Das könnte Ihnen auch gefallen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- 2015 Leelavathi-RajuDokument7 Seiten2015 Leelavathi-RajuRaju KuruvaNoch keine Bewertungen
- 2014 Anand Reddy-RajuDokument9 Seiten2014 Anand Reddy-RajuRaju KuruvaNoch keine Bewertungen
- 2014 Divya Prasanna-RajuDokument7 Seiten2014 Divya Prasanna-RajuRaju KuruvaNoch keine Bewertungen
- 4 Publishedpaper (138 September 2019)Dokument6 Seiten4 Publishedpaper (138 September 2019)Raju KuruvaNoch keine Bewertungen
- Project Thesis FinalDokument64 SeitenProject Thesis FinalMohamed AlkamalyNoch keine Bewertungen
- Algirithm To Reduce CostDokument5 SeitenAlgirithm To Reduce CostRaju KuruvaNoch keine Bewertungen
- Variable Frequency DrivesDokument11 SeitenVariable Frequency DrivesLavanya VallbhareddyNoch keine Bewertungen
- MATLAB FunctionDokument27 SeitenMATLAB FunctionRaju KuruvaNoch keine Bewertungen
- 5.2 MATLAB CodeDokument3 Seiten5.2 MATLAB CodeRaju KuruvaNoch keine Bewertungen
- Load Frequency ControlDokument3 SeitenLoad Frequency ControlRaju KuruvaNoch keine Bewertungen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Oracle Exadata Technical Series: Smart ScanDokument59 SeitenOracle Exadata Technical Series: Smart ScanVishnusivathej PotukanumaNoch keine Bewertungen
- Astm A769 PDFDokument5 SeitenAstm A769 PDFCristian OtivoNoch keine Bewertungen
- L19 External DiffusionDokument30 SeitenL19 External DiffusionEga NabellaNoch keine Bewertungen
- CP R70 Smart View Monitor Admin GuideDokument106 SeitenCP R70 Smart View Monitor Admin Guideoorhan41Noch keine Bewertungen
- Up-F-020 Solicitud de Admisión de Practicantes Ver-08Dokument108 SeitenUp-F-020 Solicitud de Admisión de Practicantes Ver-08MARCOS RODOLFO MALDONADO ZEVALLOSNoch keine Bewertungen
- Various Allowances Referred To 7th CPCDokument73 SeitenVarious Allowances Referred To 7th CPCGiri KumarNoch keine Bewertungen
- An-And-1-106 Basic CAN Bit TimingDokument9 SeitenAn-And-1-106 Basic CAN Bit TimingNavneet Singh Pathania100% (1)
- PSC Girder MethodologyDokument12 SeitenPSC Girder MethodologySaurabh KumarNoch keine Bewertungen
- Saurabh ShrivastavaDokument37 SeitenSaurabh ShrivastavaMahendraNoch keine Bewertungen
- SIMODUAL2 Industrial Double Containment Piping System - Dual Pipes For Double The ProtectionDokument32 SeitenSIMODUAL2 Industrial Double Containment Piping System - Dual Pipes For Double The Protectionrade.paripovicNoch keine Bewertungen
- Specific Gravity 20mmDokument4 SeitenSpecific Gravity 20mmIsaiahogedaNoch keine Bewertungen
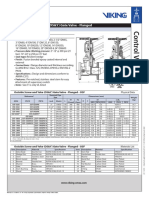
- Outside Screw and Yoke (OS&Y) Gate Valve - Flanged: Technical FeaturesDokument2 SeitenOutside Screw and Yoke (OS&Y) Gate Valve - Flanged: Technical FeaturesMark Louie GuintoNoch keine Bewertungen
- Kathrein 739506Dokument2 SeitenKathrein 739506Carlos CostaNoch keine Bewertungen
- Parts Catalog: F Y 8 - 3 1 F X - 0 0 0Dokument86 SeitenParts Catalog: F Y 8 - 3 1 F X - 0 0 0julian gonzalezNoch keine Bewertungen
- Procurement Guideline For ATL SchoolsDokument4 SeitenProcurement Guideline For ATL SchoolsManKapNoch keine Bewertungen
- Dimitrios Iliadelis - Effect of Deep Excavation On An Adjacent Pile FoundationDokument77 SeitenDimitrios Iliadelis - Effect of Deep Excavation On An Adjacent Pile Foundationmateus456Noch keine Bewertungen
- Msi ms-7222 Rev 3.0 SCH PDFDokument30 SeitenMsi ms-7222 Rev 3.0 SCH PDFRodney RibeiroNoch keine Bewertungen
- Artificial Intelligence Questions&Ans Uninformed SearchDokument5 SeitenArtificial Intelligence Questions&Ans Uninformed Searchjaijohnk83% (6)
- Metco 16C 10-040Dokument8 SeitenMetco 16C 10-040JSH100Noch keine Bewertungen
- Scenario of Shale Gas Exploration in IndiaDokument24 SeitenScenario of Shale Gas Exploration in IndiaManish TiwariNoch keine Bewertungen
- MMTI Literature ReviewDokument39 SeitenMMTI Literature ReviewGargee GhoshNoch keine Bewertungen
- Liquid Gas Absorption ProcessDokument89 SeitenLiquid Gas Absorption ProcessMohd Masri A. RazakNoch keine Bewertungen
- Jura Subito Operating Instructions Automatic 2 Cup Espresso Coffee MachineDokument15 SeitenJura Subito Operating Instructions Automatic 2 Cup Espresso Coffee MachineyangNoch keine Bewertungen
- Mole Reactions and Stoichiometry MultipleDokument25 SeitenMole Reactions and Stoichiometry MultiplelinaNoch keine Bewertungen
- KEDDCO BinderDokument74 SeitenKEDDCO BinderWillian FigueroaNoch keine Bewertungen
- Motherboard Specifications, K8N8X-LA (Diablo) HP Pavilion T650.be Desktop PC - HP Customer Care (United States - English)Dokument5 SeitenMotherboard Specifications, K8N8X-LA (Diablo) HP Pavilion T650.be Desktop PC - HP Customer Care (United States - English)jpntjpntNoch keine Bewertungen
- Powered by QFD OnlineDokument1 SeitePowered by QFD OnlineNiswa RochimNoch keine Bewertungen
- Java SampleExamQuestionsDokument18 SeitenJava SampleExamQuestionshmasryNoch keine Bewertungen
- Figure 7.4 - Roughly One Third of The Projects Studied WereDokument9 SeitenFigure 7.4 - Roughly One Third of The Projects Studied WerelenanaNoch keine Bewertungen
- Códigos de Falhas Hyundai R3607ADokument13 SeitenCódigos de Falhas Hyundai R3607AGuemep GuemepNoch keine Bewertungen