Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- RRDokument4 SeitenRRmanojsethiNoch keine Bewertungen
- Introduction To Job Seeker Website Devel PDFDokument139 SeitenIntroduction To Job Seeker Website Devel PDFmanojsethiNoch keine Bewertungen
- MB0050 B1700 MQPDokument21 SeitenMB0050 B1700 MQPmanojsethiNoch keine Bewertungen
- MB0050 B1700 MQPDokument21 SeitenMB0050 B1700 MQPmanojsethiNoch keine Bewertungen
- SQL Practice QuestionsXIIDokument7 SeitenSQL Practice QuestionsXIImanojsethiNoch keine Bewertungen
- Report On HDFC Bank WWW - GameswalaDokument116 SeitenReport On HDFC Bank WWW - GameswalaVikas GuptaNoch keine Bewertungen
- Successful Entreprenuers DoDokument83 SeitenSuccessful Entreprenuers DomanojsethiNoch keine Bewertungen
- MB0050 Slides Unit 01Dokument13 SeitenMB0050 Slides Unit 01manojsethiNoch keine Bewertungen
- Report On HDFC Bank WWW - GameswalaDokument116 SeitenReport On HDFC Bank WWW - GameswalaVikas GuptaNoch keine Bewertungen
- Warehouse Solution DesignDokument2 SeitenWarehouse Solution DesignmanojsethiNoch keine Bewertungen
- Maurice Nicoll The Mark PDFDokument4 SeitenMaurice Nicoll The Mark PDFErwin KroonNoch keine Bewertungen
- DesciptionDokument1 SeiteDesciptionmanojsethiNoch keine Bewertungen
- Alu VHDLDokument2 SeitenAlu VHDLmanojsethiNoch keine Bewertungen
- IndiaDokument2 SeitenIndiamanojsethiNoch keine Bewertungen
- How BIOS Works (Graphical)Dokument1 SeiteHow BIOS Works (Graphical)manojsethiNoch keine Bewertungen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- ElectronicsToday1984 08Dokument72 SeitenElectronicsToday1984 08Sovi SoviNoch keine Bewertungen
- SIEMENSDokument13 SeitenSIEMENSDaniela Denisse TRNoch keine Bewertungen
- Electric Drive Truck: Gross Horsepower Nominal GVWDokument20 SeitenElectric Drive Truck: Gross Horsepower Nominal GVWanzhen wangNoch keine Bewertungen
- Selected Objective Question On Introduction To Computers With Answer Set 5Dokument27 SeitenSelected Objective Question On Introduction To Computers With Answer Set 5Ankit JainNoch keine Bewertungen
- Grand c4 PicassoDokument352 SeitenGrand c4 PicassoBenild Shaqiri0% (1)
- Buried Filled Cables Type CefeDokument5 SeitenBuried Filled Cables Type CefeKhaled BellegdyNoch keine Bewertungen
- Application Note Gan Bias Circuit DesignDokument6 SeitenApplication Note Gan Bias Circuit DesignAnonymous 3mJfZENoch keine Bewertungen
- Terminations: Underground Electric Distribution StandardsDokument20 SeitenTerminations: Underground Electric Distribution StandardsHendrix LevaNoch keine Bewertungen
- Engine Torque Settings and Spec's 3.0L V6 SCDokument4 SeitenEngine Torque Settings and Spec's 3.0L V6 SCMario MaravillaNoch keine Bewertungen
- KD 65 X 8000 CDokument98 SeitenKD 65 X 8000 CkalleNoch keine Bewertungen
- Maintain stand-alone solar PV systemsDokument14 SeitenMaintain stand-alone solar PV systemsEdmund YoongNoch keine Bewertungen
- 310nom B5Dokument116 Seiten310nom B5Naidan DensmaaNoch keine Bewertungen
- XQ500 Spec SheetDokument4 SeitenXQ500 Spec Sheetvbazan5299100% (1)
- PDF Document (569802)Dokument120 SeitenPDF Document (569802)Elvira RodNoch keine Bewertungen
- ELE3-18 MostUpdated 04052022Dokument43 SeitenELE3-18 MostUpdated 04052022葉朗Noch keine Bewertungen
- RTS5138 One-LUN USB 2.0 Card Reader Controller DatasheetDokument13 SeitenRTS5138 One-LUN USB 2.0 Card Reader Controller Datasheetari factoryNoch keine Bewertungen
- First Issue 13/1/2021 0: A.Fathy A.AbdelrazikDokument7 SeitenFirst Issue 13/1/2021 0: A.Fathy A.AbdelrazikAhmed El HadidyNoch keine Bewertungen
- Horizontal Multi-Stage Pumps: Component MaterialDokument2 SeitenHorizontal Multi-Stage Pumps: Component MaterialBrayan CJNoch keine Bewertungen
- CPU fan controller project uses PSOC for temperature-based speed controlDokument4 SeitenCPU fan controller project uses PSOC for temperature-based speed controlmantoruleNoch keine Bewertungen
- Feeder Protection System: Grid SolutionsDokument328 SeitenFeeder Protection System: Grid SolutionsVuiLênNàoNoch keine Bewertungen
- Technical Hager PDFDokument32 SeitenTechnical Hager PDFjohnvar04Noch keine Bewertungen
- Machine Design Trial QuestionsDokument13 SeitenMachine Design Trial QuestionsJerdNoch keine Bewertungen
- Arduino PWM and Analog Output GuideDokument29 SeitenArduino PWM and Analog Output GuideLê TrungNoch keine Bewertungen
- Land Rover Factory D3 Air Suspension DescriptionDokument22 SeitenLand Rover Factory D3 Air Suspension Descriptionhelen100% (1)
- Last Herb 204 SLDokument3 SeitenLast Herb 204 SLlastbikesNoch keine Bewertungen
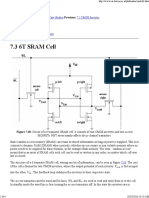
- 7.3 6T SRAM Cell: 7.4 Ring Oscillator 7. Case Studies 7.2 CMOS InverterDokument4 Seiten7.3 6T SRAM Cell: 7.4 Ring Oscillator 7. Case Studies 7.2 CMOS InverterGowtham SpNoch keine Bewertungen
- Fits and Clearances - Contents: Propeller Maintenance Manual 132ADokument8 SeitenFits and Clearances - Contents: Propeller Maintenance Manual 132AAlexis KidemaNoch keine Bewertungen
- PUMA M5.2EX maintenance and exploded viewsDokument1 SeitePUMA M5.2EX maintenance and exploded viewsJORGE C. CHAO R.Noch keine Bewertungen
- Bennic (Bi-Polar Radial-Axial) B03 SeriesDokument3 SeitenBennic (Bi-Polar Radial-Axial) B03 Seriesester853Noch keine Bewertungen