 2017Dokument7 SeitenCl-IV Evs Worksheet 2017pviveknaiduNoch keine Bewertungen
- CL 3 ENG SD Worksheet 2016-17Dokument5 SeitenCL 3 ENG SD Worksheet 2016-17pviveknaiduNoch keine Bewertungen
- Rto PplictionDokument1 SeiteRto PplictionpviveknaiduNoch keine Bewertungen
- Duplication Asset Type Founded in Form No. IIDokument2 SeitenDuplication Asset Type Founded in Form No. IIpviveknaiduNoch keine Bewertungen
- Obt RIxwsz V7 Jga VZDokument6 SeitenObt RIxwsz V7 Jga VZpviveknaiduNoch keine Bewertungen
- Paper07 Marschalko 4Dokument0 SeitenPaper07 Marschalko 4pviveknaiduNoch keine Bewertungen
- Analysis of Wind and PV SystemsDokument17 SeitenAnalysis of Wind and PV SystemspviveknaiduNoch keine Bewertungen
- LG Cassette Brochure Feb 2021Dokument7 SeitenLG Cassette Brochure Feb 2021Junior EngineerNoch keine Bewertungen
- SPRacingF3 Manual LatestDokument9 SeitenSPRacingF3 Manual Latestasl68yNoch keine Bewertungen
- SXL vs. GXL vs. TXL WireDokument14 SeitenSXL vs. GXL vs. TXL WirejackNoch keine Bewertungen
- Servo Info and CenteringDokument5 SeitenServo Info and Centeringspy004Noch keine Bewertungen
- WEG CFW300 User Manual 10003325037 en Es PT PDFDokument153 SeitenWEG CFW300 User Manual 10003325037 en Es PT PDFmaurosergiorovettaNoch keine Bewertungen
- ABB Publication 1MRK509015-BEN C en High Impedance Differential Relay RADHADokument5 SeitenABB Publication 1MRK509015-BEN C en High Impedance Differential Relay RADHAjavedsmg1Noch keine Bewertungen
- Programmable Logic Controller (PLC) Is A Digital Computer Used For The Automation of VariousDokument23 SeitenProgrammable Logic Controller (PLC) Is A Digital Computer Used For The Automation of VariousSunil ChaudhariNoch keine Bewertungen
- Yaskawa SGDB ManualDokument652 SeitenYaskawa SGDB ManualMichael KennaNoch keine Bewertungen
- TORO Reelmaster 3100-DDokument306 SeitenTORO Reelmaster 3100-Ddalidelia100% (1)
- Datasheet PDFDokument4 SeitenDatasheet PDFJose Luis Guanchez CarrilloNoch keine Bewertungen
- Kitchen Aid Kebs208 Oven PartsDokument7 SeitenKitchen Aid Kebs208 Oven PartsfiskitNoch keine Bewertungen
- SMC-Flex™ Smart Motor Controller: Solid-State Motor ControlDokument100 SeitenSMC-Flex™ Smart Motor Controller: Solid-State Motor ControlHernan PatarroyoNoch keine Bewertungen
- CONTRACT - JAP006-D73 132/11kV PALM, JUMEIRAH S/S (4 Nos) 11Kv Switchgear VT CalculationDokument6 SeitenCONTRACT - JAP006-D73 132/11kV PALM, JUMEIRAH S/S (4 Nos) 11Kv Switchgear VT CalculationmadhavanNoch keine Bewertungen
- Various ToolRoomDokument18 SeitenVarious ToolRoomToshang SharmaNoch keine Bewertungen
- Carrier 7.5TRDokument2 SeitenCarrier 7.5TRbrian mmec2020Noch keine Bewertungen
- NUVE EN 032-055-120 Incubators BrochureDokument2 SeitenNUVE EN 032-055-120 Incubators BrochureDinhtrung TruongNoch keine Bewertungen
- Ac 1Dokument2 SeitenAc 1Alfredo jose Medina revattaNoch keine Bewertungen
- Bioentry W: Installation GuideDokument20 SeitenBioentry W: Installation GuidePaul CuevaNoch keine Bewertungen
- ATV930 950 Installation Manual en NHA80932 03Dokument143 SeitenATV930 950 Installation Manual en NHA80932 03Anonymous Th1OVYPQYTNoch keine Bewertungen
- Motor 60Z02152 - 03 (1) CAT3306 CrankshaftDokument5 SeitenMotor 60Z02152 - 03 (1) CAT3306 CrankshaftIsmael De Jesus AndradeNoch keine Bewertungen
- Server x3550 7879 Manual de InstalacionDokument18 SeitenServer x3550 7879 Manual de InstalacionMilton TriviñoNoch keine Bewertungen
- Drawings 04272017Dokument118 SeitenDrawings 04272017Robert TirtaNoch keine Bewertungen
- Special Purpose Vehicles: Padhiyar Raj H Automobile Department Saffrony Institute of TechnologyDokument34 SeitenSpecial Purpose Vehicles: Padhiyar Raj H Automobile Department Saffrony Institute of TechnologyBirjesh YaduvanshiNoch keine Bewertungen
- User Guide: Issue 1.1 January 2006Dokument17 SeitenUser Guide: Issue 1.1 January 2006Allegra AmiciNoch keine Bewertungen
- by NikhilDokument20 Seitenby Nikhilsai nikhil kolasaniNoch keine Bewertungen
- Application Guide of IGBT DriverDokument17 SeitenApplication Guide of IGBT DriverNam DoanNoch keine Bewertungen
- Impact - 5 2Dokument8 SeitenImpact - 5 2Demianus DemmaNoch keine Bewertungen
- Sawiko Trailer LoadDokument7 SeitenSawiko Trailer LoadJurgen GeeregatNoch keine Bewertungen