Das könnte Ihnen auch gefallen
- SOLUCIÓN Práctica 3 - F2 - 2014-I - EjerciciosDokument3 SeitenSOLUCIÓN Práctica 3 - F2 - 2014-I - EjerciciosDeyver Morales Yarleque100% (1)
- Bass GuraDokument4 SeitenBass GuraPablo ObesoNoch keine Bewertungen
- Campos Electrostáticos en Medios MaterialesDokument26 SeitenCampos Electrostáticos en Medios MaterialesAmIn20122Noch keine Bewertungen
- Une en - 13001 2 2022Dokument4 SeitenUne en - 13001 2 2022Cabello GrisNoch keine Bewertungen
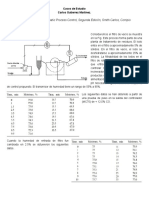
- Casos de EstudioDokument3 SeitenCasos de EstudioENRIQUE ROBLESNoch keine Bewertungen
- Descomposicion QRDokument4 SeitenDescomposicion QRzarceloNoch keine Bewertungen
- Diagonalizaciòn OrtogonalDokument15 SeitenDiagonalizaciòn OrtogonalFernando NoriegaNoch keine Bewertungen
- Solución Parcial Geometría DiferencialDokument9 SeitenSolución Parcial Geometría DiferencialLuis OcañaNoch keine Bewertungen
- Libro de Análisis Vectorial de Evaristo 2Dokument28 SeitenLibro de Análisis Vectorial de Evaristo 2Indira Ocampo JustinianoNoch keine Bewertungen
- Ajustes Minimos CuadraticosDokument9 SeitenAjustes Minimos Cuadraticosjuncar25Noch keine Bewertungen
- Método de Mínimos Cuadrados.Dokument11 SeitenMétodo de Mínimos Cuadrados.José Eduardo Cruz SánchezNoch keine Bewertungen
- Movimiento GiroscópicoDokument9 SeitenMovimiento GiroscópicoDonaldo Alvarado CorcueraNoch keine Bewertungen
- Aproximacion Funciones Con MatlabDokument49 SeitenAproximacion Funciones Con MatlabMichael GastelluNoch keine Bewertungen
- Ejercicios Cálculo Diferencial Vectorial #3Dokument8 SeitenEjercicios Cálculo Diferencial Vectorial #3solucionario7Noch keine Bewertungen
- Repaso de Series de PotenciaDokument45 SeitenRepaso de Series de PotenciaAngel Sandonas RomeroNoch keine Bewertungen
- Unidad 4 - Función Lineal PDFDokument23 SeitenUnidad 4 - Función Lineal PDFAlejandra ValenciaNoch keine Bewertungen
- Problemas Mecanica 2Dokument290 SeitenProblemas Mecanica 2Diego CarvajalNoch keine Bewertungen
- Actividades Previas Al LaboratorioDokument8 SeitenActividades Previas Al LaboratorioOperaciones Carga Líquida ALITRANSCOL S.A.S.Noch keine Bewertungen
- Metodo de Marcus (Losa Con Volados)Dokument9 SeitenMetodo de Marcus (Losa Con Volados)777ecorNoch keine Bewertungen
- Lab Fisica 02Dokument12 SeitenLab Fisica 02Samir Chayanne Contreras VenturaNoch keine Bewertungen
- Apuntes CM Tema5 Completo v2Dokument80 SeitenApuntes CM Tema5 Completo v2borjanunezasensioNoch keine Bewertungen
- Sistema BidimensionalDokument29 SeitenSistema BidimensionalAmIn20122100% (1)
- Unidad 7 - 3º EsoDokument7 SeitenUnidad 7 - 3º EsofrajavierpmNoch keine Bewertungen
- Gradiente ConjugadoDokument24 SeitenGradiente ConjugadoLuis Miguel RVNoch keine Bewertungen
- Practica 3 - Minimos Cuadrados - 2IM48 - Seccion ADokument12 SeitenPractica 3 - Minimos Cuadrados - 2IM48 - Seccion ARicardo Ibarra100% (1)
- Trabajos Elementos FinitosDokument8 SeitenTrabajos Elementos FinitosCarlos Luna HuayaneyNoch keine Bewertungen
- Algoritmo QR y El ProblemaDokument26 SeitenAlgoritmo QR y El ProblemaAmIn20122Noch keine Bewertungen
- 1 - Fuerza Eléctrica y Campo Electrico - PREG 2022 - 0Dokument3 Seiten1 - Fuerza Eléctrica y Campo Electrico - PREG 2022 - 0Luis TelloNoch keine Bewertungen
- 03 - Ejercicios de Campo EléctricoDokument2 Seiten03 - Ejercicios de Campo EléctricoA2M INGENIERIA Y CONSTRUCCIONNoch keine Bewertungen
- Ejercicios Intervalo de ConfianzaDokument5 SeitenEjercicios Intervalo de ConfianzaFred Quimico Salguero100% (1)
- Matematica ChatgptDokument4 SeitenMatematica ChatgptJavier Alejandro Madero TorresNoch keine Bewertungen
- Introduccion A La Estabilidad Dinamica de Aviones PDFDokument13 SeitenIntroduccion A La Estabilidad Dinamica de Aviones PDFErnesto D. AguirreNoch keine Bewertungen
- KarmarkarDokument12 SeitenKarmarkarAlex Rengifo-RojasNoch keine Bewertungen
- Ejercicio de Física T1Dokument2 SeitenEjercicio de Física T1Bako Ondo Dako AbuyNoch keine Bewertungen
- CN Cuadrados MinimosDokument22 SeitenCN Cuadrados MinimosNicolás Pino TorresNoch keine Bewertungen
- Geometr IaDokument52 SeitenGeometr IaAmIn20122Noch keine Bewertungen
- Práctica Tensorial 1P Ii-2019Dokument4 SeitenPráctica Tensorial 1P Ii-2019Vladwing LCNoch keine Bewertungen
- Clase No. 5 Introduccion A Ecuacion de La RectaDokument24 SeitenClase No. 5 Introduccion A Ecuacion de La RectaLuis ReynosoNoch keine Bewertungen
- Clase13 PDFDokument18 SeitenClase13 PDFNéstor Dávila FloresNoch keine Bewertungen
- Como Hallar La Pendiente de Una RectaDokument13 SeitenComo Hallar La Pendiente de Una RectaMayen Hernandez RamirezNoch keine Bewertungen
- Ecuacion de La RectaDokument20 SeitenEcuacion de La Rectapesito_100Noch keine Bewertungen
- Examenes ResueltosDokument82 SeitenExamenes ResueltosEsaias Huamani Jorge100% (2)
- 90 Vectores Ejercicios ResueltosDokument19 Seiten90 Vectores Ejercicios Resueltosartur1930Noch keine Bewertungen
- La RectaDokument17 SeitenLa RectaAMYNNXXXXNoch keine Bewertungen
- PresentaciónDokument22 SeitenPresentaciónAndres MarinNoch keine Bewertungen
- Curvas de PersecuciónDokument8 SeitenCurvas de PersecuciónMilton NicolayNoch keine Bewertungen
- Sols 2Dokument23 SeitenSols 2Jensen Angulo ChavezNoch keine Bewertungen
- Fisica 1 Ecuaciones EmpiricasDokument17 SeitenFisica 1 Ecuaciones EmpiricasWendyCastilloSalazarNoch keine Bewertungen
- Expocicion de Control MAÑANA1Dokument10 SeitenExpocicion de Control MAÑANA1Jhoel Quispe TiconaNoch keine Bewertungen
- SL IiiDokument17 SeitenSL Iiifernanda gaticaNoch keine Bewertungen
- Tarea No.1 DinamicaDokument35 SeitenTarea No.1 DinamicaFernando Manjon AlbisNoch keine Bewertungen
- Ajuste de CurvasDokument9 SeitenAjuste de CurvasJhon YajaNoch keine Bewertungen
- La Línea Recta PDFDokument12 SeitenLa Línea Recta PDFAngel AquinoNoch keine Bewertungen
- Oscilaciones PequeñasDokument17 SeitenOscilaciones PequeñasAmIn20122Noch keine Bewertungen
- Estimacion Mco MVDokument5 SeitenEstimacion Mco MVLeonard Gonzalo Saavedra AstopilcoNoch keine Bewertungen
- Ec. de La Recta 511Dokument33 SeitenEc. de La Recta 511Jesús ValdésNoch keine Bewertungen
- Tarea 3 Cálculo VectorialDokument17 SeitenTarea 3 Cálculo VectorialXimena GuerraNoch keine Bewertungen
- Ejercicios de Integrales de Línea, Superficie y VolumenVon EverandEjercicios de Integrales de Línea, Superficie y VolumenBewertung: 4 von 5 Sternen4/5 (2)
- Cinematica MecánicaDokument43 SeitenCinematica MecánicaAmIn20122Noch keine Bewertungen
- Cinematica-Punto MecánicaDokument31 SeitenCinematica-Punto MecánicaAmIn20122Noch keine Bewertungen
- 60 - Percusiones MecánicaDokument30 Seiten60 - Percusiones MecánicaAmIn20122Noch keine Bewertungen
- Fuentes Del Campo MagnéticoDokument15 SeitenFuentes Del Campo MagnéticoAmIn20122Noch keine Bewertungen
- Sistemas-Articulados MecánicaDokument30 SeitenSistemas-Articulados MecánicaAmIn20122Noch keine Bewertungen
- Vectores, Sistemas de CoordenadasDokument27 SeitenVectores, Sistemas de CoordenadasAmIn20122100% (2)
- Intensidad de Corriente y Densidad de CorrienteDokument9 SeitenIntensidad de Corriente y Densidad de CorrienteAmIn20122Noch keine Bewertungen
- Métodos Numéricos de Análisis CinemáticoDokument32 SeitenMétodos Numéricos de Análisis CinemáticoAmIn20122100% (1)
- Síntesis Dimensional de MecanismosDokument30 SeitenSíntesis Dimensional de MecanismosAmIn20122Noch keine Bewertungen
- Introducción Al Análisis de MecanismosDokument28 SeitenIntroducción Al Análisis de MecanismosAmIn20122Noch keine Bewertungen
- Métodos Analíticos de Análisis CinemáticoDokument13 SeitenMétodos Analíticos de Análisis CinemáticoAmIn20122Noch keine Bewertungen
- Energía Solar. FotovoltaicaDokument24 SeitenEnergía Solar. FotovoltaicaAmIn20122Noch keine Bewertungen
- Centrales Térmicas 1Dokument28 SeitenCentrales Térmicas 1AmIn20122Noch keine Bewertungen
- Movimiento PlanoDokument41 SeitenMovimiento PlanoAmIn20122Noch keine Bewertungen
- Teoría de CurvaturaDokument53 SeitenTeoría de CurvaturaAmIn20122Noch keine Bewertungen
- Dinámica de MáquinasDokument50 SeitenDinámica de MáquinasAmIn20122Noch keine Bewertungen
- Dinámica de Los Sistemas de PartículasDokument9 SeitenDinámica de Los Sistemas de PartículasAmIn20122Noch keine Bewertungen
- Romero Judith Tipo de Problemas MultiplicativosDokument1 SeiteRomero Judith Tipo de Problemas Multiplicativosapi-443909133Noch keine Bewertungen
- Estudio de IluminaciónDokument22 SeitenEstudio de IluminaciónCinthya Felo100% (1)
- Lab 7Dokument6 SeitenLab 7JONATHAN CHANGONoch keine Bewertungen
- XXXX Andalucía Física1Dokument1 SeiteXXXX Andalucía Física1rocio sanchezNoch keine Bewertungen
- Catalogo de Productos Panel ReyDokument155 SeitenCatalogo de Productos Panel Reysick216Noch keine Bewertungen
- Fuente Fija y ReguladaDokument8 SeitenFuente Fija y ReguladaSantiago Aguilar100% (2)
- Caldero DesorcionDokument3 SeitenCaldero DesorcionLuisMezaGonzalesNoch keine Bewertungen
- 7 MF - Flujo Uniforme y Diseño de Canales - 2015 - 2 para PDFDokument156 Seiten7 MF - Flujo Uniforme y Diseño de Canales - 2015 - 2 para PDFAnonymous 5PozSmkN5B0% (1)
- Pauta Evaluacion Programas NT1 y NT2Dokument44 SeitenPauta Evaluacion Programas NT1 y NT2christian galdames palma100% (1)
- Guia 3 FBDokument5 SeitenGuia 3 FBHassler M CasafrancaNoch keine Bewertungen
- Proyecto Metalurgia LatonDokument24 SeitenProyecto Metalurgia LatonAndia Guzman Romay AlexanderNoch keine Bewertungen
- Principio de Huygens AndresDokument4 SeitenPrincipio de Huygens AndresPatricia Juandavid UrquinaNoch keine Bewertungen
- Melissa Good - CompañerasDokument191 SeitenMelissa Good - CompañerasMario Rojas80% (5)
- Contraste Hipotesis 3rDokument15 SeitenContraste Hipotesis 3rCesar Cieza SantillanNoch keine Bewertungen
- T RInt SM Dom 5Dokument3 SeitenT RInt SM Dom 5santiagoNoch keine Bewertungen
- EIA RS Altagracia OritucoDokument236 SeitenEIA RS Altagracia OritucoalebrmoNoch keine Bewertungen
- Desarrollo Del CuboDokument6 SeitenDesarrollo Del CuboGloriaNoch keine Bewertungen
- Cojinetes de Contacto RodanteDokument38 SeitenCojinetes de Contacto RodanteAlejandro YugchaNoch keine Bewertungen
- Formato PreventivosDokument6 SeitenFormato PreventivosJose Manuel Mejia CañasNoch keine Bewertungen
- Historia y Evolución Del MicroscopioDokument12 SeitenHistoria y Evolución Del MicroscopioEricksen Salazar100% (1)
- Miembros en Tension CeliaDokument11 SeitenMiembros en Tension CeliaCielo Yaneth CPNoch keine Bewertungen
- Fallas en TapialDokument14 SeitenFallas en TapialChristian Chavez PereyraNoch keine Bewertungen
- Contenido de Humedad Tecnologia Del ConcretoDokument33 SeitenContenido de Humedad Tecnologia Del ConcretoEdward RtzNoch keine Bewertungen
- La Guerra de Las CorrientesDokument4 SeitenLa Guerra de Las CorrientesJoe100% (1)
- CinematicaDokument11 SeitenCinematicaerwin_carryNoch keine Bewertungen
- Cinetica ElectroquimicaDokument66 SeitenCinetica ElectroquimicaIsaac Israel Talavera BlandonNoch keine Bewertungen
- Bezier CurvesDokument10 SeitenBezier CurvesValeria ArreolaNoch keine Bewertungen