Das könnte Ihnen auch gefallen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Embedded System - Zero To Hero For Beginner ModuleDokument38 SeitenEmbedded System - Zero To Hero For Beginner ModuleadamwaizNoch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Electrical Machines-Ch2-DcmotorDokument93 SeitenElectrical Machines-Ch2-DcmotoradamwaizNoch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Ac Generators: Compiled and Presented by Doren NedrickDokument20 SeitenAc Generators: Compiled and Presented by Doren Nedrickadamwaiz100% (1)
- Pic18 Serial CommunicationDokument25 SeitenPic18 Serial Communicationadamwaiz100% (3)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Pic18 Hardware InterfacingDokument9 SeitenPic18 Hardware Interfacingadamwaiz100% (2)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Experiment 1Dokument7 SeitenExperiment 1adamwaizNoch keine Bewertungen
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Embedded System - Zero To Hero For Beginner ModuleDokument38 SeitenEmbedded System - Zero To Hero For Beginner ModuleadamwaizNoch keine Bewertungen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Chapter2 - TimersDokument26 SeitenChapter2 - Timersadamwaiz100% (1)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Pic18 Interrupt 2Dokument19 SeitenPic18 Interrupt 2adamwaiz100% (3)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The University of Texas at Arlington Timers, Capture/Compare/PWMDokument22 SeitenThe University of Texas at Arlington Timers, Capture/Compare/PWMadamwaiz100% (1)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Chapter5-Pic Programming in CDokument53 SeitenChapter5-Pic Programming in Cadamwaiz93% (14)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
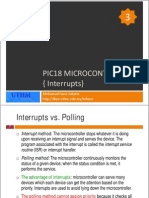
- Pic18 InterruptDokument14 SeitenPic18 Interruptadamwaiz100% (4)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- Pic18 AdcDokument10 SeitenPic18 Adcadamwaiz100% (3)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Pic18f4550 2550Dokument10 SeitenPic18f4550 2550PAUL BALLARTANoch keine Bewertungen
- PLC IntroDokument131 SeitenPLC IntroadamwaizNoch keine Bewertungen
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Chapter2-Microcontroller Architecture & Assembly Language Pt3Dokument36 SeitenChapter2-Microcontroller Architecture & Assembly Language Pt3adamwaiz100% (2)
- Lab No. 6 Title: Robotic Arm Programming ObjectiveDokument7 SeitenLab No. 6 Title: Robotic Arm Programming ObjectiveadamwaizNoch keine Bewertungen
- Lab 1 Ec501Dokument8 SeitenLab 1 Ec501adamwaizNoch keine Bewertungen
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Tugasan 1 Ec302 EcadDokument1 SeiteTugasan 1 Ec302 EcadadamwaizNoch keine Bewertungen
- Chapter3-Input Output Ports ProgrammingDokument26 SeitenChapter3-Input Output Ports Programmingadamwaiz100% (1)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Bipolar Junction Transistor: Unit 3Dokument56 SeitenBipolar Junction Transistor: Unit 3adamwaizNoch keine Bewertungen
- Tugasan 2 Ec302 EcadDokument3 SeitenTugasan 2 Ec302 EcadadamwaizNoch keine Bewertungen
- EE201 Notes 1 Introduction To SemiconductorDokument18 SeitenEE201 Notes 1 Introduction To SemiconductoradamwaizNoch keine Bewertungen
- Multistages AmplifierDokument27 SeitenMultistages Amplifieradamwaiz50% (2)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Ee201 Notes 5Dokument46 SeitenEe201 Notes 5adamwaiz100% (2)
- 06-Apache SparkDokument75 Seiten06-Apache SparkTarike ZewudeNoch keine Bewertungen
- Exp. 5 - Terminal Characteristis and Parallel Operation of Single Phase Transformers.Dokument7 SeitenExp. 5 - Terminal Characteristis and Parallel Operation of Single Phase Transformers.AbhishEk SinghNoch keine Bewertungen
- HandloomDokument4 SeitenHandloomRahulNoch keine Bewertungen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- ATPDraw 5 User Manual UpdatesDokument51 SeitenATPDraw 5 User Manual UpdatesdoniluzNoch keine Bewertungen
- HSBC in A Nut ShellDokument190 SeitenHSBC in A Nut Shelllanpham19842003Noch keine Bewertungen
- Doas - MotorcycleDokument2 SeitenDoas - MotorcycleNaojNoch keine Bewertungen
- Wiley Chapter 11 Depreciation Impairments and DepletionDokument43 SeitenWiley Chapter 11 Depreciation Impairments and Depletion靳雪娇Noch keine Bewertungen
- 450i User ManualDokument54 Seiten450i User ManualThượng Lê Văn0% (2)
- Channel Tables1Dokument17 SeitenChannel Tables1erajayagrawalNoch keine Bewertungen
- 3412C EMCP II For PEEC Engines Electrical System: Ac Panel DC PanelDokument4 Seiten3412C EMCP II For PEEC Engines Electrical System: Ac Panel DC PanelFrancisco Wilson Bezerra FranciscoNoch keine Bewertungen
- Amare Yalew: Work Authorization: Green Card HolderDokument3 SeitenAmare Yalew: Work Authorization: Green Card HolderrecruiterkkNoch keine Bewertungen
- 199437-Unit 4Dokument36 Seiten199437-Unit 4Yeswanth rajaNoch keine Bewertungen
- Accomplishment ReportDokument1 SeiteAccomplishment ReportMaria MiguelNoch keine Bewertungen
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Properties of Moist AirDokument11 SeitenProperties of Moist AirKarthik HarithNoch keine Bewertungen
- Internship ReportDokument46 SeitenInternship ReportBilal Ahmad100% (1)
- LMU-2100™ Gprs/Cdmahspa Series: Insurance Tracking Unit With Leading TechnologiesDokument2 SeitenLMU-2100™ Gprs/Cdmahspa Series: Insurance Tracking Unit With Leading TechnologiesRobert MateoNoch keine Bewertungen
- Lea 4Dokument36 SeitenLea 4Divina DugaoNoch keine Bewertungen
- DesalinationDokument4 SeitenDesalinationsivasu1980aNoch keine Bewertungen
- Lending OperationsDokument54 SeitenLending OperationsFaraz Ahmed FarooqiNoch keine Bewertungen
- PC210 8M0Dokument8 SeitenPC210 8M0Vamshidhar Reddy KundurNoch keine Bewertungen
- Sourcing Decisions in A Supply Chain: Powerpoint Presentation To Accompany Powerpoint Presentation To AccompanyDokument58 SeitenSourcing Decisions in A Supply Chain: Powerpoint Presentation To Accompany Powerpoint Presentation To AccompanyAlaa Al HarbiNoch keine Bewertungen
- BSCSE at UIUDokument110 SeitenBSCSE at UIUshamir mahmudNoch keine Bewertungen
- Final ExamSOMFinal 2016 FinalDokument11 SeitenFinal ExamSOMFinal 2016 Finalkhalil alhatabNoch keine Bewertungen
- Income Statement, Its Elements, Usefulness and LimitationsDokument5 SeitenIncome Statement, Its Elements, Usefulness and LimitationsDipika tasfannum salamNoch keine Bewertungen
- Analysis of Material Nonlinear Problems Using Pseudo-Elastic Finite Element MethodDokument5 SeitenAnalysis of Material Nonlinear Problems Using Pseudo-Elastic Finite Element MethodleksremeshNoch keine Bewertungen
- Cancellation of Deed of Conditional SalDokument5 SeitenCancellation of Deed of Conditional SalJohn RositoNoch keine Bewertungen
- The Internal Environment: Resources, Capabilities, Competencies, and Competitive AdvantageDokument5 SeitenThe Internal Environment: Resources, Capabilities, Competencies, and Competitive AdvantageHenny ZahranyNoch keine Bewertungen
- Intermediate Accounting (15th Edition) by Donald E. Kieso & Others - 2Dokument11 SeitenIntermediate Accounting (15th Edition) by Donald E. Kieso & Others - 2Jericho PedragosaNoch keine Bewertungen
- Assignment - 2: Fundamentals of Management Science For Built EnvironmentDokument23 SeitenAssignment - 2: Fundamentals of Management Science For Built EnvironmentVarma LakkamrajuNoch keine Bewertungen
- Recommended Practices For Developing An Industrial Control Systems Cybersecurity Incident Response CapabilityDokument49 SeitenRecommended Practices For Developing An Industrial Control Systems Cybersecurity Incident Response CapabilityJohn DavisonNoch keine Bewertungen