Das könnte Ihnen auch gefallen
- Derrida, Declarations of Independence PDFDokument7 SeitenDerrida, Declarations of Independence PDFMichael Litwack100% (1)
- 3 D Vision Feedback For Nanohandling Monitoring in A Scanning Electron MicroscopeDokument24 Seiten3 D Vision Feedback For Nanohandling Monitoring in A Scanning Electron Microscopepurrab divakarNoch keine Bewertungen
- Manuscript v2 ShuaishuaiDokument9 SeitenManuscript v2 ShuaishuaiFarazNoch keine Bewertungen
- Experiments in 3D Measurements by Using Single Camera and Accurate MotionDokument6 SeitenExperiments in 3D Measurements by Using Single Camera and Accurate MotionĐường Khánh SơnNoch keine Bewertungen
- Object Tracking Based On Pattern MatchingDokument4 SeitenObject Tracking Based On Pattern Matchingeditor_ijarcsseNoch keine Bewertungen
- Moam - Info Object Distance Measurement by Stereo Vision World 59cdbe691723ddf765fc7471Dokument4 SeitenMoam - Info Object Distance Measurement by Stereo Vision World 59cdbe691723ddf765fc7471Trần NhậtNoch keine Bewertungen
- Object Distance Measurement by Stereo VisionDokument5 SeitenObject Distance Measurement by Stereo Visionvctorvargas9383Noch keine Bewertungen
- Distance Measurement System Using Binocular Stereo Vision Approach IJERTV2IS121134Dokument4 SeitenDistance Measurement System Using Binocular Stereo Vision Approach IJERTV2IS121134Michelle BrownNoch keine Bewertungen
- Build 3 DScanner Systembasedon Binocular Stereo VisionDokument7 SeitenBuild 3 DScanner Systembasedon Binocular Stereo Vision会爆炸的小米NoteNoch keine Bewertungen
- Automatic Segmentation Based On Statistical Parameters For Infrared ImagesDokument10 SeitenAutomatic Segmentation Based On Statistical Parameters For Infrared ImagesDr. Vishwanath ShervegarNoch keine Bewertungen
- Camera Object Tracking Fast AlgorithmDokument7 SeitenCamera Object Tracking Fast AlgorithmRadenkovicNoch keine Bewertungen
- Evaluation of The Kinect™ Sensor For 3-D Kinematic Measurement in The WorkplaceDokument5 SeitenEvaluation of The Kinect™ Sensor For 3-D Kinematic Measurement in The WorkplaceergoshaunNoch keine Bewertungen
- January 10, 2018Dokument22 SeitenJanuary 10, 2018Darshan ShahNoch keine Bewertungen
- Research Article: CLEAN Technique To Classify and Detect Objects in Subsurface ImagingDokument7 SeitenResearch Article: CLEAN Technique To Classify and Detect Objects in Subsurface ImagingBilge MiniskerNoch keine Bewertungen
- Report V1.1.4.finalDokument17 SeitenReport V1.1.4.finalDiego CorreaNoch keine Bewertungen
- Region Covariance Based Object Tracking Using Monte Carlo MethodDokument4 SeitenRegion Covariance Based Object Tracking Using Monte Carlo MethodVasuhi SamyduraiNoch keine Bewertungen
- Terrestrial Photogrammetry and Application To Modeling Architectural ObjectsDokument13 SeitenTerrestrial Photogrammetry and Application To Modeling Architectural ObjectsMuhriz MazaniNoch keine Bewertungen
- Close Range Digital Photogrammetry Applied To Topography and Landslide MeasurementsDokument6 SeitenClose Range Digital Photogrammetry Applied To Topography and Landslide Measurementsugo_rossiNoch keine Bewertungen
- ITS Master 15963 Paper PDFDokument6 SeitenITS Master 15963 Paper PDFAbdelrahim Hussam MoubayedNoch keine Bewertungen
- Autonomous Robot OperationDokument16 SeitenAutonomous Robot OperationDiego CorreaNoch keine Bewertungen
- Webcam Motion Detection 2007Dokument4 SeitenWebcam Motion Detection 2007anon-773497Noch keine Bewertungen
- Object TrackDokument5 SeitenObject TrackEngr EbiNoch keine Bewertungen
- Calculating Distance To Tomato Using Stereo Vision For Automatic HarvestingDokument9 SeitenCalculating Distance To Tomato Using Stereo Vision For Automatic HarvestingÁnh Phạm NgọcNoch keine Bewertungen
- Object Tracking Using High Resolution Satellite ImageryDokument15 SeitenObject Tracking Using High Resolution Satellite ImageryashalizajohnNoch keine Bewertungen
- Mikulski Stanislaw Laser 11Dokument7 SeitenMikulski Stanislaw Laser 11NuegatteNoch keine Bewertungen
- Finding 3 D Positions From 2 D ImagesDokument4 SeitenFinding 3 D Positions From 2 D ImagesaseNoch keine Bewertungen
- Edge Detection-Application of (First and Second) Order Derivative in Image ProcessingDokument11 SeitenEdge Detection-Application of (First and Second) Order Derivative in Image ProcessingBhuviNoch keine Bewertungen
- Analysis of Small Tumours in Ultrasound Breast Echography: AbstractDokument4 SeitenAnalysis of Small Tumours in Ultrasound Breast Echography: AbstractDimona MoldovanuNoch keine Bewertungen
- Research of Multi-Object Detection and Tracking Using Machine Learning Based On Knowledge For Video Surveillance SystemDokument10 SeitenResearch of Multi-Object Detection and Tracking Using Machine Learning Based On Knowledge For Video Surveillance SystemBredino LolerNoch keine Bewertungen
- Moving Body/object Detection and TrackingDokument4 SeitenMoving Body/object Detection and TrackingInternational Journal of Application or Innovation in Engineering & ManagementNoch keine Bewertungen
- Introduction To Image Processing: Dr. Shahrul Nizam YaakobDokument44 SeitenIntroduction To Image Processing: Dr. Shahrul Nizam YaakobNatasya AzmanNoch keine Bewertungen
- ImageDokument14 SeitenImageShanjuJossiahNoch keine Bewertungen
- Youn': Entrance Detection of A Moving Object Using Intensity Average Variation of Subtraction ImagesDokument6 SeitenYoun': Entrance Detection of A Moving Object Using Intensity Average Variation of Subtraction ImagesleninbNoch keine Bewertungen
- Tracking Human Motion Using SkelDokument5 SeitenTracking Human Motion Using SkelnavyataNoch keine Bewertungen
- Computer Vision Using Fuzzy Logic For ManipulatorDokument9 SeitenComputer Vision Using Fuzzy Logic For Manipulatortou kaiNoch keine Bewertungen
- Robot Vision: Y. ShiraiDokument28 SeitenRobot Vision: Y. ShiraiRogelio Portillo VelezNoch keine Bewertungen
- PP 34-40 Real Time Implementation ofDokument7 SeitenPP 34-40 Real Time Implementation ofEditorijset IjsetNoch keine Bewertungen
- Modelling Scattering Distortion in 3D Range CameraDokument6 SeitenModelling Scattering Distortion in 3D Range CameraMuhammad Ahmad MalikNoch keine Bewertungen
- Real-Time Image Processing Algorithms For Object and Distances Identification in Mobile Robot Trajectory PlanningDokument6 SeitenReal-Time Image Processing Algorithms For Object and Distances Identification in Mobile Robot Trajectory PlanningamitsbhatiNoch keine Bewertungen
- Human Motion Detection and Video Surveillance Using MATLAB: Sapana K. Mishra, Kanchan .S BhagatDokument4 SeitenHuman Motion Detection and Video Surveillance Using MATLAB: Sapana K. Mishra, Kanchan .S BhagatRazvanHaragNoch keine Bewertungen
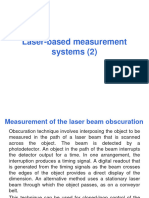
- 4 Laser Systems 2Dokument17 Seiten4 Laser Systems 2aelhosary770Noch keine Bewertungen
- (IJET-V1I6P15) Authors: Sadhana Raut, Poonam Rohani, Sumera Shaikh, Tehesin Shikilkar, Mrs. G. J. ChhajedDokument7 Seiten(IJET-V1I6P15) Authors: Sadhana Raut, Poonam Rohani, Sumera Shaikh, Tehesin Shikilkar, Mrs. G. J. ChhajedInternational Journal of Engineering and TechniquesNoch keine Bewertungen
- 3D Face Matching Using Passive Stereo VisionDokument13 Seiten3D Face Matching Using Passive Stereo VisionPaban SarmaNoch keine Bewertungen
- A Study of The Necessity For Cooling of Chargecoupled Devices in Xray Imaging SystemsDokument5 SeitenA Study of The Necessity For Cooling of Chargecoupled Devices in Xray Imaging SystemsulaganathanNoch keine Bewertungen
- Iran I 93 MotionDokument24 SeitenIran I 93 MotionAlejandro PerezNoch keine Bewertungen
- Robot-Sensor System Integration by Means Vision Ultrasonic Sensing For Localization and Recognition ObjectsDokument7 SeitenRobot-Sensor System Integration by Means Vision Ultrasonic Sensing For Localization and Recognition ObjectsRavi SharmaNoch keine Bewertungen
- Format Will Be Similar To That of Sample Quiz.: 4. What Is Resolution?Dokument6 SeitenFormat Will Be Similar To That of Sample Quiz.: 4. What Is Resolution?Santosh Reddy ChadaNoch keine Bewertungen
- Polarimetric Imaging System For Automatic Target Detection and RecognitionDokument20 SeitenPolarimetric Imaging System For Automatic Target Detection and RecognitionChetan MruthyunjayaNoch keine Bewertungen
- Swati's Paper On RobotrackerDokument19 SeitenSwati's Paper On RobotrackerpamswatiNoch keine Bewertungen
- Liu2017 PDFDokument13 SeitenLiu2017 PDFChaithra LakshmiNoch keine Bewertungen
- Synthetic Image Generation With and Aperture Camera ModelDokument24 SeitenSynthetic Image Generation With and Aperture Camera ModelAnis HadjariNoch keine Bewertungen
- Hierarchical Vertebral Body Segmentation Using Graph Cuts and Statistical Shape ModellingDokument5 SeitenHierarchical Vertebral Body Segmentation Using Graph Cuts and Statistical Shape ModellingijtetjournalNoch keine Bewertungen
- Robust Model-Based 3D Object Recognition by Combining Feature Matching With TrackingDokument6 SeitenRobust Model-Based 3D Object Recognition by Combining Feature Matching With TrackingVinoth GunaSekaranNoch keine Bewertungen
- Photogrammetry Mathematics 080116Dokument128 SeitenPhotogrammetry Mathematics 080116firosekhan100% (2)
- Determination The Resolving Power of A TelescopeDokument6 SeitenDetermination The Resolving Power of A TelescopeAsa mathewNoch keine Bewertungen
- Motion Estimation For Moving Target DetectionDokument9 SeitenMotion Estimation For Moving Target DetectionSatyam ShandilyaNoch keine Bewertungen
- Discrete FiltersDokument7 SeitenDiscrete FiltersFilip AndreiNoch keine Bewertungen
- "Hands-Free PC Control" Controlling of Mouse Cursor Using Eye MovementDokument5 Seiten"Hands-Free PC Control" Controlling of Mouse Cursor Using Eye MovementTg WallasNoch keine Bewertungen
- Digital Image Processing IntroductionDokument33 SeitenDigital Image Processing IntroductionAshish KumarNoch keine Bewertungen
- Industrial X-Ray Computed TomographyVon EverandIndustrial X-Ray Computed TomographySimone CarmignatoNoch keine Bewertungen
- Standard and Super-Resolution Bioimaging Data Analysis: A PrimerVon EverandStandard and Super-Resolution Bioimaging Data Analysis: A PrimerNoch keine Bewertungen
- Programming of HC900 Controller Based Speed Control System For D.C. MotorDokument8 SeitenProgramming of HC900 Controller Based Speed Control System For D.C. MotorBrijesh SrivastavNoch keine Bewertungen
- Asco Temperature SeriesDokument4 SeitenAsco Temperature SeriesJhon PaulNoch keine Bewertungen
- Merlin Gerin SF1Dokument30 SeitenMerlin Gerin SF1BARAJASMEDINA100% (1)
- 150 C85NBD 1294071956Dokument24 Seiten150 C85NBD 1294071956Jhon PaulNoch keine Bewertungen
- Message Staging and Logging Options in Advanced Adapter Engine of PI - PO 7.3x - 7.4 - SAP Blogs PDFDokument26 SeitenMessage Staging and Logging Options in Advanced Adapter Engine of PI - PO 7.3x - 7.4 - SAP Blogs PDFSujith KumarNoch keine Bewertungen
- 17. ĐỀ SỐ 17 HSG ANH 9 HUYỆNDokument9 Seiten17. ĐỀ SỐ 17 HSG ANH 9 HUYỆNHồng Hoàn NguyễnNoch keine Bewertungen
- Carl Jung - CW 18 Symbolic Life AbstractsDokument50 SeitenCarl Jung - CW 18 Symbolic Life AbstractsReni DimitrovaNoch keine Bewertungen
- Labour WelfareDokument250 SeitenLabour WelfareArundhathi AdarshNoch keine Bewertungen
- Master SC 2015 enDokument72 SeitenMaster SC 2015 enNivas Kumar SureshNoch keine Bewertungen
- Ubd Food ChainDokument5 SeitenUbd Food Chainapi-313687749Noch keine Bewertungen
- Cleanliness LevelDokument4 SeitenCleanliness LevelArunkumar ChandaranNoch keine Bewertungen
- Flow Diagram: Equipment Identification Numbering SystemDokument24 SeitenFlow Diagram: Equipment Identification Numbering Systemmkpq100% (1)
- Exercise of English LanguageDokument2 SeitenExercise of English LanguageErspnNoch keine Bewertungen
- Storage Center: Command Set 4.1Dokument174 SeitenStorage Center: Command Set 4.1luke.lecheler5443Noch keine Bewertungen
- TGC 121 505558shubham AggarwalDokument4 SeitenTGC 121 505558shubham Aggarwalshubham.aggarwalNoch keine Bewertungen
- Skripsi Tanpa Bab Pembahasan PDFDokument67 SeitenSkripsi Tanpa Bab Pembahasan PDFaaaaNoch keine Bewertungen
- Transportation Hub - Sample WorkDokument17 SeitenTransportation Hub - Sample WorkMohamed LabibNoch keine Bewertungen
- Physics - DDPS1713 - Chapter 4-Work, Energy, Momentum and PowerDokument26 SeitenPhysics - DDPS1713 - Chapter 4-Work, Energy, Momentum and Powerjimmi_ramliNoch keine Bewertungen
- Absolute Duo 1 PDFDokument219 SeitenAbsolute Duo 1 PDFAgnieškaRužičkaNoch keine Bewertungen
- O.E.Lab - Docx For Direct Shear TestDokument14 SeitenO.E.Lab - Docx For Direct Shear TestAmirah SyakiraNoch keine Bewertungen
- Fruits Basket - MemoryDokument1 SeiteFruits Basket - Memorywane10132100% (1)
- Program - PPEPPD 2019 ConferenceDokument3 SeitenProgram - PPEPPD 2019 ConferenceLuis FollegattiNoch keine Bewertungen
- PhantasmagoriaDokument161 SeitenPhantasmagoriamontgomeryhughes100% (1)
- Innoventure List of Short Listed CandidatesDokument69 SeitenInnoventure List of Short Listed CandidatesgovindmalhotraNoch keine Bewertungen
- Technical Report No. 1/12, February 2012 Jackknifing The Ridge Regression Estimator: A Revisit Mansi Khurana, Yogendra P. Chaubey and Shalini ChandraDokument22 SeitenTechnical Report No. 1/12, February 2012 Jackknifing The Ridge Regression Estimator: A Revisit Mansi Khurana, Yogendra P. Chaubey and Shalini ChandraRatna YuniartiNoch keine Bewertungen
- Dürer's Rhinoceros Springer Esteban JMDokument29 SeitenDürer's Rhinoceros Springer Esteban JMmiguelestebanNoch keine Bewertungen
- English II Homework Module 6Dokument5 SeitenEnglish II Homework Module 6Yojana DubonNoch keine Bewertungen
- HT 02 Intro Tut 07 Radiation and ConvectionDokument46 SeitenHT 02 Intro Tut 07 Radiation and ConvectionrbeckkNoch keine Bewertungen
- Part 1 - Install PfSense On ESXi - Calvin BuiDokument8 SeitenPart 1 - Install PfSense On ESXi - Calvin Buiandrei2andrei_3Noch keine Bewertungen
- Practice Revision Questions Number SystemsDokument1 SeitePractice Revision Questions Number SystemsRavi Prasaath IXNoch keine Bewertungen
- IMS - General MBA - Interview QuestionsDokument2 SeitenIMS - General MBA - Interview QuestionsRahulSatputeNoch keine Bewertungen
- Waqas Ahmed C.VDokument2 SeitenWaqas Ahmed C.VWAQAS AHMEDNoch keine Bewertungen