Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Texas Institute 2005Dokument105 SeitenTexas Institute 2005William SasakiNoch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Vissim 9 - ManualDokument1.065 SeitenVissim 9 - ManualWilliam Sasaki100% (7)
- Vogel 2003Dokument7 SeitenVogel 2003William SasakiNoch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Xin Et Al 2008bDokument24 SeitenXin Et Al 2008bWilliam SasakiNoch keine Bewertungen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Uno Et AlDokument6 SeitenUno Et AlWilliam SasakiNoch keine Bewertungen
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Young and Archer 2009Dokument8 SeitenYoung and Archer 2009William SasakiNoch keine Bewertungen
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Potential Real-Time Indicators of Sideswipe Crashes On FreewaysDokument18 SeitenPotential Real-Time Indicators of Sideswipe Crashes On FreewaysWilliam SasakiNoch keine Bewertungen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Minderhoud and Bovy 2001Dokument9 SeitenMinderhoud and Bovy 2001William SasakiNoch keine Bewertungen
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Svensson and Hyden 2006Dokument7 SeitenSvensson and Hyden 2006William SasakiNoch keine Bewertungen
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- Mehmood Et Al 2001Dokument10 SeitenMehmood Et Al 2001William SasakiNoch keine Bewertungen
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Miaou and Lum 1993Dokument21 SeitenMiaou and Lum 1993William SasakiNoch keine Bewertungen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Davis and Morris TRR 2009Dokument8 SeitenDavis and Morris TRR 2009William SasakiNoch keine Bewertungen
- Sayed Et Al 1994Dokument15 SeitenSayed Et Al 1994William SasakiNoch keine Bewertungen
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- Lu 2005Dokument18 SeitenLu 2005William SasakiNoch keine Bewertungen
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Gettman and Head 2003Dokument31 SeitenGettman and Head 2003William SasakiNoch keine Bewertungen
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Kosonen and Ree2000Dokument10 SeitenKosonen and Ree2000William SasakiNoch keine Bewertungen
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Subjective Evaluation of Traffic Conflicts Based On An Internal Concept of DangerousnessDokument13 SeitenThe Subjective Evaluation of Traffic Conflicts Based On An Internal Concept of DangerousnessWilliam SasakiNoch keine Bewertungen
- Guido Et Al 2009Dokument18 SeitenGuido Et Al 2009William SasakiNoch keine Bewertungen
- Hourdos 2005 - ThesisDokument334 SeitenHourdos 2005 - ThesisWilliam SasakiNoch keine Bewertungen
- Huguenin Et Al2005Dokument19 SeitenHuguenin Et Al2005William SasakiNoch keine Bewertungen
- Ga Bauer 2005Dokument15 SeitenGa Bauer 2005William SasakiNoch keine Bewertungen
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- FHWA2003Dokument126 SeitenFHWA2003William SasakiNoch keine Bewertungen
- Golob Et Al 2004Dokument14 SeitenGolob Et Al 2004William SasakiNoch keine Bewertungen
- Huguenin Et Al2005Dokument19 SeitenHuguenin Et Al2005William SasakiNoch keine Bewertungen
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Cunto Et Al 2009Dokument10 SeitenCunto Et Al 2009William SasakiNoch keine Bewertungen
- Cunto and Saccomanno CJCE 2009Dokument10 SeitenCunto and Saccomanno CJCE 2009William SasakiNoch keine Bewertungen
- Cooper and Ferguson 1976Dokument4 SeitenCooper and Ferguson 1976William SasakiNoch keine Bewertungen
- Brackstone and McDonald 2003Dokument5 SeitenBrackstone and McDonald 2003William SasakiNoch keine Bewertungen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (120)
- Brackstone Et Al 2002Dokument16 SeitenBrackstone Et Al 2002William SasakiNoch keine Bewertungen
- Complex NumbersDokument87 SeitenComplex NumbersPriya DudetteNoch keine Bewertungen
- Chapter 02b Available Solar RadiationDokument37 SeitenChapter 02b Available Solar RadiationOmar AljohaniNoch keine Bewertungen
- Vessel VolumesDokument76 SeitenVessel VolumesJosé Juan Jiménez AlejandroNoch keine Bewertungen
- Cell Name Original Value Final Value IntegerDokument5 SeitenCell Name Original Value Final Value IntegerBenmark JabayNoch keine Bewertungen
- Business Research Methods: Problem Definition and The Research ProposalDokument29 SeitenBusiness Research Methods: Problem Definition and The Research ProposalS- AjmeriNoch keine Bewertungen
- Time, Temporal Geometry, and CosmologyDokument28 SeitenTime, Temporal Geometry, and CosmologyclonejksNoch keine Bewertungen
- Sta 2200 Probability and Statistics IiDokument4 SeitenSta 2200 Probability and Statistics IimichaelNoch keine Bewertungen
- Ece198 Exam1 NotesDokument7 SeitenEce198 Exam1 NotesTRISHA ISOBELLE ARBOLEDANoch keine Bewertungen
- Model Development and Loads Analysis of An Offshore Wind Turbine On A Tension Leg Platform, With A Comparison To Other Floating Turbine ConceptsDokument129 SeitenModel Development and Loads Analysis of An Offshore Wind Turbine On A Tension Leg Platform, With A Comparison To Other Floating Turbine ConceptsUbani Obinna RanksNoch keine Bewertungen
- Test On Chapter 1.4 Non-Experimental Research: Qualitative ResearchDokument3 SeitenTest On Chapter 1.4 Non-Experimental Research: Qualitative ResearchTariq MehmoodNoch keine Bewertungen
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- 03SWDokument3 Seiten03SWKeling HanNoch keine Bewertungen
- MartingalesDokument40 SeitenMartingalesSidakpal Singh SachdevaNoch keine Bewertungen
- 8 A Train Travels 9 KM From Station A To Station BDokument2 Seiten8 A Train Travels 9 KM From Station A To Station BYu SunNoch keine Bewertungen
- Syllabus Mathematics in The Modern WorldDokument19 SeitenSyllabus Mathematics in The Modern WorldJham L. PatraNoch keine Bewertungen
- Practice Paper: I. Candidates Are Informed That Answer Sheet Comprises TwoDokument19 SeitenPractice Paper: I. Candidates Are Informed That Answer Sheet Comprises TwoRashid Ibn AkbarNoch keine Bewertungen
- S&T HEX Design Kern ModelDokument4 SeitenS&T HEX Design Kern ModelWasim RazaNoch keine Bewertungen
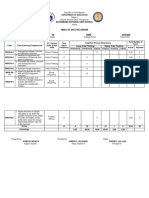
- Tos Math 8 3RD QuarterDokument2 SeitenTos Math 8 3RD Quarterrmm041550% (2)
- SmalloscillationsDokument12 SeitenSmalloscillationsrajbaxeNoch keine Bewertungen
- m2 CH 3 Binomial Theorem Supp ExDokument1 Seitem2 CH 3 Binomial Theorem Supp Exapi-303501215Noch keine Bewertungen
- Friends Global 10 - Unit 6 - Grammar TestDokument3 SeitenFriends Global 10 - Unit 6 - Grammar TestThảo NgôNoch keine Bewertungen
- CaissonDokument12 SeitenCaissonjohnnyoliveiraNoch keine Bewertungen
- Multinomial Logistic Regression Models: Newsom Psy 525/625 Categorical Data Analysis, Spring 2021 1Dokument5 SeitenMultinomial Logistic Regression Models: Newsom Psy 525/625 Categorical Data Analysis, Spring 2021 1Deo TuremeNoch keine Bewertungen
- Physics 119A Midterm Solutions 1 PDFDokument3 SeitenPhysics 119A Midterm Solutions 1 PDFHenry JurneyNoch keine Bewertungen
- Physics ElasticityDokument23 SeitenPhysics ElasticityDaniel Danille KristianNoch keine Bewertungen
- Further Maths Week 9 Notes For SS2 PDFDokument11 SeitenFurther Maths Week 9 Notes For SS2 PDFsophiaNoch keine Bewertungen
- Chemical Engineering Plant Economics MCQ Questions & Answers - Chemical EngineeringDokument6 SeitenChemical Engineering Plant Economics MCQ Questions & Answers - Chemical Engineeringsrinu02062Noch keine Bewertungen
- Engineering Mechanics PPT 1Dokument48 SeitenEngineering Mechanics PPT 1muralikrishna1917100% (3)
- Differential Calculus - Module 1Dokument7 SeitenDifferential Calculus - Module 1Noel S. De Juan Jr.Noch keine Bewertungen
- CMC PresentationDokument34 SeitenCMC PresentationSandeep Kumar Sinha100% (2)
- Ejercicios Resueltos Efecto ComptonDokument7 SeitenEjercicios Resueltos Efecto ComptonSäntiiäGo Burgös PuëntësNoch keine Bewertungen
- Pressure Vessels: Design, Formulas, Codes, and Interview Questions & Answers ExplainedVon EverandPressure Vessels: Design, Formulas, Codes, and Interview Questions & Answers ExplainedBewertung: 5 von 5 Sternen5/5 (1)
- The Laws of Thermodynamics: A Very Short IntroductionVon EverandThe Laws of Thermodynamics: A Very Short IntroductionBewertung: 4.5 von 5 Sternen4.5/5 (10)
- Offshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsVon EverandOffshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsNoch keine Bewertungen
- Einstein's Fridge: How the Difference Between Hot and Cold Explains the UniverseVon EverandEinstein's Fridge: How the Difference Between Hot and Cold Explains the UniverseBewertung: 4.5 von 5 Sternen4.5/5 (51)