Das könnte Ihnen auch gefallen
- rr322403 RoboticsDokument5 Seitenrr322403 RoboticsSRINIVASA RAO GANTANoch keine Bewertungen
- Set No. 1Dokument7 SeitenSet No. 1Puru GaurNoch keine Bewertungen
- Rr420305 RoboticsDokument7 SeitenRr420305 RoboticsandhracollegesNoch keine Bewertungen
- RR 410308 RoboticsDokument4 SeitenRR 410308 RoboticsSRINIVASA RAO GANTANoch keine Bewertungen
- rr420305 RoboticsDokument8 Seitenrr420305 RoboticsSRINIVASA RAO GANTANoch keine Bewertungen
- rr321302 Robotics and AutomationDokument5 Seitenrr321302 Robotics and AutomationSRINIVASA RAO GANTANoch keine Bewertungen
- 07 Rr420305-RoboticsDokument6 Seiten07 Rr420305-RoboticsandhracollegesNoch keine Bewertungen
- 4364 524 RoboticsDokument2 Seiten4364 524 Roboticsyogesh_b_kNoch keine Bewertungen
- 9A13701 Robotics and AutomationDokument4 Seiten9A13701 Robotics and AutomationsivabharathamurthyNoch keine Bewertungen
- Seemandhra - Co.in - Robotics-1 - 0Dokument1 SeiteSeemandhra - Co.in - Robotics-1 - 0Samiullah MohammedNoch keine Bewertungen
- r050211301 Instrumentation ComponentsDokument4 Seitenr050211301 Instrumentation ComponentsSrinivasa Rao GNoch keine Bewertungen
- rr420306 Computer GraphicsDokument5 Seitenrr420306 Computer GraphicsSRINIVASA RAO GANTANoch keine Bewertungen
- Rr720305 RoboticsDokument5 SeitenRr720305 RoboticsandhracollegesNoch keine Bewertungen
- Marks I A) Arm. B) of 2 A) B) Motors. 3 A) List B) : KalamDokument2 SeitenMarks I A) Arm. B) of 2 A) B) Motors. 3 A) List B) : KalamKrishnakumar KattarakunnuNoch keine Bewertungen
- RR420305 Robotics PDFDokument9 SeitenRR420305 Robotics PDFSarath ChandraNoch keine Bewertungen
- F F1166 Pages: 2: Answer Any Two Full Questions, Each Carries 15 MarksDokument2 SeitenF F1166 Pages: 2: Answer Any Two Full Questions, Each Carries 15 MarksAndrew JeromiasNoch keine Bewertungen
- R09-Advanced MechanicsDokument1 SeiteR09-Advanced Mechanicssudhakar kNoch keine Bewertungen
- Rr211003 Instrumentation ComponentsDokument5 SeitenRr211003 Instrumentation ComponentsSrinivasa Rao GNoch keine Bewertungen
- Rr410105 Soil Dynamics and Machine FoundationDokument5 SeitenRr410105 Soil Dynamics and Machine FoundationSrinivasa Rao GNoch keine Bewertungen
- RoboticsDokument6 SeitenRoboticsetitahNoch keine Bewertungen
- Rr410208 Computer Aided Design of Electrical MachinesDokument4 SeitenRr410208 Computer Aided Design of Electrical MachinesSrinivasa Rao G100% (1)
- Robotics - Mumbai Univ - Sem 8 ElexDokument8 SeitenRobotics - Mumbai Univ - Sem 8 Elex111ashwin0% (1)
- Rr411402 Product Design and Assembly AutomationDokument4 SeitenRr411402 Product Design and Assembly AutomationSrinivasa Rao GNoch keine Bewertungen
- 07a81002 RoboticsandautomationDokument8 Seiten07a81002 RoboticsandautomationSharanya ThirichinapalliNoch keine Bewertungen
- Rr412104 Experimental Stress AnalysisDokument4 SeitenRr412104 Experimental Stress AnalysisSrinivasa Rao GNoch keine Bewertungen
- Robotics and AutomationDokument4 SeitenRobotics and AutomationTemitayo Olutimi EjidokunNoch keine Bewertungen
- Compiled QB Mech 8thDokument36 SeitenCompiled QB Mech 8thGyanesh RaoNoch keine Bewertungen
- Answer Any Two Full Questions, Each Carries 15 Marks.: Pages: 2Dokument2 SeitenAnswer Any Two Full Questions, Each Carries 15 Marks.: Pages: 2Andrew JeromiasNoch keine Bewertungen
- (MT8701)Dokument2 Seiten(MT8701)Johnson Paul100% (2)
- M.Tech. Degree Examination Machine Design: (Nov-18) (EME-703)Dokument2 SeitenM.Tech. Degree Examination Machine Design: (Nov-18) (EME-703)Abrha HagaziNoch keine Bewertungen
- Por Model Set A PDFDokument2 SeitenPor Model Set A PDFsaravananNoch keine Bewertungen
- rr422301 Chromatographic SeparationsDokument4 Seitenrr422301 Chromatographic SeparationsSRINIVASA RAO GANTANoch keine Bewertungen
- Rocket and Missile Question PaperDokument1 SeiteRocket and Missile Question Paperphani reddyNoch keine Bewertungen
- ME 6401-Kinematics of Machinery ME 6401 - Kinematics of MachineryDokument2 SeitenME 6401-Kinematics of Machinery ME 6401 - Kinematics of MachineryVinoth KumarNoch keine Bewertungen
- Ee2023 Raa Im 2013 PDFDokument4 SeitenEe2023 Raa Im 2013 PDFveerapandianNoch keine Bewertungen
- Metrologyand Surface EngineeringDokument4 SeitenMetrologyand Surface EngineeringshivkrnNoch keine Bewertungen
- Rr411812 X Ray MetallographyDokument5 SeitenRr411812 X Ray MetallographySRINIVASA RAO GANTANoch keine Bewertungen
- Ee - Ii - 1Dokument33 SeitenEe - Ii - 1saurabh1116Noch keine Bewertungen
- BE ElectricalDokument45 SeitenBE ElectricalOmkar SheteNoch keine Bewertungen
- r05320204 Instrumentation May2008Dokument6 Seitenr05320204 Instrumentation May2008prahari7Noch keine Bewertungen
- 3 Hours / 70 Marks: Seat NoDokument4 Seiten3 Hours / 70 Marks: Seat Nobodke818Noch keine Bewertungen
- IntroductiontoRobotics October2018 B E Withcredits RegularCGPAPatternBE 6D61D056Dokument1 SeiteIntroductiontoRobotics October2018 B E Withcredits RegularCGPAPatternBE 6D61D056sumitNoch keine Bewertungen
- Robotics TopicsDokument3 SeitenRobotics TopicsSerat RahmanNoch keine Bewertungen
- S 4933 B.E/B.Tech., Degree Examination, April/May 2004Dokument2 SeitenS 4933 B.E/B.Tech., Degree Examination, April/May 2004Jayaprakash JayaramanNoch keine Bewertungen
- rr210302 Basic ElectronicsDokument4 Seitenrr210302 Basic ElectronicsSrinivasa Rao GNoch keine Bewertungen
- 2015-16 PART-1/REGULAR 2015-16 PART-1/BTECH 2015-16 Part-I/btech Etc - 1359R&ADokument2 Seiten2015-16 PART-1/REGULAR 2015-16 PART-1/BTECH 2015-16 Part-I/btech Etc - 1359R&Amovies kidaNoch keine Bewertungen
- Special MachinesDokument2 SeitenSpecial Machinesanon-291988Noch keine Bewertungen
- Rr411402 Product Design and Assembly AutomationDokument5 SeitenRr411402 Product Design and Assembly AutomationSrinivasa Rao GNoch keine Bewertungen
- rr311002 Electronic Equipment DesignDokument4 Seitenrr311002 Electronic Equipment DesignSRINIVASA RAO GANTANoch keine Bewertungen
- r05320106 Transportation EngineeringDokument7 Seitenr05320106 Transportation EngineeringSRINIVASA RAO GANTANoch keine Bewertungen
- Robot Manipulators: Modeling, Performance Analysis and ControlVon EverandRobot Manipulators: Modeling, Performance Analysis and ControlNoch keine Bewertungen
- Classical and Modern Approaches in the Theory of MechanismsVon EverandClassical and Modern Approaches in the Theory of MechanismsNoch keine Bewertungen
- Movement Equations 2: Mathematical and Methodological SupplementsVon EverandMovement Equations 2: Mathematical and Methodological SupplementsNoch keine Bewertungen
- Dynamics and Control of Robotic Manipulators with Contact and FrictionVon EverandDynamics and Control of Robotic Manipulators with Contact and FrictionNoch keine Bewertungen
- GARCH Models: Structure, Statistical Inference and Financial ApplicationsVon EverandGARCH Models: Structure, Statistical Inference and Financial ApplicationsBewertung: 5 von 5 Sternen5/5 (1)
- Planar Linkage Synthesis: A modern CAD based approachVon EverandPlanar Linkage Synthesis: A modern CAD based approachNoch keine Bewertungen
- Irreducible Tensor Methods: An Introduction for ChemistsVon EverandIrreducible Tensor Methods: An Introduction for ChemistsNoch keine Bewertungen
- From Microstructure Investigations to Multiscale Modeling: Bridging the GapVon EverandFrom Microstructure Investigations to Multiscale Modeling: Bridging the GapDelphine BrancherieNoch keine Bewertungen
- r05320403 Microwave EngineeringDokument8 Seitenr05320403 Microwave EngineeringSrinivasa Rao G100% (2)
- 41 Mca or Software EngineeringDokument1 Seite41 Mca or Software EngineeringSrinivasa Rao G100% (1)
- r05320305 Design of Machine Members IIDokument11 Seitenr05320305 Design of Machine Members IISrinivasa Rao G100% (4)
- Switch Gear and ProtectionDokument6 SeitenSwitch Gear and Protectionrajaniram100% (1)
- 42 Mca NR Programming in JavaDokument1 Seite42 Mca NR Programming in JavaSrinivasa Rao GNoch keine Bewertungen
- r6 42 Mca Advanced Java Programming Set1Dokument1 Seiter6 42 Mca Advanced Java Programming Set1Srinivasa Rao G100% (1)
- Rr322305 ImmunologyDokument4 SeitenRr322305 ImmunologySrinivasa Rao GNoch keine Bewertungen
- r5 402 Mba Management of Technology Set1Dokument1 Seiter5 402 Mba Management of Technology Set1Srinivasa Rao G100% (1)
- r6 43 Mca Data Warehousing and Mining Set1Dokument1 Seiter6 43 Mca Data Warehousing and Mining Set1Srinivasa Rao GNoch keine Bewertungen
- 41 Mca NR Software EngineeringDokument1 Seite41 Mca NR Software EngineeringSrinivasa Rao G100% (2)
- 43-Mca-Or-Design and Analysis of AlgorithmDokument1 Seite43-Mca-Or-Design and Analysis of AlgorithmSrinivasa Rao GNoch keine Bewertungen
- r5 401 Mba Strategic Management Set1Dokument1 Seiter5 401 Mba Strategic Management Set1Srinivasa Rao G100% (3)
- 43-Mca-Or-Design and Analysis of AlgorithmDokument1 Seite43-Mca-Or-Design and Analysis of AlgorithmSrinivasa Rao GNoch keine Bewertungen
- r5 401 Mba Strategic Management Set1Dokument1 Seiter5 401 Mba Strategic Management Set1Srinivasa Rao G100% (3)
- NR 302 Mba Cost and Management Accounting Set1Dokument1 SeiteNR 302 Mba Cost and Management Accounting Set1Srinivasa Rao GNoch keine Bewertungen
- Nr-35-Mca-Design and Analysis of AlgorithmDokument2 SeitenNr-35-Mca-Design and Analysis of AlgorithmSrinivasa Rao G100% (1)
- r5 305 Mba Retailing Management Set1Dokument1 Seiter5 305 Mba Retailing Management Set1Srinivasa Rao GNoch keine Bewertungen
- 41 Mca NR Software EngineeringDokument1 Seite41 Mca NR Software EngineeringSrinivasa Rao G100% (2)
- r6 43 Mca Data Warehousing and Mining Set1Dokument1 Seiter6 43 Mca Data Warehousing and Mining Set1Srinivasa Rao GNoch keine Bewertungen
- Or 32 Mcacomputer Communication NetworksDokument1 SeiteOr 32 Mcacomputer Communication NetworksSrinivasa Rao GNoch keine Bewertungen
- NR 305 Mba Retailing Management Set1Dokument1 SeiteNR 305 Mba Retailing Management Set1Srinivasa Rao GNoch keine Bewertungen
- r6 34 Mca Management Information Systems Set1Dokument1 Seiter6 34 Mca Management Information Systems Set1Srinivasa Rao G100% (2)
- r5 304 Mba Enterprise Resource PlanningDokument1 Seiter5 304 Mba Enterprise Resource PlanningSrinivasa Rao GNoch keine Bewertungen
- NR 31 Mca Database Management SystemsDokument1 SeiteNR 31 Mca Database Management SystemsSrinivasa Rao GNoch keine Bewertungen
- r6 47 Mca Distributed Operating Systems Set1Dokument1 Seiter6 47 Mca Distributed Operating Systems Set1Srinivasa Rao GNoch keine Bewertungen
- Or 34 Mca Management Information SystemsDokument1 SeiteOr 34 Mca Management Information SystemsSrinivasa Rao GNoch keine Bewertungen
- r6 48 Mca Mobile Computing Set1Dokument1 Seiter6 48 Mca Mobile Computing Set1Srinivasa Rao GNoch keine Bewertungen
- r6 33 Mca Unix Networks Programming Set1Dokument1 Seiter6 33 Mca Unix Networks Programming Set1Srinivasa Rao GNoch keine Bewertungen
- r5 410 Mba Management of Change Set1Dokument1 Seiter5 410 Mba Management of Change Set1Srinivasa Rao GNoch keine Bewertungen
- r5 408 Mba Decision Support Systems Set1Dokument4 Seitenr5 408 Mba Decision Support Systems Set1Srinivasa Rao GNoch keine Bewertungen
- Puratattva No 41Dokument3 SeitenPuratattva No 41ultimategoonNoch keine Bewertungen
- Standard Dimensions Grooved and Shouldered Joints AMERICAN - The Right WayDokument2 SeitenStandard Dimensions Grooved and Shouldered Joints AMERICAN - The Right WaySopon SrirattanapiboonNoch keine Bewertungen
- Tutorial: MSBA7003 Quantitative Analysis MethodsDokument29 SeitenTutorial: MSBA7003 Quantitative Analysis MethodsAmanda WangNoch keine Bewertungen
- Pre Intermediate Talking ShopDokument4 SeitenPre Intermediate Talking ShopSindy LiNoch keine Bewertungen
- Slipform Construction TechniqueDokument6 SeitenSlipform Construction TechniqueDivyansh NandwaniNoch keine Bewertungen
- 4.1 Hydrostatic Force On Curved Surfaces - CE 309-CE22S2 - Fluid MechanicsDokument4 Seiten4.1 Hydrostatic Force On Curved Surfaces - CE 309-CE22S2 - Fluid MechanicsRUSSELNoch keine Bewertungen
- Sta404 07Dokument71 SeitenSta404 07Ibnu Iyar0% (1)
- Research Paper On N Queen ProblemDokument7 SeitenResearch Paper On N Queen Problemxvrdskrif100% (1)
- Pursuit of Performance Findings From The 2014 Miller Heiman Sales Best Practices StudyDokument37 SeitenPursuit of Performance Findings From The 2014 Miller Heiman Sales Best Practices StudyLoredanaNoch keine Bewertungen
- DC Motor: F Bli NewtonDokument35 SeitenDC Motor: F Bli NewtonMuhammad TausiqueNoch keine Bewertungen
- Gauss' Law: F A FADokument14 SeitenGauss' Law: F A FAValentina DuarteNoch keine Bewertungen
- A12 CanSat Technlology Forclimate Monitoring PDFDokument10 SeitenA12 CanSat Technlology Forclimate Monitoring PDFDany PABON VILLAMIZARNoch keine Bewertungen
- Pressure-Dependent Leak Detection Model and Its Application To A District Water SystemDokument13 SeitenPressure-Dependent Leak Detection Model and Its Application To A District Water SystemManjul KothariNoch keine Bewertungen
- Tree Based Machine Learning Algorithms Decision Trees Random Forests and Boosting B0756FGJCPDokument109 SeitenTree Based Machine Learning Algorithms Decision Trees Random Forests and Boosting B0756FGJCPJulio Davalos Vasquez100% (1)
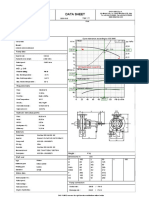
- Data Sheet: Item N°: Curve Tolerance According To ISO 9906Dokument3 SeitenData Sheet: Item N°: Curve Tolerance According To ISO 9906Aan AndianaNoch keine Bewertungen
- FhryhfhfhDokument3 SeitenFhryhfhfhAffan AhmadNoch keine Bewertungen
- Three Revolutionary Architects - Boullee, Ledoux, and Lequeu PDFDokument135 SeitenThree Revolutionary Architects - Boullee, Ledoux, and Lequeu PDFTran LeNoch keine Bewertungen
- 8 Lesson 13 Viking FranceDokument2 Seiten8 Lesson 13 Viking Franceapi-332379661Noch keine Bewertungen
- 22-28 August 2009Dokument16 Seiten22-28 August 2009pratidinNoch keine Bewertungen
- Placa 9 - SHUTTLE A14RV08 - 71R-A14RV4-T840 - REV A0 10ABR2012Dokument39 SeitenPlaca 9 - SHUTTLE A14RV08 - 71R-A14RV4-T840 - REV A0 10ABR2012Sergio GalliNoch keine Bewertungen
- Dady - Piernas LargasDokument12 SeitenDady - Piernas LargasSarha NietoNoch keine Bewertungen
- Feasibility and Optimization of Dissimilar Laser Welding ComponentsDokument366 SeitenFeasibility and Optimization of Dissimilar Laser Welding Componentskaliappan45490Noch keine Bewertungen
- PLASSON UK July 2022 Price Catalogue v1Dokument74 SeitenPLASSON UK July 2022 Price Catalogue v1Jonathan Ninapaytan SanchezNoch keine Bewertungen
- Power - Factor - Correction - LegrandDokument24 SeitenPower - Factor - Correction - LegrandrehanNoch keine Bewertungen
- 2SA1016Dokument4 Seiten2SA1016catalina maryNoch keine Bewertungen
- DYCONEX Materials en 2020 ScreenDokument2 SeitenDYCONEX Materials en 2020 ScreenhhaiddaoNoch keine Bewertungen
- Handbook+for+Participants+ +GCC+TeenDokument59 SeitenHandbook+for+Participants+ +GCC+Teenchloe.2021164Noch keine Bewertungen
- Machine Design REE 302: CH 1: Introduction To Mechanical Engineering DesignDokument26 SeitenMachine Design REE 302: CH 1: Introduction To Mechanical Engineering DesignDull PersonNoch keine Bewertungen
- Gastone Petrini: Strutture e Costruzioni Autarchiche Di Legno in Italia e Colonie Caratteri e CriterDokument9 SeitenGastone Petrini: Strutture e Costruzioni Autarchiche Di Legno in Italia e Colonie Caratteri e CriterPier Pasquale TrausiNoch keine Bewertungen
- Social Science PedagogyDokument4 SeitenSocial Science PedagogyrajendraNoch keine Bewertungen