Das könnte Ihnen auch gefallen
- Guia de Aprendizaje Conservacion de Recursos NaturalesDokument7 SeitenGuia de Aprendizaje Conservacion de Recursos Naturalesdairo100% (6)
- Practica de Compresión A MorterosDokument18 SeitenPractica de Compresión A MorterosLuis Flores100% (2)
- Haccp Alimento BalanceadoDokument319 SeitenHaccp Alimento BalanceadoSAPIENSPUCALLPA60% (5)
- Ejercicios y Examenes de Algebra LinealDokument44 SeitenEjercicios y Examenes de Algebra LinealMiguel Flores93% (29)
- Vectores en R3Dokument12 SeitenVectores en R3Miguel Flores100% (33)
- Lab 15 - Clases y Objetos Chayña Huaman Carlos DanielDokument13 SeitenLab 15 - Clases y Objetos Chayña Huaman Carlos Danieldaniel torresNoch keine Bewertungen
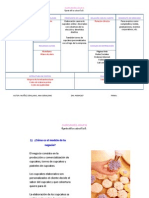
- Canvas CupcakesDokument7 SeitenCanvas CupcakesAna Muñoz Sevillano100% (2)
- BPM Ecuador Tesis PDFDokument197 SeitenBPM Ecuador Tesis PDFMagu BumoNoch keine Bewertungen
- TPM TesisDokument65 SeitenTPM TesisMagu BumoNoch keine Bewertungen
- Reglamento Regimen Academico Codificado Dic2014 PDFDokument46 SeitenReglamento Regimen Academico Codificado Dic2014 PDFDiegoDonoso50% (2)
- Catalogo de Publicaciones 2016 PDFDokument138 SeitenCatalogo de Publicaciones 2016 PDFMagu BumoNoch keine Bewertungen
- Guía de Prácticas Ambientales - Mecánicas Lubricadoras y LavadorasDokument24 SeitenGuía de Prácticas Ambientales - Mecánicas Lubricadoras y Lavadorassisapakari100% (1)
- TRIGLICOL I7ohdlm0Dokument1 SeiteTRIGLICOL I7ohdlm0Magu BumoNoch keine Bewertungen
- Especificacion Hojuelas BananoDokument2 SeitenEspecificacion Hojuelas BananoMagu BumoNoch keine Bewertungen
- Ponencia Román Soria Mesa Redonda REACESDokument6 SeitenPonencia Román Soria Mesa Redonda REACESJPaolaVillaNoch keine Bewertungen
- T Ucsg Pos Mde 3 PDFDokument87 SeitenT Ucsg Pos Mde 3 PDFMagu BumoNoch keine Bewertungen
- Estatal Formato Anteproy Trab TitulacionDokument4 SeitenEstatal Formato Anteproy Trab TitulacionMagu BumoNoch keine Bewertungen
- Modelo CANVASDokument2 SeitenModelo CANVASMagu BumoNoch keine Bewertungen
- Modelo CANVASDokument2 SeitenModelo CANVASMagu BumoNoch keine Bewertungen
- Manual de Google AdwordsDokument187 SeitenManual de Google Adwordsjuanpablo.gigante9812Noch keine Bewertungen
- Implementación de 5S PDFDokument200 SeitenImplementación de 5S PDFMagu BumoNoch keine Bewertungen
- C 05 03 Tiburones PDFDokument2 SeitenC 05 03 Tiburones PDFMagu BumoNoch keine Bewertungen
- 16Dokument36 Seiten16Cesitar RomanNoch keine Bewertungen
- Boletin ELE EmprendedoresDokument17 SeitenBoletin ELE EmprendedoresJaviera RojasNoch keine Bewertungen
- BPM 2 Extranjera PDFDokument95 SeitenBPM 2 Extranjera PDFMagu BumoNoch keine Bewertungen
- BPMs Ecuatorianas DECRETO 3253Dokument24 SeitenBPMs Ecuatorianas DECRETO 3253Carmy Arroba BuenañoNoch keine Bewertungen
- IONES Más ComunesDokument1 SeiteIONES Más ComunesStanleyGrandallNoch keine Bewertungen
- 03 - Anexo Tabla DensidadesDokument2 Seiten03 - Anexo Tabla Densidadesjim130Noch keine Bewertungen
- TICs Cambio Matriz Productiva PDFDokument14 SeitenTICs Cambio Matriz Productiva PDFMagu BumoNoch keine Bewertungen
- Muhammah YunusDokument8 SeitenMuhammah YunusMagu BumoNoch keine Bewertungen
- IONES Más ComunesDokument1 SeiteIONES Más ComunesStanleyGrandallNoch keine Bewertungen
- DensidadesDokument1 SeiteDensidadesDavid Orozco BlancoNoch keine Bewertungen
- Check ListDokument12 SeitenCheck ListJulio Cesar Yauri BlancoNoch keine Bewertungen
- u3EJERCICIO PRACTICO 4Dokument27 Seitenu3EJERCICIO PRACTICO 4Vany LozanoNoch keine Bewertungen
- Desarrollo y Valoración de La MarchaDokument11 SeitenDesarrollo y Valoración de La MarchayocondaariasNoch keine Bewertungen
- Lab. FisicaDokument14 SeitenLab. FisicaYaneivys Gámez IbarraNoch keine Bewertungen
- Cadmo y HarmoníaDokument21 SeitenCadmo y HarmoníaLorena SotoNoch keine Bewertungen
- Modelo de Estilos de Aprendizaje de Felder y SilvermanDokument7 SeitenModelo de Estilos de Aprendizaje de Felder y SilvermanJeannette CañutaNoch keine Bewertungen
- Instructivo Basico para Protocolo - OK PDFDokument12 SeitenInstructivo Basico para Protocolo - OK PDFMarisz MonroyNoch keine Bewertungen
- Como Tomar GuacoDokument3 SeitenComo Tomar GuacorogercopaNoch keine Bewertungen
- Empresas Quiebra Supermercado GuatemalaDokument2 SeitenEmpresas Quiebra Supermercado GuatemalaYesus EspinozaNoch keine Bewertungen
- (IPOO) ProyectoDokument4 Seiten(IPOO) Proyectojuan manuel urbano torresNoch keine Bewertungen
- Formatos Excel UshayDokument20 SeitenFormatos Excel UshayJohita Núñez MenesesNoch keine Bewertungen
- Procedimiento Vaciado de ConcretoDokument9 SeitenProcedimiento Vaciado de ConcretoJonathan Delgado RengifoNoch keine Bewertungen
- Boletin Tema 5Dokument2 SeitenBoletin Tema 5manu regueiroNoch keine Bewertungen
- Incapacidad ValentinaDokument1 SeiteIncapacidad Valentinakarol fajardoNoch keine Bewertungen
- Conestastcion de La demadna-LABORALDokument19 SeitenConestastcion de La demadna-LABORALNELIDA LUNA ECHEVARRIANoch keine Bewertungen
- 2° Grado - Junio 26Dokument26 Seiten2° Grado - Junio 26Marisol Monsalve SanchezNoch keine Bewertungen
- Examen de Tasaciones y Peritaciones PDFDokument2 SeitenExamen de Tasaciones y Peritaciones PDFchicopreuNoch keine Bewertungen
- CRUCERO DESDE LA ROMANA 26 & 29 de EneroDokument3 SeitenCRUCERO DESDE LA ROMANA 26 & 29 de EneroMartin De LeoNoch keine Bewertungen
- 11-20 AZUL CIELO MinificciónDokument5 Seiten11-20 AZUL CIELO MinificciónLilian E. FloresNoch keine Bewertungen
- Unidad3 GestionDokument8 SeitenUnidad3 GestionMario JimenezNoch keine Bewertungen
- Algunas Recomendaciones Elevadores - CatalogoDokument42 SeitenAlgunas Recomendaciones Elevadores - Catalogomiguel angel castro contrerasNoch keine Bewertungen
- Guia 4Dokument12 SeitenGuia 4XicoVascoZambranoNoch keine Bewertungen
- Clasificación de Plantas TrepadorasDokument2 SeitenClasificación de Plantas TrepadorasheidyNoch keine Bewertungen
- Holocaust oDokument4 SeitenHolocaust oALVAREZ CAMARA VALERIA ASUNCIÓNNoch keine Bewertungen
- Catalogo 2022Dokument28 SeitenCatalogo 2022Yuldor GutierrezNoch keine Bewertungen
- LABORATORIO 10 - Sist Secuencial - Flip FlopDokument10 SeitenLABORATORIO 10 - Sist Secuencial - Flip FlopJair Huapaya ParionaNoch keine Bewertungen
- Carta Del Personal Clave RESIDENTEDokument1 SeiteCarta Del Personal Clave RESIDENTEEdinson SánchezNoch keine Bewertungen
- Examen Nombre Jorge Ivan Lozano Belmontes 2a Mi PDFDokument7 SeitenExamen Nombre Jorge Ivan Lozano Belmontes 2a Mi PDFJosé Luis-099 EspartanNoch keine Bewertungen