Das könnte Ihnen auch gefallen
- Mechanical Vibration Solved ExamplesDokument92 SeitenMechanical Vibration Solved ExamplesZain Ahmed85% (13)
- Rayleigh Ritz MethodDokument7 SeitenRayleigh Ritz Methodrameshbabu_197963% (8)
- Long-Wavelength Infrared Semiconductor Lasers PDFDokument406 SeitenLong-Wavelength Infrared Semiconductor Lasers PDFKunchur Narayan100% (1)
- May2018 Physics Paper 2 TZ2 HL MarkschemeDokument18 SeitenMay2018 Physics Paper 2 TZ2 HL MarkschemeAnanya Aggarwal100% (1)
- Alastair I. M. Rae - Quantum Mechanics, Sixth Edition (6th Ed) (Instructor's Solution Manual) (Solutions) - Routledge (2015)Dokument158 SeitenAlastair I. M. Rae - Quantum Mechanics, Sixth Edition (6th Ed) (Instructor's Solution Manual) (Solutions) - Routledge (2015)Manuel SalazarNoch keine Bewertungen
- Physics Principles: Labster SimulationsDokument4 SeitenPhysics Principles: Labster SimulationsJhun Lerry TayanNoch keine Bewertungen
- Kent Hovind Seminar Slides - Part 7 Q&a - Frequently Asked Questions About Creationism PDFDokument1.278 SeitenKent Hovind Seminar Slides - Part 7 Q&a - Frequently Asked Questions About Creationism PDFMagnentius100% (2)
- Harmonic Oscillation, Komang SuardikaDokument125 SeitenHarmonic Oscillation, Komang SuardikaKomang SuardikaNoch keine Bewertungen
- Vibrations in Engineering: Faculty of Civil Engineering and Applied MechanicsDokument133 SeitenVibrations in Engineering: Faculty of Civil Engineering and Applied Mechanicsvuhoangdai90Noch keine Bewertungen
- Given A Potential Energy Graph, Oscillations Will Occur Between Turning Points Determined byDokument9 SeitenGiven A Potential Energy Graph, Oscillations Will Occur Between Turning Points Determined byjdlawlisNoch keine Bewertungen
- Homework 7Dokument7 SeitenHomework 7Ale Gomez100% (5)
- DRM SolutionsDokument116 SeitenDRM SolutionsCésar TapiaNoch keine Bewertungen
- II IIT IRP Physics Worksheet - 14 Q + Soln - SHMDokument17 SeitenII IIT IRP Physics Worksheet - 14 Q + Soln - SHMAshwin KumarNoch keine Bewertungen
- Elementary Tutorial: Fundamentals of Linear VibrationsDokument51 SeitenElementary Tutorial: Fundamentals of Linear VibrationsfujinyuanNoch keine Bewertungen
- The Non Linear Advection Equation (Inviscid Burgers Equation)Dokument6 SeitenThe Non Linear Advection Equation (Inviscid Burgers Equation)linoNoch keine Bewertungen
- Vibration LectureDokument49 SeitenVibration LectureMark Oliver BernardoNoch keine Bewertungen
- Review of Dynamics and Mechanisms of Machinery: MECH 103Dokument92 SeitenReview of Dynamics and Mechanisms of Machinery: MECH 103Sunilkumar ReddyNoch keine Bewertungen
- The Harmonic Oscillator: B (MagneticDokument19 SeitenThe Harmonic Oscillator: B (MagneticsamuelifamilyNoch keine Bewertungen
- Note 5Dokument14 SeitenNote 5MohamedNoch keine Bewertungen
- Unit I Mathematical Tools 1.1 Basic Mathematics For Physics: I. Quadratic Equation and Its SolutionDokument16 SeitenUnit I Mathematical Tools 1.1 Basic Mathematics For Physics: I. Quadratic Equation and Its SolutionJit AggNoch keine Bewertungen
- ChewMA1506-14 Ch8 PDFDokument69 SeitenChewMA1506-14 Ch8 PDFalibabawalaoaNoch keine Bewertungen
- 10 Harmonic OscillatorDokument133 Seiten10 Harmonic OscillatorrohitNoch keine Bewertungen
- Formula Sheet VWDokument1 SeiteFormula Sheet VWReddyvari VenugopalNoch keine Bewertungen
- MCG 4308 Lec 4Dokument25 SeitenMCG 4308 Lec 4Nadjet AkloucheNoch keine Bewertungen
- MCG 4308 Lec 4Dokument25 SeitenMCG 4308 Lec 4Nadjet AkloucheNoch keine Bewertungen
- Ch40 Young Freedman1Dokument72 SeitenCh40 Young Freedman1Andrew MerrillNoch keine Bewertungen
- Simple Harmonic Motion, SuperpositionDokument9 SeitenSimple Harmonic Motion, SuperpositionSaurav KumarNoch keine Bewertungen
- Mathematical Modeling of Mechanical Systems and Electrical SystemsDokument49 SeitenMathematical Modeling of Mechanical Systems and Electrical SystemsMary DunhamNoch keine Bewertungen
- Formula SheetDokument5 SeitenFormula SheetKevin YeNoch keine Bewertungen
- Quantum Mechanics NET-JRF June 2011 - June 2014Dokument32 SeitenQuantum Mechanics NET-JRF June 2011 - June 2014Abhishek UpadhyayNoch keine Bewertungen
- Files-3-Handouts Solved Problems Chapter 3 Mechanical Systems PDFDokument7 SeitenFiles-3-Handouts Solved Problems Chapter 3 Mechanical Systems PDFHemanta DikshitNoch keine Bewertungen
- Two Lecture VibrationDokument12 SeitenTwo Lecture VibrationUjjawal GuptaNoch keine Bewertungen
- 1-D Heat EquationDokument8 Seiten1-D Heat EquationSiddharth KalraNoch keine Bewertungen
- Structural DynamicsDokument99 SeitenStructural DynamicsUtb Bjp100% (10)
- Damped Vibration: Viscous and Coulomb DampingDokument14 SeitenDamped Vibration: Viscous and Coulomb DampingEmmanuel KutaniNoch keine Bewertungen
- Lecture 42: Simple Harmonic Motion QuizDokument5 SeitenLecture 42: Simple Harmonic Motion QuizAyam MasNoch keine Bewertungen
- Differential EquationsOverview of Differential EquationsDokument14 SeitenDifferential EquationsOverview of Differential EquationsrtalexanderNoch keine Bewertungen
- Quantum Mechanics - Homework Assignment 3: Alejandro G Omez Espinosa October 8, 2012Dokument7 SeitenQuantum Mechanics - Homework Assignment 3: Alejandro G Omez Espinosa October 8, 2012Ale GomezNoch keine Bewertungen
- Assignment CoverpageDokument12 SeitenAssignment Coverpageajay shresthaNoch keine Bewertungen
- Mit Double PedulumDokument13 SeitenMit Double PedulumAntoineNoch keine Bewertungen
- Kittel Kroemer Thermal PhysicsDokument40 SeitenKittel Kroemer Thermal PhysicscarlnigNoch keine Bewertungen
- Math Stats Booklet 1Dokument20 SeitenMath Stats Booklet 1Koh Boon HaoNoch keine Bewertungen
- Wave Optics DSSSBDokument30 SeitenWave Optics DSSSBShubhamNoch keine Bewertungen
- Strovink) : Solution To Final Examination Problem 1. A. Problem 2Dokument3 SeitenStrovink) : Solution To Final Examination Problem 1. A. Problem 2Debiprasad PattnaikNoch keine Bewertungen
- MCG4308 Lec4Dokument25 SeitenMCG4308 Lec4Christian PaultreNoch keine Bewertungen
- Harmonic Oscillator Up To Forced UndampedDokument86 SeitenHarmonic Oscillator Up To Forced UndampedasdasdNoch keine Bewertungen
- Classnotes For Classical Control Theory: I. E. K Ose Dept. of Mechanical Engineering Bo Gazici UniversityDokument51 SeitenClassnotes For Classical Control Theory: I. E. K Ose Dept. of Mechanical Engineering Bo Gazici UniversityGürkan YamanNoch keine Bewertungen
- Chapter 1 & 2 - Introduction To Vibrations and Single DOF SystemsDokument86 SeitenChapter 1 & 2 - Introduction To Vibrations and Single DOF SystemsMohamad Faiz TonyNoch keine Bewertungen
- 2 4 PDFDokument8 Seiten2 4 PDFshian ervin lopezNoch keine Bewertungen
- 2 - 4 Spring MassDokument8 Seiten2 - 4 Spring Masshemal4379Noch keine Bewertungen
- 125Dokument19 Seiten125Shailendra AgarwalNoch keine Bewertungen
- SHM Review - SHM Using Differential Equations - Critical DampingDokument18 SeitenSHM Review - SHM Using Differential Equations - Critical Dampingaaljuhani123Noch keine Bewertungen
- Final Formula SheetDokument3 SeitenFinal Formula SheetwhatnononoNoch keine Bewertungen
- Diff EQ Chapter-4Dokument156 SeitenDiff EQ Chapter-4mcloughtNoch keine Bewertungen
- Spring / Mass Systems: KX DT X D MDokument5 SeitenSpring / Mass Systems: KX DT X D Mmira0604Noch keine Bewertungen
- Preguntas Resueltas PDFDokument46 SeitenPreguntas Resueltas PDFJustin BullockNoch keine Bewertungen
- Ten-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesVon EverandTen-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesNoch keine Bewertungen
- Trigonometric Ratios to Transformations (Trigonometry) Mathematics E-Book For Public ExamsVon EverandTrigonometric Ratios to Transformations (Trigonometry) Mathematics E-Book For Public ExamsBewertung: 5 von 5 Sternen5/5 (1)
- Mathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsVon EverandMathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsNoch keine Bewertungen
- Logical progression of twelve double binary tables of physical-mathematical elements correlated with scientific-philosophical as well as metaphysical key concepts evidencing the dually four-dimensional basic structure of the universeVon EverandLogical progression of twelve double binary tables of physical-mathematical elements correlated with scientific-philosophical as well as metaphysical key concepts evidencing the dually four-dimensional basic structure of the universeNoch keine Bewertungen
- De Moiver's Theorem (Trigonometry) Mathematics Question BankVon EverandDe Moiver's Theorem (Trigonometry) Mathematics Question BankNoch keine Bewertungen
- Advanced Structural Analysis Quiz 2: EA EA EADokument1 SeiteAdvanced Structural Analysis Quiz 2: EA EA EARK MEHTANoch keine Bewertungen
- Legrand 2010 Protection Switching PDFDokument76 SeitenLegrand 2010 Protection Switching PDFpopescudanmihaelNoch keine Bewertungen
- Sinyal Dan Sistem Latihan Soal Dan SolusiDokument12 SeitenSinyal Dan Sistem Latihan Soal Dan SolusiMuh Indjra DijeNoch keine Bewertungen
- CH5100 Peristaltic FlowDokument21 SeitenCH5100 Peristaltic FlowashuiskeshavNoch keine Bewertungen
- Assignment IVDokument2 SeitenAssignment IVDechenPemaNoch keine Bewertungen
- All 1B CSM PDFDokument486 SeitenAll 1B CSM PDFConstanza Cáceres Vidal67% (3)
- Coupling 17.7Dokument101 SeitenCoupling 17.7Volodymyr Skalozub100% (2)
- Measuring and Testing EquipmentsDokument3 SeitenMeasuring and Testing EquipmentsJolly Rose GonzalesNoch keine Bewertungen
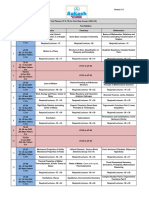
- Aakash Test ScheduleDokument4 SeitenAakash Test ScheduleKirtan KumarNoch keine Bewertungen
- Continuity Equation DerivationDokument3 SeitenContinuity Equation Derivationvijay kumar honnaliNoch keine Bewertungen
- PV Grid Integration: Backgrounds, Requirements, and SMA SolutionsDokument36 SeitenPV Grid Integration: Backgrounds, Requirements, and SMA SolutionsParthibanPerumalNoch keine Bewertungen
- Protection PresentationDokument15 SeitenProtection PresentationAlmiqdad AldeekNoch keine Bewertungen
- The Mole and StoichiometryDokument14 SeitenThe Mole and StoichiometryJulie Amor ZantuaNoch keine Bewertungen
- Oscillations: By-Tasneem Xi - A Roll-11138Dokument51 SeitenOscillations: By-Tasneem Xi - A Roll-11138Dilshad HussainNoch keine Bewertungen
- Ball MillDokument7 SeitenBall MillAshish VermaNoch keine Bewertungen
- An Investigation Into The Causes of Poor Academic Performannce in Mathematics Among University Students in NigeriaDokument10 SeitenAn Investigation Into The Causes of Poor Academic Performannce in Mathematics Among University Students in Nigeriaisaac e ochigboNoch keine Bewertungen
- f5 c1 Force and Motion 2Dokument35 Seitenf5 c1 Force and Motion 2ZULAIKHA BINTI YA'COB MoeNoch keine Bewertungen
- Copenhagen Interpretation - WikipediaDokument12 SeitenCopenhagen Interpretation - WikipediaYn Foan100% (1)
- 1.0 Objective: 2.0 IntoductionDokument1 Seite1.0 Objective: 2.0 IntoductionabdirahmanNoch keine Bewertungen
- Lab Conservation of Mechanical EnergyDokument10 SeitenLab Conservation of Mechanical EnergyNNoch keine Bewertungen
- Rms Polytechnic: Prepared By: Priyanka PatelDokument35 SeitenRms Polytechnic: Prepared By: Priyanka PatelBhaumik ParmarNoch keine Bewertungen
- 4 Material Properties That Affect Distortion - WELDING ANSWERSDokument2 Seiten4 Material Properties That Affect Distortion - WELDING ANSWERSChabdi EssenzNoch keine Bewertungen
- HT Chapter 03Dokument13 SeitenHT Chapter 03shamoonjamshedNoch keine Bewertungen
- Babita Kumari: Education SkillsDokument2 SeitenBabita Kumari: Education SkillsN NandiniNoch keine Bewertungen
- Ex 7Dokument5 SeitenEx 7Jean AraúzNoch keine Bewertungen
- AcousticsDokument8 SeitenAcousticsDenaiya Watton Leeh100% (2)