Das könnte Ihnen auch gefallen
- Kinetic Chain Exercises - Open Versus ClosedDokument4 SeitenKinetic Chain Exercises - Open Versus Closedamirreza jmNoch keine Bewertungen
- The Role of Core StabilityDokument11 SeitenThe Role of Core StabilitykevintriyaNoch keine Bewertungen
- 1987 Nissan Stanza Wiring DiagramDokument36 Seiten1987 Nissan Stanza Wiring DiagramD154RR4YNoch keine Bewertungen
- Bio Mechanics of JumpingDokument4 SeitenBio Mechanics of JumpingcolumbuNoch keine Bewertungen
- Functional Exercise ProgressionDokument6 SeitenFunctional Exercise ProgressionAnastasia Skamagki100% (1)
- Gait Cycle: Back To TopDokument36 SeitenGait Cycle: Back To TopNeha NarulaNoch keine Bewertungen
- Proprioception in Musculoskeletal Rehabilitation. Part 2: Clinical Assessment and InterventionDokument10 SeitenProprioception in Musculoskeletal Rehabilitation. Part 2: Clinical Assessment and InterventionAlejandra VasquezNoch keine Bewertungen
- Squat BiomechanicsDokument11 SeitenSquat BiomechanicsMarcelopablo7Noch keine Bewertungen
- tkr305p 20201101Dokument1 Seitetkr305p 20201101Nicolas, Charles Franz ConradNoch keine Bewertungen
- Adolescent Idiopathic ScoliosisDokument42 SeitenAdolescent Idiopathic ScoliosisPerjalanan SukarNoch keine Bewertungen
- A Technical Description of The Pull in WeightliftingDokument7 SeitenA Technical Description of The Pull in WeightliftingpluckypuckNoch keine Bewertungen
- Relationships Between Ground Reaction Impulse And.2Dokument6 SeitenRelationships Between Ground Reaction Impulse And.2Andrew ShirekNoch keine Bewertungen
- Normal Biomechanics of Human Movement Sit To StandDokument4 SeitenNormal Biomechanics of Human Movement Sit To StandTafzz Sailo100% (1)
- Jonathan Perez - Muscle Gain Truths ExposedDokument115 SeitenJonathan Perez - Muscle Gain Truths ExposedKrish Malhotra100% (1)
- Walking AidsDokument38 SeitenWalking AidsMurad KurdiNoch keine Bewertungen
- Overhead Throwing: Biomechanics and PathologyDokument7 SeitenOverhead Throwing: Biomechanics and Pathologyrapannika100% (1)
- Diagnostic Value of Five Clinical Tests in Patellofemoral Pain SyndromeDokument9 SeitenDiagnostic Value of Five Clinical Tests in Patellofemoral Pain Syndromesridhar100% (1)
- Gait Analysis 16th JuneDokument40 SeitenGait Analysis 16th JuneNaveen BharatNoch keine Bewertungen
- Normal Pathological GaitDokument45 SeitenNormal Pathological GaitshivnairNoch keine Bewertungen
- Isokinetics Report - Leg Strength Test Results and AnalysisDokument1 SeiteIsokinetics Report - Leg Strength Test Results and Analysis200802588Noch keine Bewertungen
- Core StiffnessMcGill 2015Dokument12 SeitenCore StiffnessMcGill 2015Hugo TintiNoch keine Bewertungen
- Ozolin The Tech of The Sprint StartDokument5 SeitenOzolin The Tech of The Sprint StartZachary LeeNoch keine Bewertungen
- Normal Human LocomotionDokument16 SeitenNormal Human LocomotionWendy NgNoch keine Bewertungen
- Jakarta School of Prosthetics & Orthotics: Upper Limb Prosthetics Course Work Manual 2010Dokument84 SeitenJakarta School of Prosthetics & Orthotics: Upper Limb Prosthetics Course Work Manual 2010Adinda Dinda100% (1)
- Bosco Jump CalculationsDokument7 SeitenBosco Jump CalculationsRichard AndersonNoch keine Bewertungen
- Exercise 2 Activity 3 Muscle SummationDokument13 SeitenExercise 2 Activity 3 Muscle SummationElvira BasilioNoch keine Bewertungen
- Jaspal R Singh, M.D.: Department of Rehabilitation MedicineDokument2 SeitenJaspal R Singh, M.D.: Department of Rehabilitation MedicineshikhaNoch keine Bewertungen
- VO2Dokument24 SeitenVO2alfredoibcNoch keine Bewertungen
- How to Use Plug In GaitDokument70 SeitenHow to Use Plug In GaitJobin VargheseNoch keine Bewertungen
- Case Study: Mulligan Concept Management of "Tennis Elbow"Dokument3 SeitenCase Study: Mulligan Concept Management of "Tennis Elbow"noonoons100% (1)
- The Single Leg Squat Test in The Assessment of Musculoskeletal FunctionDokument6 SeitenThe Single Leg Squat Test in The Assessment of Musculoskeletal FunctionPrayogi Dwina AnggaNoch keine Bewertungen
- EMG in Weightlifting Performance During The SnatchDokument5 SeitenEMG in Weightlifting Performance During The SnatchsafaaismaeelNoch keine Bewertungen
- (OS 203) Basic Biomechanics of Musculoskeletal System PDFDokument3 Seiten(OS 203) Basic Biomechanics of Musculoskeletal System PDFSham David PTNoch keine Bewertungen
- Rom PDFDokument6 SeitenRom PDFPrivat EtavirpNoch keine Bewertungen
- Effect of Age On Task Complexity, Exercise and Ambulation: Group 8Dokument17 SeitenEffect of Age On Task Complexity, Exercise and Ambulation: Group 8PreciousShaizNoch keine Bewertungen
- Otot-Otot Hip: Sari Tri Yulianti, S.FT., M.BiomedDokument39 SeitenOtot-Otot Hip: Sari Tri Yulianti, S.FT., M.Biomedkim mingyuNoch keine Bewertungen
- Effect of Plyometrics and Resistance Training on Basketball Players' Bio-Motor AbilitiesDokument4 SeitenEffect of Plyometrics and Resistance Training on Basketball Players' Bio-Motor AbilitieserwinewinewinkNoch keine Bewertungen
- PWC170 Test Estimates Aerobic FitnessDokument3 SeitenPWC170 Test Estimates Aerobic FitnessSoya Asakura0% (1)
- Biomechanics of The Knee During Closed Kinetic Chain and Open KineticDokument17 SeitenBiomechanics of The Knee During Closed Kinetic Chain and Open KineticArmando NetoNoch keine Bewertungen
- Short-Term High Intensity Plyometric Training Program Improves Strength, Power and Agility in Male Soccer PlayersDokument10 SeitenShort-Term High Intensity Plyometric Training Program Improves Strength, Power and Agility in Male Soccer PlayersChristine ViolaNoch keine Bewertungen
- Physiotherapy in Disaster MenegementDokument82 SeitenPhysiotherapy in Disaster MenegementAtiKa YuLiantiNoch keine Bewertungen
- Limiting Factors in Lumbar Spine MotionDokument9 SeitenLimiting Factors in Lumbar Spine MotionAni Fran SolarNoch keine Bewertungen
- CKC vs OKC Exercises - Functional Strength TrainingDokument2 SeitenCKC vs OKC Exercises - Functional Strength Traininginrmpt77Noch keine Bewertungen
- Eccentric Vs Concentric Training Muscle GrowthDokument8 SeitenEccentric Vs Concentric Training Muscle GrowthAres Santiago R. NoguedaNoch keine Bewertungen
- Motor Learning Applications For Agility Pt2Dokument5 SeitenMotor Learning Applications For Agility Pt2hmimezNoch keine Bewertungen
- Dutch Osteoarthritis of The Hip and Knee Physiotherapy GuidelinesDokument29 SeitenDutch Osteoarthritis of The Hip and Knee Physiotherapy GuidelinesyohanNoch keine Bewertungen
- Understanding and Managing Chronic Wounds: Jasmine Kartiko Pertiwi Jurusan Fisioterapi Poltekkes Kemenkes SurakartaDokument13 SeitenUnderstanding and Managing Chronic Wounds: Jasmine Kartiko Pertiwi Jurusan Fisioterapi Poltekkes Kemenkes Surakartaamarilis sekarNoch keine Bewertungen
- Aragon (2000) Evaluation of Four Vertical Jump Tests - Methodology, Reliability, Validity and Accuracy.Dokument16 SeitenAragon (2000) Evaluation of Four Vertical Jump Tests - Methodology, Reliability, Validity and Accuracy.linoco1Noch keine Bewertungen
- PNF Techniques for Strengthening MusclesDokument76 SeitenPNF Techniques for Strengthening MusclesHasan KhawaldehNoch keine Bewertungen
- Chest Depth CaliperDokument4 SeitenChest Depth CaliperRoi Albert BarteNoch keine Bewertungen
- Tidow 110 H ModelDokument20 SeitenTidow 110 H ModelZachary Lee100% (1)
- Gait BiomechDokument77 SeitenGait BiomechVidhya anand MNoch keine Bewertungen
- Chiu2014 - Proximal-To-distal Sequencing in Vertical Jumping With and Without Arm SwingDokument8 SeitenChiu2014 - Proximal-To-distal Sequencing in Vertical Jumping With and Without Arm SwingFelipe TeixeiraNoch keine Bewertungen
- Articulo KinesiofobiaDokument7 SeitenArticulo KinesiofobiaxspmNoch keine Bewertungen
- Faradic CurrentDokument38 SeitenFaradic CurrentCHANDAN RAINoch keine Bewertungen
- A Kinetic Chain Approach For Shoulder RehabDokument9 SeitenA Kinetic Chain Approach For Shoulder RehabRicardo QuezadaNoch keine Bewertungen
- 2.08 Brachial Region (Arm) - Compartments, Muscles, Nerves, and VesselsDokument3 Seiten2.08 Brachial Region (Arm) - Compartments, Muscles, Nerves, and VesselsDi CanNoch keine Bewertungen
- Measure Joint Range of Motion (ROMDokument5 SeitenMeasure Joint Range of Motion (ROMNinoe CueyNoch keine Bewertungen
- Golf Swing BiomechanicsDokument3 SeitenGolf Swing Biomechanicsapi-282290655Noch keine Bewertungen
- Forward LungeDokument7 SeitenForward LungeJune Nicca MedinaNoch keine Bewertungen
- Lumbar Stability PDFDokument9 SeitenLumbar Stability PDFPablo EstebanNoch keine Bewertungen
- Bizgram 27tht Auguast 2015 PricelistDokument4 SeitenBizgram 27tht Auguast 2015 Pricelistj1khor4154Noch keine Bewertungen
- Atomic SpectraDokument2 SeitenAtomic Spectraj1khor4154Noch keine Bewertungen
- Simple MeasurementsDokument2 SeitenSimple Measurementsj1khor4154Noch keine Bewertungen
- Nyjc - My2007 p1 SolutionDokument10 SeitenNyjc - My2007 p1 Solutionj1khor4154Noch keine Bewertungen
- 0 CoverDokument5 Seiten0 CoverDul ErdenebilegNoch keine Bewertungen
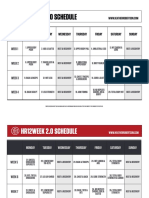
- HR 12 Week ProgramDokument4 SeitenHR 12 Week ProgramMarcela GarciaNoch keine Bewertungen
- Present Simple vs Present ContinuousDokument4 SeitenPresent Simple vs Present ContinuousaticemalikNoch keine Bewertungen
- Marketing Plan FinalDokument28 SeitenMarketing Plan Finalapi-250564112Noch keine Bewertungen
- MERIDA Bikes Catalogue 2017 INT Web PDFDokument228 SeitenMERIDA Bikes Catalogue 2017 INT Web PDFSan Ban CastroNoch keine Bewertungen
- Land Transport Motorcycles Yamaha, Honda, SuzukiDokument13 SeitenLand Transport Motorcycles Yamaha, Honda, SuzukiYa BekeleNoch keine Bewertungen
- RFP 28 Day Pilates Challenge 2024Dokument1 SeiteRFP 28 Day Pilates Challenge 2024Carol ChanNoch keine Bewertungen
- Argonaut Bogie Spare Parts ListingDokument8 SeitenArgonaut Bogie Spare Parts ListingAgus YulfizarNoch keine Bewertungen
- 3v3 Basketball Rules GuideDokument3 Seiten3v3 Basketball Rules GuideMark Anthony AnaretaNoch keine Bewertungen
- San Luis 2005 InterviewDokument7 SeitenSan Luis 2005 Interviewmarcio soaresNoch keine Bewertungen
- Quantum Cat: An Aberration That Defies Space and TimeDokument2 SeitenQuantum Cat: An Aberration That Defies Space and TimempotatoNoch keine Bewertungen
- Loves Theme. Barry White-Corno en FaDokument1 SeiteLoves Theme. Barry White-Corno en FaJorge Antonio Barajas GuerreroNoch keine Bewertungen
- Everything You Need to Know About Arnis: A Concise GuideDokument13 SeitenEverything You Need to Know About Arnis: A Concise GuideKristelle C. MarquezNoch keine Bewertungen
- MISSION WS 600 Pump Spec SheetDokument2 SeitenMISSION WS 600 Pump Spec SheetFaroukNoch keine Bewertungen
- Indian Standard: (Fourth Revision)Dokument33 SeitenIndian Standard: (Fourth Revision)Dipankar ChakrabortyNoch keine Bewertungen
- 2023 Hyundai Staria Premium - SolaireDokument3 Seiten2023 Hyundai Staria Premium - SolaireLucy BarbaronaNoch keine Bewertungen
- Escape the Alien Craft - Rules for Abduction Card GameDokument2 SeitenEscape the Alien Craft - Rules for Abduction Card GameRafael Simião OliveiraNoch keine Bewertungen
- BD 2022.periodo BD 2022.cedula BD 2022.nombre Horas 059Dokument24 SeitenBD 2022.periodo BD 2022.cedula BD 2022.nombre Horas 059ejbohorqNoch keine Bewertungen
- Get Free Spins Get Free Coins Coin Master GeneratorDokument3 SeitenGet Free Spins Get Free Coins Coin Master GeneratorNathaniel YukihiroNoch keine Bewertungen
- Example 021Dokument3 SeitenExample 021JurekNoch keine Bewertungen
- 1616 ToDokument4 Seiten1616 TohamzajmorshedNoch keine Bewertungen
- Gold Medal Heights - SL TYPE 2Dokument23 SeitenGold Medal Heights - SL TYPE 2Guillermo EsquedaNoch keine Bewertungen
- Unethical AdDokument10 SeitenUnethical AdBainsHarpreetNoch keine Bewertungen
- Current Affairs MCQ Ebbok Part-1Dokument16 SeitenCurrent Affairs MCQ Ebbok Part-1azmalkandiNoch keine Bewertungen
- Resident Evil 4 - Wii Edition (USA) (En, De)Dokument5 SeitenResident Evil 4 - Wii Edition (USA) (En, De)Valentino RaynaldiNoch keine Bewertungen
- Efectos de Una Dieta Hipocalórica PDFDokument6 SeitenEfectos de Una Dieta Hipocalórica PDFGertru Vargas MolinaNoch keine Bewertungen
- Descripcion y Operacion Del Sistema de Frenos Mazda Protege 1997Dokument30 SeitenDescripcion y Operacion Del Sistema de Frenos Mazda Protege 1997gerber damianNoch keine Bewertungen