Das könnte Ihnen auch gefallen
- 2 - Lecture II - Law and EthicsDokument43 Seiten2 - Lecture II - Law and EthicsMahmoud El-MahdyNoch keine Bewertungen
- 1 - Legislation, Contracts & Engineering Ethics - Lecture 1 - October 17-2013 PDFDokument18 Seiten1 - Legislation, Contracts & Engineering Ethics - Lecture 1 - October 17-2013 PDFMahmoud El-MahdyNoch keine Bewertungen
- Final Revision Part1Dokument12 SeitenFinal Revision Part1Mahmoud El-MahdyNoch keine Bewertungen
- Control Lect1Dokument12 SeitenControl Lect1Mahmoud El-MahdyNoch keine Bewertungen
- Final Revision Part2Dokument8 SeitenFinal Revision Part2Mahmoud El-MahdyNoch keine Bewertungen
- 4 - Lecture IV (Tort Law) PDFDokument18 Seiten4 - Lecture IV (Tort Law) PDFMahmoud El-MahdyNoch keine Bewertungen
- Numerical Analysis MATH-602 Quiz 001 Time 20 Minutes: Mathematics Department Prof. Dr. Gerd BaumannDokument2 SeitenNumerical Analysis MATH-602 Quiz 001 Time 20 Minutes: Mathematics Department Prof. Dr. Gerd BaumannMahmoud El-MahdyNoch keine Bewertungen
- Orthogonal Polynomials Extra ProblemsDokument6 SeitenOrthogonal Polynomials Extra ProblemsMahmoud El-MahdyNoch keine Bewertungen
- Lecture 008Dokument15 SeitenLecture 008Mahmoud El-MahdyNoch keine Bewertungen
- Lecture 011Dokument58 SeitenLecture 011Mahmoud El-MahdyNoch keine Bewertungen
- Roots of Equations: K K K + K K K + K KDokument17 SeitenRoots of Equations: K K K + K K K + K KMahmoud El-MahdyNoch keine Bewertungen
- 1.1 Gaussian Numerical Integration ContinuedDokument33 Seiten1.1 Gaussian Numerical Integration ContinuedMahmoud El-MahdyNoch keine Bewertungen
- Roots of Equations: 1.0.1 Newton's MethodDokument20 SeitenRoots of Equations: 1.0.1 Newton's MethodMahmoud El-MahdyNoch keine Bewertungen
- IM Part-1Dokument14 SeitenIM Part-1Mahmoud El-MahdyNoch keine Bewertungen
- Lecture 009Dokument23 SeitenLecture 009Mahmoud El-MahdyNoch keine Bewertungen
- Lect 2Dokument25 SeitenLect 2Mahmoud El-MahdyNoch keine Bewertungen
- DC Part 1-1Dokument19 SeitenDC Part 1-1Mahmoud El-Mahdy100% (1)
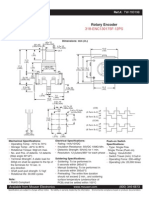
- Rotary EncoderDokument1 SeiteRotary EncoderMahmoud El-MahdyNoch keine Bewertungen
- Lecture 005Dokument17 SeitenLecture 005Mahmoud El-MahdyNoch keine Bewertungen
- DC Part 2Dokument29 SeitenDC Part 2Mahmoud El-Mahdy100% (1)
- Tcs 230Dokument10 SeitenTcs 230MuseByKeaneNoch keine Bewertungen
- Polynomial Approximation by Least Squares: Distance in A Vector SpaceDokument6 SeitenPolynomial Approximation by Least Squares: Distance in A Vector SpaceMahmoud El-MahdyNoch keine Bewertungen
- HMC5843Dokument19 SeitenHMC5843Cihat Sami GüngörNoch keine Bewertungen
- Roots of Equations: K K K + K K K + K KDokument17 SeitenRoots of Equations: K K K + K K K + K KMahmoud El-MahdyNoch keine Bewertungen
- Paper70 ICARA2004 401 407Dokument7 SeitenPaper70 ICARA2004 401 407Mahmoud El-MahdyNoch keine Bewertungen
- Technical Report - Circuits (Fall 2007)Dokument5 SeitenTechnical Report - Circuits (Fall 2007)Mahmoud El-MahdyNoch keine Bewertungen
- Metal Detector-Project ReportDokument26 SeitenMetal Detector-Project ReportTimK77% (52)
- Paper70 ICARA2004 401 407Dokument7 SeitenPaper70 ICARA2004 401 407Mahmoud El-MahdyNoch keine Bewertungen
- 10 1 1 116 1392Dokument142 Seiten10 1 1 116 1392Mahmoud El-MahdyNoch keine Bewertungen
- May 7, 2009 18:13 WSPC - Proceedings Trim Size: 9in X 6in Autonomous ClimbingDokument8 SeitenMay 7, 2009 18:13 WSPC - Proceedings Trim Size: 9in X 6in Autonomous ClimbingMahmoud El-MahdyNoch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Lecture 06Dokument40 SeitenLecture 06Reddyvari VenugopalNoch keine Bewertungen
- Tabulation of Data and Parts of A Table - Presentation of Data - Everonn - Class-11th CommerceDokument2 SeitenTabulation of Data and Parts of A Table - Presentation of Data - Everonn - Class-11th CommerceMd Shawfiqul IslamNoch keine Bewertungen
- Glickman (1) - Ethical and Scientific Implications of The Globalization of Clinical Research NEJMDokument8 SeitenGlickman (1) - Ethical and Scientific Implications of The Globalization of Clinical Research NEJMMaria BernalNoch keine Bewertungen
- General Biology 2 Midterms GRASPSDokument2 SeitenGeneral Biology 2 Midterms GRASPSAlbert RoseteNoch keine Bewertungen
- Tle 6 Mam Melba (Victoria)Dokument2 SeitenTle 6 Mam Melba (Victoria)Precious IdiosoloNoch keine Bewertungen
- Kurt LewinDokument8 SeitenKurt Lewinmaria_bianco679079Noch keine Bewertungen
- (1997) Process Capability Analysis For Non-Normal Relay Test DataDokument8 Seiten(1997) Process Capability Analysis For Non-Normal Relay Test DataNELSONHUGONoch keine Bewertungen
- MOUNTAINDokument8 SeitenMOUNTAINlara_sin_crof6873Noch keine Bewertungen
- Posture of EcstasyDokument1 SeitePosture of EcstasyJonathanNoch keine Bewertungen
- AI Learning ResourcesDokument6 SeitenAI Learning Resourcesrip asawNoch keine Bewertungen
- PSD - Trilok - Kalyan Medicals - June 29, 17 - Business Proposal Ver 1Dokument7 SeitenPSD - Trilok - Kalyan Medicals - June 29, 17 - Business Proposal Ver 1papuNoch keine Bewertungen
- International Baccalaureate ProgrammeDokument5 SeitenInternational Baccalaureate Programmeapi-280508830Noch keine Bewertungen
- SQL NotesDokument42 SeitenSQL NoteskumarNoch keine Bewertungen
- Chapter Test A: Teacher Notes and Answers Vibrations and WavesDokument5 SeitenChapter Test A: Teacher Notes and Answers Vibrations and WavesMuhammadNoch keine Bewertungen
- Ward Wise Officers ListDokument8 SeitenWard Wise Officers ListprabsssNoch keine Bewertungen
- SRS APO Panel ReadmeDokument25 SeitenSRS APO Panel ReadmeLiz Minmey Flores FloresNoch keine Bewertungen
- Netapp Powershell CommandsDokument74 SeitenNetapp Powershell CommandsravishankarNoch keine Bewertungen
- Analog Layout EngineerDokument4 SeitenAnalog Layout EngineerAjay Kumar MattupalliNoch keine Bewertungen
- Lich Bao Ve LVTN - Sem 2 - 2018-2019 - Thong Bao Sinh VienDokument16 SeitenLich Bao Ve LVTN - Sem 2 - 2018-2019 - Thong Bao Sinh VienKha NguyễnNoch keine Bewertungen
- The Isolation Approach To Elliott Wave Analysis: by Steve GriffithsDokument6 SeitenThe Isolation Approach To Elliott Wave Analysis: by Steve Griffithssam2976Noch keine Bewertungen
- Test Strategy TemplateDokument26 SeitenTest Strategy TemplateCola RichmondNoch keine Bewertungen
- Free W3 Blog TemplateDokument4 SeitenFree W3 Blog TemplateMaseko CharuzuNoch keine Bewertungen
- Dan Mateiesc-English Phonetics and Phonological TheotyDokument104 SeitenDan Mateiesc-English Phonetics and Phonological TheotyMikymiky91100% (9)
- IBPS IT Officer Model Questions Computer MIcroprocessor and Assembly Language MCQ Question BankDokument146 SeitenIBPS IT Officer Model Questions Computer MIcroprocessor and Assembly Language MCQ Question BankNaveen KrishnanNoch keine Bewertungen
- Application Letter.Dokument2 SeitenApplication Letter.RinzuNoch keine Bewertungen
- Quarter 1 Science 4 Activity Sheet No. 6Dokument2 SeitenQuarter 1 Science 4 Activity Sheet No. 6karol melendezNoch keine Bewertungen
- Program Package For First Arrival Seismic TomographyDokument17 SeitenProgram Package For First Arrival Seismic TomographypraveenNoch keine Bewertungen
- Adu-Yeboah Emmanuel. Mphil in Leadership, UpsaDokument146 SeitenAdu-Yeboah Emmanuel. Mphil in Leadership, UpsaEmmanuel Adu-YeboahNoch keine Bewertungen
- Yameena Rashid: ObjectivesDokument2 SeitenYameena Rashid: ObjectivesMisbhasaeedaNoch keine Bewertungen
- PT326-Round2 Expt3 Batch19Dokument6 SeitenPT326-Round2 Expt3 Batch19Radhey MeenaNoch keine Bewertungen