Das könnte Ihnen auch gefallen
- Einstein HoaxDokument343 SeitenEinstein HoaxTS100% (1)
- News CorpDokument17 SeitenNews CorpIshita SharmaNoch keine Bewertungen
- FIRE Protection Engineering Winter 2002Dokument64 SeitenFIRE Protection Engineering Winter 2002Hany RifaatNoch keine Bewertungen
- Level 1:: Advanced Financial Modeler (Afm)Dokument23 SeitenLevel 1:: Advanced Financial Modeler (Afm)munaftNoch keine Bewertungen
- BI11-157 Computer Architecture Performance AnalysisDokument6 SeitenBI11-157 Computer Architecture Performance AnalysisLong NguyễnNoch keine Bewertungen
- Chapter 3 Stability, Controllability and ObservaciltiyDokument41 SeitenChapter 3 Stability, Controllability and Observaciltiytarekegn utaNoch keine Bewertungen
- OS Lab 4 - FCFS, RR, Best-fit and Worst-fit AlgorithmsDokument10 SeitenOS Lab 4 - FCFS, RR, Best-fit and Worst-fit Algorithmstrung duc buiNoch keine Bewertungen
- APA Style and Research Report WritingDokument151 SeitenAPA Style and Research Report WritingEnos LolangNoch keine Bewertungen
- Signals and Systems 1Dokument30 SeitenSignals and Systems 1Rakesh Inani100% (1)
- PS1 08-SolutionDokument7 SeitenPS1 08-SolutionNguyễn Vũ Quang Thành100% (1)
- Teaching Thinking Without Teaching KnowledgeDokument8 SeitenTeaching Thinking Without Teaching KnowledgeEnos LolangNoch keine Bewertungen
- Chapter 10 - Eigenvalues and EigenvectorsDokument16 SeitenChapter 10 - Eigenvalues and EigenvectorsEnos Lolang100% (6)
- Truong Dai Hoc Bach Khoa TPDokument65 SeitenTruong Dai Hoc Bach Khoa TPChí QuốcNoch keine Bewertungen
- Rhodes Solutions Ch4Dokument19 SeitenRhodes Solutions Ch4Joson Chai100% (4)
- MATLAB Solves Differential EquationsDokument6 SeitenMATLAB Solves Differential EquationsDương Quang KhánhNoch keine Bewertungen
- Giai Tich 2 Nam2017 Nhom 6Dokument3 SeitenGiai Tich 2 Nam2017 Nhom 6huongNoch keine Bewertungen
- HCMC Univ MATLAB Calculus 2TITLE Group Project Solves Extrema ProblemsTITLE MATLAB Used to Find Function ExtremaDokument57 SeitenHCMC Univ MATLAB Calculus 2TITLE Group Project Solves Extrema ProblemsTITLE MATLAB Used to Find Function Extremateruaki ogawaNoch keine Bewertungen
- FRP C & DS DumpsDokument627 SeitenFRP C & DS DumpsKiranraj DcNoch keine Bewertungen
- Structures: Short AnswerDokument11 SeitenStructures: Short AnswerKhải NguyễnNoch keine Bewertungen
- HW Ông VinhDokument8 SeitenHW Ông VinhQuốc Thắng NguyễnNoch keine Bewertungen
- Bài Tập Chuyển Đổi Câu Từ Thời Quá Khứ Đơn Sang Câu Dùng Hiện Tại Hoàn Thành Và Ngược LạiDokument2 SeitenBài Tập Chuyển Đổi Câu Từ Thời Quá Khứ Đơn Sang Câu Dùng Hiện Tại Hoàn Thành Và Ngược LạiNguyễn Hoài Thương100% (1)
- Practice test: Nguyễn Lâm Tường Minh 1/1 pt 996 998Dokument23 SeitenPractice test: Nguyễn Lâm Tường Minh 1/1 pt 996 998Kim Anh NguyễnNoch keine Bewertungen
- Predator Prey ModelDokument11 SeitenPredator Prey ModelHiren PatelNoch keine Bewertungen
- Tích phân phụ thuộc tham sốDokument42 SeitenTích phân phụ thuộc tham sốchuong01Noch keine Bewertungen
- Newton Cotes in MATLABDokument2 SeitenNewton Cotes in MATLABVicky Lavinia IINoch keine Bewertungen
- Convolutional Neural Networks: Computer VisionDokument41 SeitenConvolutional Neural Networks: Computer VisionThànhĐạt NgôNoch keine Bewertungen
- Danang University of Science and Technology: Instructor: Nguyen Tri Bang Class: 15ECE2 Group Members: Vo Hoang ChuongDokument12 SeitenDanang University of Science and Technology: Instructor: Nguyen Tri Bang Class: 15ECE2 Group Members: Vo Hoang ChuongBin BinNoch keine Bewertungen
- DE2 Pin AssignmentsDokument8 SeitenDE2 Pin Assignmentstuandt5Noch keine Bewertungen
- Nmos180 LibDokument2 SeitenNmos180 LibKaramveer SinghNoch keine Bewertungen
- DLD Lab#01Dokument6 SeitenDLD Lab#01Zoya KhanNoch keine Bewertungen
- Numerical Computation Methods Problem Set 19.1 SolutionsDokument2 SeitenNumerical Computation Methods Problem Set 19.1 Solutionsmuh arfani asraNoch keine Bewertungen
- Baitap Vidu DFS BFSDokument167 SeitenBaitap Vidu DFS BFSHoàng Duy VũNoch keine Bewertungen
- Adaptive Control Theory: Pole-Placement and Indirect STRDokument48 SeitenAdaptive Control Theory: Pole-Placement and Indirect STRThanh NguyenNoch keine Bewertungen
- Numerical+Analysis+Chapter+3 2Dokument12 SeitenNumerical+Analysis+Chapter+3 2Mudassir HussainNoch keine Bewertungen
- Quiz 3 Solution (No 1-4)Dokument3 SeitenQuiz 3 Solution (No 1-4)irhamNoch keine Bewertungen
- DE2 115 Pin AssignmentDokument4 SeitenDE2 115 Pin AssignmentKamal HaydarNoch keine Bewertungen
- Gyroscope LED Controller STM32F407 DiscoveryDokument21 SeitenGyroscope LED Controller STM32F407 DiscoveryAndrei GeorgeNoch keine Bewertungen
- IIR Filter Design Problems and SolutionsDokument21 SeitenIIR Filter Design Problems and Solutionskhrid3100% (2)
- Lab00Dokument14 SeitenLab00Tiến Đạt NghiêmNoch keine Bewertungen
- Bai Thi KTMT k16Dokument12 SeitenBai Thi KTMT k16Trinh Hoang PhucNoch keine Bewertungen
- MIPS Reference Data CardDokument2 SeitenMIPS Reference Data CardPaulo Cesar GoncalvesNoch keine Bewertungen
- GenPhysLabs ENTotal2017Dokument82 SeitenGenPhysLabs ENTotal2017HUY LÊ MINHNoch keine Bewertungen
- Integral Table PDFDokument14 SeitenIntegral Table PDFAzTaurRivaiNoch keine Bewertungen
- LAB 4: AVL Tree and Heap EX5:: Delete On AVL Tree Insert Remove (Replace by The Maximum Left Node)Dokument26 SeitenLAB 4: AVL Tree and Heap EX5:: Delete On AVL Tree Insert Remove (Replace by The Maximum Left Node)Cao Minh QuangNoch keine Bewertungen
- Exam 2004Dokument20 SeitenExam 2004kib6707Noch keine Bewertungen
- Tutorial 6 - CT Fourier Transform (Solutions) PDFDokument9 SeitenTutorial 6 - CT Fourier Transform (Solutions) PDFAna Maria Muñoz GonzalezNoch keine Bewertungen
- Student t Table ValuesDokument2 SeitenStudent t Table ValuesVuong Vu theNoch keine Bewertungen
- Laboratory Manual: Ho Chi Minh City University of Technology Faculty of Computer Science & EngineeringDokument8 SeitenLaboratory Manual: Ho Chi Minh City University of Technology Faculty of Computer Science & EngineeringHuy Minh HoàngNoch keine Bewertungen
- CS225: Data Structures and Programming Principles Homework 3Dokument6 SeitenCS225: Data Structures and Programming Principles Homework 3Minh TrườngNoch keine Bewertungen
- Complex Pole Locations and System TypesDokument2 SeitenComplex Pole Locations and System TypesPham Thanh0% (1)
- UML Questionnaire - : WWW - Win.tue - NL/ Clange/empanada/surveyDokument34 SeitenUML Questionnaire - : WWW - Win.tue - NL/ Clange/empanada/surveyChrizking TianNoch keine Bewertungen
- 2011 Physics 1 Quiz Practice 1 Student AnswersDokument4 Seiten2011 Physics 1 Quiz Practice 1 Student AnswersDinh Quang ThinhNoch keine Bewertungen
- Assignment 3 - DATTV9Dokument13 SeitenAssignment 3 - DATTV9đạt tiêuNoch keine Bewertungen
- Chapter 3 InterpolationDokument16 SeitenChapter 3 InterpolationHABIB RebeiNoch keine Bewertungen
- Largrange 05inp EbookDokument12 SeitenLargrange 05inp EbookTyler DurdenNoch keine Bewertungen
- Interpolation LagrangeDokument10 SeitenInterpolation Lagrangetahiruabdulrahmanbaaba3Noch keine Bewertungen
- Lagrangian Interpolation: After Reading This Chapter, You Should Be Able ToDokument11 SeitenLagrangian Interpolation: After Reading This Chapter, You Should Be Able ToTesfayeNoch keine Bewertungen
- 6-02-Interpolasi LagrangeDokument16 Seiten6-02-Interpolasi LagrangenaufalNoch keine Bewertungen
- Lagrangian Interpolation Rocket VelocityDokument8 SeitenLagrangian Interpolation Rocket VelocityAbdullah IyadNoch keine Bewertungen
- Lagrangian Interpolation: y X X y X y X, X X F X F X X X X FDokument4 SeitenLagrangian Interpolation: y X X y X y X, X X F X F X X X X FGerardoNoch keine Bewertungen
- Mws Gen Inp PPT Lagrange PDFDokument21 SeitenMws Gen Inp PPT Lagrange PDFMuqaddas SarwarNoch keine Bewertungen
- Lecture Notes Seven: Lagrangian InterpolationDokument10 SeitenLecture Notes Seven: Lagrangian InterpolationSamuel Mawutor Gamor100% (1)
- Material Semana 7Dokument18 SeitenMaterial Semana 7Cristian Cueva ChavezNoch keine Bewertungen
- Poisson ProcessDokument104 SeitenPoisson ProcesssobanaNoch keine Bewertungen
- Study Unit 2Dokument15 SeitenStudy Unit 2Gontse SempaNoch keine Bewertungen
- Lagrangian InterpolationDokument24 SeitenLagrangian InterpolationManuel GarzaNoch keine Bewertungen
- Lagrangian InterpolationDokument24 SeitenLagrangian InterpolationManuel GarzaNoch keine Bewertungen
- 16 Lagrange MethodDokument19 Seiten16 Lagrange MethodJhoan Marie SaritadoNoch keine Bewertungen
- VBA Programming For ExcelDokument19 SeitenVBA Programming For ExcelalitopanNoch keine Bewertungen
- Curriculum Development in Physics EducationDokument17 SeitenCurriculum Development in Physics EducationEnos LolangNoch keine Bewertungen
- Recurrence RelationDokument64 SeitenRecurrence RelationEnos Lolang100% (1)
- InductionDokument34 SeitenInductionRutendo SedeyaNoch keine Bewertungen
- Gagne, R.M. - Mastery LearningDokument13 SeitenGagne, R.M. - Mastery LearningEnos LolangNoch keine Bewertungen
- Ten Easy Steps in JigsawDokument1 SeiteTen Easy Steps in JigsawEnos LolangNoch keine Bewertungen
- Variation of ConstantsDokument3 SeitenVariation of ConstantsEnos LolangNoch keine Bewertungen
- Bab 6 - Structure and Insight Problem SolvingDokument26 SeitenBab 6 - Structure and Insight Problem SolvingEnos LolangNoch keine Bewertungen
- 08.04 - Runge-Kutta 2nd Order Method For ODEDokument10 Seiten08.04 - Runge-Kutta 2nd Order Method For ODEEnos Lolang100% (1)
- Learning Mathematical SymbolismDokument7 SeitenLearning Mathematical SymbolismEnos Lolang100% (1)
- 08.03 - Runge-Kutta 4th Order Method For ODEDokument7 Seiten08.03 - Runge-Kutta 4th Order Method For ODEEnos Lolang100% (5)
- Fitting A Line To DataDokument8 SeitenFitting A Line To DataEnos LolangNoch keine Bewertungen
- 07.06 - Integrating Discrete FunctionDokument7 Seiten07.06 - Integrating Discrete FunctionEnos LolangNoch keine Bewertungen
- Abstract Algebra - Basic, Polynomials, Galois Theory, Categorial and Commutative AlgebraDokument383 SeitenAbstract Algebra - Basic, Polynomials, Galois Theory, Categorial and Commutative AlgebraEnos Lolang83% (6)
- Cultural Practices and Academic Performance of Blaan Pupils in Sinapulan Elementary SchoolDokument15 SeitenCultural Practices and Academic Performance of Blaan Pupils in Sinapulan Elementary SchoolLorNoch keine Bewertungen
- LP Moral Decision Making EditedDokument3 SeitenLP Moral Decision Making EditedCiana SacdalanNoch keine Bewertungen
- HexaflexDokument10 SeitenHexaflexCharlie Williams100% (1)
- Forum On Special Educational Needs: Phil Dexter Sharon Noseley Sophie FaragDokument14 SeitenForum On Special Educational Needs: Phil Dexter Sharon Noseley Sophie Faragelena biancaNoch keine Bewertungen
- 04-DDD.Assignment 2 frontsheet 2018-2019-đã chuyển đổi PDFDokument21 Seiten04-DDD.Assignment 2 frontsheet 2018-2019-đã chuyển đổi PDFl1111c1anh-5Noch keine Bewertungen
- People v. De Joya dying declaration incompleteDokument1 SeitePeople v. De Joya dying declaration incompletelividNoch keine Bewertungen
- SLE On TeamworkDokument9 SeitenSLE On TeamworkAquino Samuel Jr.Noch keine Bewertungen
- Week C - Fact Vs OpinionDokument7 SeitenWeek C - Fact Vs OpinionCharline A. Radislao100% (1)
- Econometrics IntroductionDokument41 SeitenEconometrics IntroductionRay Vega LugoNoch keine Bewertungen
- 2.1D Diy-Exercises (Questionnaires)Dokument31 Seiten2.1D Diy-Exercises (Questionnaires)Chinito Reel CasicasNoch keine Bewertungen
- Placebo Studies Ritual TheoryDokument10 SeitenPlacebo Studies Ritual Theoryapi-443830029Noch keine Bewertungen
- Human Performance and LimitationsDokument243 SeitenHuman Performance and LimitationsListiyani Ismail100% (2)
- Hannah Money Resume 2Dokument2 SeitenHannah Money Resume 2api-289276737Noch keine Bewertungen
- AREVA Directional Over Current Relay MiCOM P12x en TechDataDokument28 SeitenAREVA Directional Over Current Relay MiCOM P12x en TechDatadeccanelecNoch keine Bewertungen
- Course Outline Physics EducationDokument3 SeitenCourse Outline Physics EducationTrisna HawuNoch keine Bewertungen
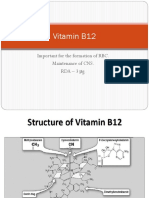
- Vitamin B12: Essential for RBC Formation and CNS MaintenanceDokument19 SeitenVitamin B12: Essential for RBC Formation and CNS MaintenanceHari PrasathNoch keine Bewertungen
- Module 1 Ba Core 11 LessonsDokument37 SeitenModule 1 Ba Core 11 LessonsLolita AlbaNoch keine Bewertungen
- Chapter 1 Notes and ReiewDokument6 SeitenChapter 1 Notes and ReiewTricia Mae Comia AtienzaNoch keine Bewertungen
- Ethical CRM PracticesDokument21 SeitenEthical CRM Practicesanon_522592057Noch keine Bewertungen
- Class 11 English Snapshots Chapter 1Dokument2 SeitenClass 11 English Snapshots Chapter 1Harsh彡Eagle彡Noch keine Bewertungen
- Enterprise Information Management (EIM) : by Katlego LeballoDokument9 SeitenEnterprise Information Management (EIM) : by Katlego LeballoKatlego LeballoNoch keine Bewertungen
- Existentialism Is A HumanismDokument4 SeitenExistentialism Is A HumanismAlex MendezNoch keine Bewertungen
- GNED 500 Social AnalysisDokument2 SeitenGNED 500 Social AnalysisEshita SinhaNoch keine Bewertungen
- As 3778.6.3-1992 Measurement of Water Flow in Open Channels Measuring Devices Instruments and Equipment - CalDokument7 SeitenAs 3778.6.3-1992 Measurement of Water Flow in Open Channels Measuring Devices Instruments and Equipment - CalSAI Global - APACNoch keine Bewertungen
- Challengue 2 Simpe P.P TenseDokument7 SeitenChallengue 2 Simpe P.P TenseAngel AngelNoch keine Bewertungen