Das könnte Ihnen auch gefallen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Journal of Alloys and Compounds: Wei Li, Zhijun Xu, Ruiqing Chu, Peng Fu, Guozhong ZangDokument4 SeitenJournal of Alloys and Compounds: Wei Li, Zhijun Xu, Ruiqing Chu, Peng Fu, Guozhong ZangSamah SamahNoch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- JY01 V3.5 2018-EnglishDokument12 SeitenJY01 V3.5 2018-Englishveerakumars100% (1)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5795)
- Application Manua: RX-8801SA/JEDokument34 SeitenApplication Manua: RX-8801SA/JEildefonsoNoch keine Bewertungen
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Edc QB Final LatestDokument15 SeitenEdc QB Final LatestrajeshadktNoch keine Bewertungen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Vlsi SyllabusDokument3 SeitenVlsi SyllabusmadhurNoch keine Bewertungen
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
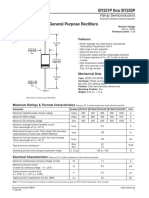
- BY251P Thru BY255P: FeaturesDokument2 SeitenBY251P Thru BY255P: Featureskwagga125Noch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Band Theory-1 PDFDokument65 SeitenBand Theory-1 PDFKamaljit RajkumarNoch keine Bewertungen
- Electrical Fault FindingDokument4 SeitenElectrical Fault FindingAlexTrantranBertranNoch keine Bewertungen
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- (Dennis L. Feucht) Transistor Amplifiers PDFDokument439 Seiten(Dennis L. Feucht) Transistor Amplifiers PDFspyeagleNoch keine Bewertungen
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Quotation CT PT VCB SF6 HT Panel Isolator DO Fuse Set AB Switch Horn Gap Transmission LineDokument11 SeitenQuotation CT PT VCB SF6 HT Panel Isolator DO Fuse Set AB Switch Horn Gap Transmission LineShokautNoch keine Bewertungen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Koehler ADokument126 SeitenKoehler AKavita UpadhyayNoch keine Bewertungen
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Seminar Presentation ONDokument16 SeitenSeminar Presentation ONanon_486451846Noch keine Bewertungen
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Chapter8 CompleteDokument39 SeitenChapter8 CompletegrieverslhNoch keine Bewertungen
- Physics Semiconductors Project PDFDokument25 SeitenPhysics Semiconductors Project PDFAman BindNoch keine Bewertungen
- Furneaux Riddall Catalogue 2017Dokument120 SeitenFurneaux Riddall Catalogue 2017Martin SmithNoch keine Bewertungen
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- MEMRISTOR 473 UnsecureDokument32 SeitenMEMRISTOR 473 UnsecureFaiz AhmedNoch keine Bewertungen
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- AIC Selection GuideDokument7 SeitenAIC Selection GuideWerner LouwNoch keine Bewertungen
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- 400kv Substation Training ReportDokument31 Seiten400kv Substation Training ReportShailendra Yadav85% (26)
- Fundamental STADokument47 SeitenFundamental STAsatNoch keine Bewertungen
- CMP Controls Catalogue 2014-15 (English Version)Dokument147 SeitenCMP Controls Catalogue 2014-15 (English Version)John EvangelistaNoch keine Bewertungen
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- EASA Electrical Fundamentals 1Dokument28 SeitenEASA Electrical Fundamentals 1Marty008100% (1)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1091)
- Paper I: Electrical Engineering Syllabus For IES ExamDokument9 SeitenPaper I: Electrical Engineering Syllabus For IES ExamSrinivasu RajuNoch keine Bewertungen
- Successive Approximation ADC - ECE TutorialsDokument5 SeitenSuccessive Approximation ADC - ECE Tutorialsbraddlely nyakatangureNoch keine Bewertungen
- DatasheetDokument86 SeitenDatasheetOnsirin N NuchsopaNoch keine Bewertungen
- RF Device DataDokument1.388 SeitenRF Device Datasergecheshut100% (2)
- MultiCore ArchitectureDokument44 SeitenMultiCore ArchitectureNabendu Karmakar100% (2)
- Another Simple MK484 RadioDokument2 SeitenAnother Simple MK484 Radiorftek100% (2)
- Alstom Grid - Bushings - PNO LIGHT - UK - WEB PDFDokument8 SeitenAlstom Grid - Bushings - PNO LIGHT - UK - WEB PDFjtcool74Noch keine Bewertungen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- LNK304 PDFDokument20 SeitenLNK304 PDFnourtal2013Noch keine Bewertungen
- CastingDokument56 SeitenCastingTushar Prakash ChaudhariNoch keine Bewertungen
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)