Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Load Frequency ControlDokument4 SeitenLoad Frequency Controlkumarchaturvedula100% (1)
- Automatic Generation Control (AGC)Dokument22 SeitenAutomatic Generation Control (AGC)maan100% (1)
- Power System Dynamics ETH NoteDokument107 SeitenPower System Dynamics ETH Noteabs4everonline100% (1)
- Study of Structural Behaviour of Gravity Dam With Various Features of Gallery by FEMDokument8 SeitenStudy of Structural Behaviour of Gravity Dam With Various Features of Gallery by FEMIDESNoch keine Bewertungen
- Optimal Placement of DG For Loss Reduction and Voltage Sag Mitigation in Radial Distribution Systems Using ABC AlgorithmDokument6 SeitenOptimal Placement of DG For Loss Reduction and Voltage Sag Mitigation in Radial Distribution Systems Using ABC AlgorithmIDESNoch keine Bewertungen
- Various OSI Layer Attacks and Countermeasure To Enhance The Performance of WSNs During Wormhole AttackDokument6 SeitenVarious OSI Layer Attacks and Countermeasure To Enhance The Performance of WSNs During Wormhole AttackIDESNoch keine Bewertungen
- Rotman Lens Performance AnalysisDokument6 SeitenRotman Lens Performance AnalysisIDESNoch keine Bewertungen
- Opportunities and Challenges of Software CustomizationDokument11 SeitenOpportunities and Challenges of Software CustomizationIDESNoch keine Bewertungen
- Shot Boundary Detection Using Radon Projection MethodDokument5 SeitenShot Boundary Detection Using Radon Projection MethodIDESNoch keine Bewertungen
- Lecture Notes - 17EE81 - Module-3 - AGC (Continued) & AGC in Interconnected Power System - R.gunasekariDokument36 SeitenLecture Notes - 17EE81 - Module-3 - AGC (Continued) & AGC in Interconnected Power System - R.gunasekariMahantheshaNoch keine Bewertungen
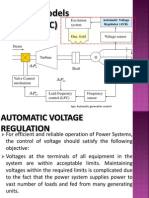
- Automatic Voltage RegulatorDokument27 SeitenAutomatic Voltage RegulatorHarpreet SharmaNoch keine Bewertungen
- Automatic Load Frequency Control of Multi-Area Power System Using ANN Controller and Genetic AlgorithmDokument8 SeitenAutomatic Load Frequency Control of Multi-Area Power System Using ANN Controller and Genetic AlgorithmseventhsensegroupNoch keine Bewertungen
- Power System Iii: Automatic Generation Control (AGC)Dokument54 SeitenPower System Iii: Automatic Generation Control (AGC)31Abhinav AkashNoch keine Bewertungen
- Unit 2: Frequency Control and Automatic Generation ControlDokument20 SeitenUnit 2: Frequency Control and Automatic Generation ControlHartoyoNoch keine Bewertungen
- AGC400 Program DescriptionDokument97 SeitenAGC400 Program DescriptionVon Renier DapanasNoch keine Bewertungen
- Power Control AGC1Dokument35 SeitenPower Control AGC1surya892100% (1)
- Ee 1404 Power System Lab ManualDokument64 SeitenEe 1404 Power System Lab ManualjayamanikandanNoch keine Bewertungen
- Power System Dynamics and StabilityDokument28 SeitenPower System Dynamics and Stability7harma V1swaNoch keine Bewertungen
- PowesSystemStability - Lecture Five - PPTDokument68 SeitenPowesSystemStability - Lecture Five - PPTchalaNoch keine Bewertungen
- ELE8331: Power System Control Automatic Generation Control (AGC)Dokument31 SeitenELE8331: Power System Control Automatic Generation Control (AGC)umarsaboNoch keine Bewertungen
- Automatic Generation Control: FrequencyDokument24 SeitenAutomatic Generation Control: FrequencyMohammedSaadaniHassaniNoch keine Bewertungen
- Md. Abdul Malek: Lecturer, Dept. of Electrical & Electronic Engineering Rajshahi University of Engineering & TechnologyDokument29 SeitenMd. Abdul Malek: Lecturer, Dept. of Electrical & Electronic Engineering Rajshahi University of Engineering & Technologykazi ahadNoch keine Bewertungen
- Power System Operation and Control - Unit-3 PDFDokument14 SeitenPower System Operation and Control - Unit-3 PDFvikram vaidyanathanNoch keine Bewertungen
- Economic Operation of Power SystemsDokument16 SeitenEconomic Operation of Power SystemsSai Charan Chowdary100% (2)
- LFC ThesisDokument40 SeitenLFC ThesisAshik AhmedNoch keine Bewertungen
- Automatic Generation ControlDokument19 SeitenAutomatic Generation ControlAjay Talajiya100% (1)
- IED Word PaperDokument14 SeitenIED Word PaperimranNoch keine Bewertungen
- Automatic Generation Control (AGC) or Automatic Load Frequency Control (ALFC)Dokument36 SeitenAutomatic Generation Control (AGC) or Automatic Load Frequency Control (ALFC)mohan krishna100% (1)
- Etap SimulationDokument40 SeitenEtap Simulation38650% (4)
- Energy Management System (EMS)Dokument20 SeitenEnergy Management System (EMS)HemaNoch keine Bewertungen
- Sargent, R. W. H. Bibcode Doi Bryson, A. E. DoiDokument8 SeitenSargent, R. W. H. Bibcode Doi Bryson, A. E. DoiKaleem Ullah Research AssociateNoch keine Bewertungen
- Power Operation and Control: Chapter-1Dokument32 SeitenPower Operation and Control: Chapter-1kplrpnNoch keine Bewertungen
- Power System Planning & OperationDokument31 SeitenPower System Planning & OperationBelayneh TadesseNoch keine Bewertungen
- Study On Automatic Generation Control of Two Area by Gain OptimizationDokument12 SeitenStudy On Automatic Generation Control of Two Area by Gain OptimizationSoumya paridaNoch keine Bewertungen
- Section 2 Scada-Ems 2-File 2Dokument240 SeitenSection 2 Scada-Ems 2-File 2Ali AlaamerNoch keine Bewertungen
- FFDokument22 SeitenFFDeepak DasNoch keine Bewertungen