The International Journal of Engineering And Science (IJES) ||Volume|| 1 ||Issue|| 2 ||Pages|| 19-25 ||2012|| ISSN: 2319 1813
3 ISBN: 2319 1805
HAND SIGN INTERPRETER
1,
Ajinkya Raut, 2,Vineeta Singh, 3,Vikrant Rajput, 4,Ruchika Mahale
1,2,3,4,
PES MCOE, PUNE
--------------------------------------------------------------- Abstract-----------------------------------------------------------For many deaf people, sign language is the principle means of communication. Normal people around such cases end up facing problems while communicating. This system prototype that is able to automatically recognize sign language to help normal people to communicate more effectively with speech impaired people. This system recognizes the hand signs with the help of specially designed gloves. These recognized gestures are translated into a voice signal in real time. Thus this system reduces the communication gap between normal and the speech impaired people. Keywordsspeech impaired, hand signs, sensor glove, easy communication.
----------------------------------------------------------------------------------------------------------------Date of Submission: 16, November, 2012 Date of Publication: 5,December 2012
---------------------------------------------------------------------------------------------------------------1. INTRODUCTION
Sign Language Interpreter is a recognition system for the vocally disabled. We have turned to glovebased technique as it is more practical in gesture recognition which involves the use of specially designed sensor glove which produces a signal corresponding to the hand sign. As the performance of the glove is not affected by light, electric or magnetic fields or any other disturbance, the data that is generated is accurate. The processor analyses the signal and fetches the corresponding audio signal from the memory IC which is fed to the amplifier. The speaker generates the relevant sound. As the system uses the low cost and easily available sensors and ICs the system is very much cost effective.
2. LITERATURE SURVEY
In the recent years, there has been tremendous research on the hand sign recognition. The technology of gesture recognition is divided into two categories Vision-based In vision-based methods, computer camera is the input device for observing the information of hands or fingers. The Vision Based methods require only a camera, thus realizing a natural interaction between humans and computers without the use of any extra devices. These systems tend to complement biological vision by describing artificial vision systems that are implemented in software and/or hardware. This poses a challenging problem as these systems need to be background invariant, lighting insensitive, person and camera independent to achieve real time performance. Moreover, such systems must be optimized to meet the requirements, including accuracy and robustness. [5] Glove-based methods In glove based systems data gloves are used which can archive the accurate positions of hand gestures as its positions are directly measured. The Data-Glove based methods use sensor devices for digitizing hand and finger motions into multi-parametric data. The extra sensors make it easy to collect hand configuration and movement. However, the devices are quite expensive and bring much cumbersome experience to the users Some of the earlier gesture recognition systems attempted to identify gestures using glove-based devices that would measure the position and joint angles of the hand. However, these devices are very cumbersome and usually have many cables connected to a computer. This has brought forth the motivation of using non-intrusive, vision-based approaches for recognizing gestures Also the sensors used for the detection of the sign language and the gesture recognition in the system that are available in the market are quite costly.
www.theijes.com
THE IJES
Page 19
Hand Sign Interpreter
In computer recognition of spoken language, speech data is captured using a microphone connected to an ADC. Similarly a data-capturing device is also required in order to recognize sign language; in this case measuring the position and movement of the signer's hands [1]. Two broad categories of input hardware have been used for recognition of hand gestures glove-based devices such as those used by Kramer et al (1989) [4] and Fels et al (1993) [2], and camera-based systems as used by Holden (1993). The latter approach has some benefits, particularly as it does not require specialized hardware, but this is offset by the complexity of the computer vision problems faced in extracting the necessary data about the hands from a visual image. Therefore for this research glove-based input was used, as this allowed the research effort to be focused on the area of sign recognition rather than that of data capturing The specific input devices used in developing SLARTI were a Cyber Glove, and a Polhemus Iso Trak. The Cyber Glove measures the degree of flexing of the various joints of the hand and wrist. The version of the Cyber Glove used for this research provides 18 sensors. The Polhemus allows tracking of the spatial position and orientation of the hand with respect to the fixed electro-magnetic source [1].Linguistic analysis of sign language has revealed that signs can be described in terms of four basic manual features, which may be modified in meaning by more subtle factors such as body language and facial expression [3]. The hand shape defines the configuration of the joints of the hand. Orientation specifies the direction in which the hand and fingers are pointing, whilst the place of articulation is the location of the hand relative to the body. The most complex feature is motion, which consists of a change over time of any combination of the other three. The task of transforming a stream of input data directly into a classification of the sign is an extremely difficult task. The approach taken within SLARTI was to initially process the input data so as to produce a description of this sequence in terms of the four features discussed above. The sign is classified on this basis. The SLARTI system consists of four separate feature-extraction neural networks each trained specifically to recognize one of the features of the sign. This approach of decomposing the problem and applying a modular structure of networks has a number of benefits. First, as demonstrated on the task of speech-recognition by Waibeletal (1989), it allows the use of several smaller networks rather than one massive network and thereby reduces the amount of training time and data required. It may also result in superior classification accuracy. Second, it produces a system which can more easily be extended. The features recognized by the feature-extraction networks are expressive enough to describe an extremely large number of signs, not all of which may be recognized by the final classifier. If the vocabulary of the system is to be extended then only the final classifier will require modification. This greatly reduces the costs involved in performing such expansion of the system, and makes it practical to tailor the vocabulary of the system to a particular user. Projects available in market: In the recent era, there has been tremendous development in the work of sign language interpretation. Many systems have been designed for gesture recognition. Depending upon the two categories many systems are now available in the market. 1. Vision-based 2. Glove-based Comparison: In case of vision- based gesture recognition systems, a lot of the digital signal processing has to be done. Also there require large programming. Because of this the response of the system is quite slow. Also the electric, magnetic fields, and any other disturbances may affect the performance of the system. In case of glove-based sign language recognition system that is available in the market lot of the hardware is required. Large numbers of cables have to be connected to the computers for monitoring the data. Hence the systems require lot of space. Also the system is not handy. In case of our project flex sensors that we are using are of low cost. Also the ARM processor that we use in our process is very compact. Hence the space required for our system is very less compared to the other projects that are available in the market. Thus the system is portable. Performance of the system is not affected by the disturbances. Here we are converting hand signs in to the corresponding speech signal; hence the system is the proper means of effective communication. As the hardware required in designing are low cost, the overall cost of the system is less compared to the other systems available in the market, and it is the system is flexible enough for a user to add, modify or delete a hand sign.
www.theijes.com
THE IJES
Page 20
Hand Sign Interpreter
3. RESEARCH ELABORATIONS: SYSTEM HARDWARE: System hardware consists of an accelerometer and Flex sensors attached to the glove which are the input devices. The signal so generated by these two sensors is given to the voltage divider and then to the processor i.e. LPC2138 which acts as the heart of the system. Flex sensors made up of resistive carbon element shows the property of change in resistance according to the bending of sensor (fingers). Five Flex sensors are mounted on five fingers of the hand. Accelerometer works on the concept of gravity and serves the purpose of sensing the direction. The output of the Flex sensor is the varying resistance which is converted into a voltage signal using a voltage divider bias circuit. Further, the accelerometer output and the voltage signal are provided to the inbuilt ADC of the processor. The received output from the sensors is continuously monitored.rocessor is interfaced with a memory IC which acts as an input/output device. Various audio files are recorded and then stored in the memory IC for the different hand signs (signals). Thus the processor acts as master and the external memory acts as slave. Depending on the output voltage from the Flex sensors and the accelerometer, processor checks the ADC count in the lookup table and if an audio signal corresponding to the ADC count is found then the audio signal is fetched from the memory IC (external memory). The data so fetched which is in the digital form is converted into an analog signal and provided to the amplifier and thus to the speaker. LCD is used to display the corresponding output, thus serves an important role for cross-verification. The output of the processor is quite weak to drive the loudspeaker. Thus an audio amplifier comes into the picture. The output taken from the processor acting as an input to the audio amplifier is in the form of an analog signal. That is facilitated by DAC which is inbuilt in the processor. Speaker, at the end of the system plays the corresponding audio file.Using only a single glove restricts the system to the recognition of one-handed signs (and hence eliminates the possibility of recognizing the Auslan manual alphabet which is two-handed), but it is envisaged that the techniques used in developing the system could be extended to two-handed signs if appropriate input hardware was available.
Fig. 1 Block diagram of system Flex Sensors: The output the Flex sensor is in the form of the variable resistance. As the fingers are bend the resistance of the Flex sensor changes. This property is shown below
Working of Flex sensor
www.theijes.com
THE IJES
Page 21
Hand Sign Interpreter
Fig. 2 Voltage divider for flex sensors Electrical Specifications: 1. Flat resistance : 25 k ohms 2. Tolerance : 30% 3. Bend Resistance Range : 45k to 125k ohms Accelerometer: In the system a 3 axis accelerometer is used. Accelerometer works on the principle of the gravitational force. Accelerometer Output changes according to the inclination, in response to the movement of the mass inside. To maintain the simplicity in the prototype we are considering only the 2 dimensional models. Accelerometer provides temperature compensation and g-select option which allow selection among 4 different type of sensitivity. It can be directly interfaced to the ADC. Table I: Gravity Selection Table g-select 2 0 0 1 1 g -select 1 0 1 0 1 g range 1.5g 2g 4g 6g Sensitivity 800mV/g 600mV/g 300mV/g 200mV/g
LPC2138: It belongs to ARM7TDMI family. LPC stands for low power consumption. Features: 32 bit RISC processor. Hardware Debug Technology. Load store architecture. 512 KB flash memory. 32 KB RAM. ADC (Analog to Digital Convertor): It uses 10 bit successive approximation technique. Input multiplexing among the 6 channels of ADC0 and 8 channels of ADC1 can be done. The 10 bit conversion time is approximately 2.44 us. DAC (Digital to Analog Convertor): The 10 bit DAC uses resistor string architecture. It produces buffered output. UART (Universal Asynchronous Receiver Transmitter): The Universal Asynchronous Receiver/Transmitter (UART) takes bytes of data from the LPC1238 and transmits the individual bits in a sequential fashion which is received at the other side i.e. AT45db161. It has got FIFOs capable of receiving and transmitting 16 bytes of data. It has got built-in fractional baud rate generator with autobauding capabilities. It uses the mechanism that enables software and hardware flow control implementation.
www.theijes.com
THE IJES
Page 22
Hand Sign Interpreter
SPI (Serial Peripheral Interface): SPI is a full duplex serial interfaces. It can handle multiple masters and slaves being connected to a given bus. Only a single master and a single slave can communicate on the interface during a given data transfer. During a data transfer, the master always sends 8 to 16 bits of data to the slave, and the slave always sends a byte of data to the master. The maximum bit rate of data is one eighth of the input clock rate.
AT45db161: Memory IC is Electronically Erasable Programmable Read Only Memory (EEPROM), which is used in portable devices. It provides a rapid serial peripheral interface, where 66 MHz is the max clock frequency. It also provides a page program operation and user configurable page size. With presence of various erase options the process become convenient. LM386: The LM386 is a power amplifier designed for use in low voltage consumer applications. Its a versatile amplifier which can be used for different gains. The gain is set as 20 by default but it can be changed by changing the components between Pin no.1 and Pin no.8. Software Design: Getting the analog input from the sensors and converting it into digital form is one of the crucial parts, for this purpose different registers are used. ADCR, ADGDR, ADDR0, DACR... are used to control and monitor the process. 1. 2. 3. ADCR (A/D Control Register): The ADCR register must be written to select the operating mode before A/D conversion can occur. ADGDR (A/D Global Data Register): This register contains the ADCs DONE bit and the result of the most recent A/D conversion. The count is stored ADDR0 (A/D Channel 0 Data Register): This register contains the result of the most recent conversion completed on channel 0.
After fetching the audio signal and sending to the speaker DACR comes into picture. 4. DACR (D/A Control Register): This read/write register includes the digital value to be converted to analog, and a bit that trades off performance vs. power. Bits 5:0 are reserved for future, higher-resolution D/A converters. Writing a file in the memory IC: For the output to be an audio data the audio file should be stored in the memory IC. For this purpose SPI (serial peripheral interface) and UART (universal asynchronous receiver/transmitter) are used. The data is transferred in form of pages. Using the code set, the local buffers and SPI are initialized. There are two local buffers 1 and 2 of size 528 Kbytes each, are used for sending and receiving of the data serially. The data file is first taken into the local buffer 1 as soon as it is full the data is now taken into the local buffer 2 and data from the local buffer 1 is send to the memory IC to a specific location. As soon as buffer 2 is full its switched back to buffer 1 and the process continues the same way until whole data is written into the memory IC. Reading a file from a memory IC: On the other hand while reading a file from the memory; we use an address to fetch a file from its location. The same process is repeated only in a reverse manner, where the data is transferred from memory IC to the processor. Result And Discussion: Application: Being an application based project it only serves as nullifying the communication medium between dumb and normal people.
www.theijes.com
THE IJES
Page 23
Hand Sign Interpreter
Future Modification 1. With a little modification these hand signs can be used for operating vehicles. The various operations like taking turns, starting or stopping vehicles can be implemented efficiently. 2. The system can be modified to be a wireless one in such a way that it will minimize the complexity while using. Without the wirings around it will be a further step towards commercialization of the product.
4. Result
The output signal is an audio signal which is dependent on ADC count, all the hand signs that are to be fetched depends on the counts. The hand signs taken in the prototype do not belong to a specific language, rather these are taken in a way such that user can modify it as per their requirement.Every bending of the sensor (finger) produces a unique ADC count so that when different hand sign is made different ADC count is produced. Processor uses these ADC counts to decide which audio signal should be fetched and played accordingly. With different hand signs different signals can be produced. Using this concept of ADC count, more and more no. of hand signs can be used as per user and accuracy can be increased with a little change in the ADC count. System accuracy, user configurability, portability, its immunity to noise and environmental disturbances make it to be a better choice over the other products available in the market.
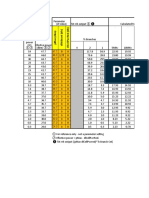
Fig 1 Hand signs used in the system Table II: Count and Selection Table A <560 >900 <600 <450 <560 U <560 <650 >850 <450 <560 O <560 <650 <600 >700 <560 P <560 <650 <600 <450 >800 Q >800 <650 <600 <450 <560 HWR <560 <650 >850 >700 <560 HELLO >800 <650 <600 <450 >800 LEFT RIGHT FORWARD
ADC1(2) ADC1(3) ADC1(4) ADC1(5) ADC1(6) ADC(1) ADC(2)
<350
>650 <350
5. CONCLUSION
In todays digitized world, processing speeds have increased dramatically, with computers being advanced to the levels where they can assist humans in complex tasks. Yet, input technologies seem to cause a major bottleneck in performing some of the tasks, under-utilizing the available resources and restricting the expressiveness of application use. Hand Gesture recognition comes to the rescue here The system is designed in such a way that it helps in communication between speech impaired & normal people with the help of flex sensors & accelerometer. We made a prototype in which we have stored 10 different signals of as per the users hand sign. Three of them are totally based on the output of the accelerometer and seven of them are based on the output of flex sensors. The accuracy of the system is efficient enough to produce different outputs with different hand signs of the user. With different bending, angle different ADC count & hence different hand signs can be
www.theijes.com
THE IJES
Page 24
Hand Sign Interpreter
made & could be stored accordingly. The created system is made in such a way that with small changes the system can become more & more versatile. To continue this momentum it is clear that further research in the areas of feature extraction, classification methods, and gesture representation are required to realize the ultimate goal of humans interfacing with machines on their own natural terms.
References
[1]. Recognition of sign language gestures using neural networks by Peter Vamplew. Department of Computer Science, University of Tasmania [2]. Fels and G Hinton (1993), Glove-Talk: A Neural Network Interface Between a Data-Glove and a Speech Synthesiser, IEEE Transactions on Neural Networks, 4, 1, pp. 2-8 [3]. Johnston (1989), Auslan: The Sign Language of the Australian Deaf Community, PhD thesis, Department of Linguistics, University of Sydney [4]. Kramer and L Leifer (1989), The Talking Glove: A Speaking Aid for Nonvocal Deaf and Deaf-Blind Individuals, RESNA 12th Annual Conference, New Orleans, Louisiana [5]. Finger Detection for Sign Language Recognition by Ravikiran J, Kavi Mahesh, Suhas Mahishi,Dheeraj R, Sudheender S, Nitin V Pujari
www.theijes.com
THE IJES
Page 25
Das könnte Ihnen auch gefallen
- Ijett V14P237 PDFDokument4 SeitenIjett V14P237 PDFRahul RajNoch keine Bewertungen
- Embedded Systems App Areas: Wearables, Healthcare, Sensing, RecognitionDokument8 SeitenEmbedded Systems App Areas: Wearables, Healthcare, Sensing, RecognitionSurr LaLaNoch keine Bewertungen
- Designing Activity Recognition Across PlatformsDokument22 SeitenDesigning Activity Recognition Across Platformsvipulkumar008Noch keine Bewertungen
- Ijecet: International Journal of Electronics and Communication Engineering & Technology (Ijecet)Dokument9 SeitenIjecet: International Journal of Electronics and Communication Engineering & Technology (Ijecet)IAEME PublicationNoch keine Bewertungen
- Survey Paper Based On Hand Gesture Hex Color Matrix Vector: Sukrit Mehra, Prashant Verma, Harshit Bung, Deepak BairageeDokument4 SeitenSurvey Paper Based On Hand Gesture Hex Color Matrix Vector: Sukrit Mehra, Prashant Verma, Harshit Bung, Deepak BairageeInternational Journal of computational Engineering research (IJCER)Noch keine Bewertungen
- 6 Ijmtst0905216Dokument5 Seiten6 Ijmtst0905216bhujwalakNoch keine Bewertungen
- Survey On Gesture Recognition For Sign LanguageDokument10 SeitenSurvey On Gesture Recognition For Sign LanguageIJRASETPublications0% (1)
- A Comprehensive Leap Motion Database For Hand Gesture RecognitionDokument6 SeitenA Comprehensive Leap Motion Database For Hand Gesture RecognitionMuhammad SulemanNoch keine Bewertungen
- G J E S R: Gesture and Voice Based Real Time Control SystemDokument3 SeitenG J E S R: Gesture and Voice Based Real Time Control SysteminzovarNoch keine Bewertungen
- DIY Hand Gesture Speaking SystemDokument21 SeitenDIY Hand Gesture Speaking SystemAbelly MoshyNoch keine Bewertungen
- Control robotic arm using data gloveDokument6 SeitenControl robotic arm using data gloveRajeswari MuruganNoch keine Bewertungen
- Real Time Human Activity Recognition On Smartphones Using LSTM NetworksDokument6 SeitenReal Time Human Activity Recognition On Smartphones Using LSTM NetworksAditi DoraNoch keine Bewertungen
- Gesture Volume Control Project SynopsisDokument5 SeitenGesture Volume Control Project SynopsisVashu MalikNoch keine Bewertungen
- T A D G G V V: HE Mazing Igital Loves That IVE Oice To The OicelessDokument10 SeitenT A D G G V V: HE Mazing Igital Loves That IVE Oice To The OicelesszeeshanNoch keine Bewertungen
- Accurate Activity Recognition in A Home SettingDokument9 SeitenAccurate Activity Recognition in A Home SettingmounamalarNoch keine Bewertungen
- Hand Gestures To Control Infotainment Equipment in CarsDokument6 SeitenHand Gestures To Control Infotainment Equipment in CarsnavNoch keine Bewertungen
- 48 A Albert Prasanna Kumar SimulationDokument6 Seiten48 A Albert Prasanna Kumar SimulationchfakhtNoch keine Bewertungen
- Sensors: A Semantic Autonomous Video Surveillance System For Dense Camera Networks in Smart CitiesDokument23 SeitenSensors: A Semantic Autonomous Video Surveillance System For Dense Camera Networks in Smart CitiesaliNoch keine Bewertungen
- A Virtual Keyboard Based On True-3D Optical RangingDokument10 SeitenA Virtual Keyboard Based On True-3D Optical Rangingbsingh_jimsNoch keine Bewertungen
- Assignment - 4 SUMMER-MAY - (2018) : Q4. List and Explain Various Interaction Devices Used in Developing An InterfaceDokument5 SeitenAssignment - 4 SUMMER-MAY - (2018) : Q4. List and Explain Various Interaction Devices Used in Developing An InterfaceAbhinav aroraNoch keine Bewertungen
- Ijcet: International Journal of Computer Engineering & Technology (Ijcet)Dokument10 SeitenIjcet: International Journal of Computer Engineering & Technology (Ijcet)IAEME PublicationNoch keine Bewertungen
- Fingerprint Recognition-Based Access Controlling System For AutomobilesDokument4 SeitenFingerprint Recognition-Based Access Controlling System For AutomobilesLakshminarayanan SriNoch keine Bewertungen
- Motion Detector THDCDokument26 SeitenMotion Detector THDCVasu ThakurNoch keine Bewertungen
- Gesture Controlled VocalizerDokument5 SeitenGesture Controlled VocalizerFirstLearnNoch keine Bewertungen
- Hand Gestures For Remote Control: KeywordsDokument3 SeitenHand Gestures For Remote Control: KeywordsSitaram ChikkalaNoch keine Bewertungen
- Real-Time Human Activity Recognition From Smart Phone Using Linear Support Vector MachinesDokument10 SeitenReal-Time Human Activity Recognition From Smart Phone Using Linear Support Vector MachinesTELKOMNIKANoch keine Bewertungen
- Cabreraetal. 2012 Glove BasedGestureRecognitionSystemDokument8 SeitenCabreraetal. 2012 Glove BasedGestureRecognitionSystemJaseel CNoch keine Bewertungen
- 1.what Is Signal ProcessingDokument2 Seiten1.what Is Signal Processingநந்த_குமார்Noch keine Bewertungen
- Gesture-Controlled Questionnaires on WatchesDokument10 SeitenGesture-Controlled Questionnaires on WatchesAjita LahaNoch keine Bewertungen
- Wireless Mouse Using Tri Axis MEMS Ijariie1386 Volume 1 15 Page 33 40Dokument8 SeitenWireless Mouse Using Tri Axis MEMS Ijariie1386 Volume 1 15 Page 33 40Anup M UpadhyayaNoch keine Bewertungen
- Multimodal Interaction With A Wearable Augmented Reality SystemDokument10 SeitenMultimodal Interaction With A Wearable Augmented Reality SystemJose Pardo Vera-TudelaNoch keine Bewertungen
- Traffic Prediction Techniques A Review 24SABRENA MESH GARGDokument8 SeitenTraffic Prediction Techniques A Review 24SABRENA MESH GARGSneha GDNoch keine Bewertungen
- Ijcse V1i2p2 PDFDokument9 SeitenIjcse V1i2p2 PDFISAR-PublicationsNoch keine Bewertungen
- From Physical To Virtual Wireless Sensor Networks Using Cloud ComputingDokument7 SeitenFrom Physical To Virtual Wireless Sensor Networks Using Cloud ComputingWhite Globe Publications (IJORCS)Noch keine Bewertungen
- By T.Karthik IT (3 / 4), Narsaraopeta Engineering College, Narsaraopeta, Guntur DistDokument8 SeitenBy T.Karthik IT (3 / 4), Narsaraopeta Engineering College, Narsaraopeta, Guntur DistmycatalystsNoch keine Bewertungen
- Mobile Tracking Based On Phone Theft Detection: IjarcceDokument6 SeitenMobile Tracking Based On Phone Theft Detection: Ijarccejo manNoch keine Bewertungen
- Tesor Iero 2009Dokument6 SeitenTesor Iero 2009ifyNoch keine Bewertungen
- 29 FingerprintDokument11 Seiten29 FingerprintMoses OrakanyeNoch keine Bewertungen
- A Novel Approach For HCI Using MEMS Based DeviceDokument3 SeitenA Novel Approach For HCI Using MEMS Based DeviceiirNoch keine Bewertungen
- IoT Unit-4 According To RGPVDokument10 SeitenIoT Unit-4 According To RGPVMadhav PanditNoch keine Bewertungen
- Modeling and Designing of Gesture Control Robot: October 2017Dokument7 SeitenModeling and Designing of Gesture Control Robot: October 2017Raka SinhaNoch keine Bewertungen
- Gesture and speech recognition for industrial robot programmingDokument21 SeitenGesture and speech recognition for industrial robot programmingIvan TrubeljaNoch keine Bewertungen
- Smart sensors enabling the Intelligent IoTDokument13 SeitenSmart sensors enabling the Intelligent IoTRonald SmithNoch keine Bewertungen
- Ai SpeechDokument17 SeitenAi SpeechJishnu RajendranNoch keine Bewertungen
- Ultrasonic Navigation For Blind With Audio Interface DocumentationDokument55 SeitenUltrasonic Navigation For Blind With Audio Interface DocumentationGoutham Raj Mode60% (5)
- Carleton U Inglis Technology ReportDokument10 SeitenCarleton U Inglis Technology ReportMarcelo RufinoNoch keine Bewertungen
- Emerging Technologies: IoT, Augmented Reality, Virtual RealityDokument9 SeitenEmerging Technologies: IoT, Augmented Reality, Virtual RealityRanjani SundarNoch keine Bewertungen
- Finger Tracking in Real Time Human Computer InteractionDokument3 SeitenFinger Tracking in Real Time Human Computer InteractionJishnu RemeshNoch keine Bewertungen
- Deep Learning-Based Approach For Sign Language Gesture Recognition With Efficient Hand Gesture RepresentationDokument16 SeitenDeep Learning-Based Approach For Sign Language Gesture Recognition With Efficient Hand Gesture RepresentationAakash KonijetiNoch keine Bewertungen
- Density Based Traffic Control With Alert System Using Arduino and NodeMCUDokument3 SeitenDensity Based Traffic Control With Alert System Using Arduino and NodeMCUWARSE JournalsNoch keine Bewertungen
- Ijcet: International Journal of Computer Engineering & Technology (Ijcet)Dokument7 SeitenIjcet: International Journal of Computer Engineering & Technology (Ijcet)IAEME PublicationNoch keine Bewertungen
- Machine Learning Approach For Assisting Visually ImpairedDokument4 SeitenMachine Learning Approach For Assisting Visually ImpairedijtetjournalNoch keine Bewertungen
- Literature ReviewDokument6 SeitenLiterature Reviewlalith vamsiNoch keine Bewertungen
- Artificial Intelligence For Speech RecognitionDokument9 SeitenArtificial Intelligence For Speech RecognitionNeha BhoyarNoch keine Bewertungen
- Chapter 1Dokument23 SeitenChapter 169 - Nguyễn Bá VũNoch keine Bewertungen
- Unit 4 - Internet of Things - WWW - Rgpvnotes.in PDFDokument12 SeitenUnit 4 - Internet of Things - WWW - Rgpvnotes.in PDFVinutha MNoch keine Bewertungen
- 2.literature Review: 2.1 Bare Hand Computer InteractionDokument19 Seiten2.literature Review: 2.1 Bare Hand Computer Interactionapi-26488089Noch keine Bewertungen
- Face Detection and Recognition on Mobile DevicesVon EverandFace Detection and Recognition on Mobile DevicesBewertung: 1 von 5 Sternen1/5 (1)
- Literacy Level in Andhra Pradesh and Telangana States - A Statistical StudyDokument8 SeitenLiteracy Level in Andhra Pradesh and Telangana States - A Statistical StudytheijesNoch keine Bewertungen
- The Effect of Firm Size and Diversification On Capital Structure and FirmValue (Study in Manufacturing Sector in Indonesia Stock Exchange)Dokument12 SeitenThe Effect of Firm Size and Diversification On Capital Structure and FirmValue (Study in Manufacturing Sector in Indonesia Stock Exchange)theijesNoch keine Bewertungen
- A Statistical Study On Age Data in Census Andhra Pradesh and TelanganaDokument8 SeitenA Statistical Study On Age Data in Census Andhra Pradesh and TelanganatheijesNoch keine Bewertungen
- Means of Escape Assessment Procedure For Hospital's Building in Malaysia.Dokument5 SeitenMeans of Escape Assessment Procedure For Hospital's Building in Malaysia.theijesNoch keine Bewertungen
- Improving Material Removal Rate and Optimizing Variousmachining Parameters in EDMDokument5 SeitenImproving Material Removal Rate and Optimizing Variousmachining Parameters in EDMtheijesNoch keine Bewertungen
- Industrial Installation Skills Acquired and Job Performance of Graduates of Electrical Installation and Maintenance Works Trade of Technical Colleges in North Eastern NigeriaDokument8 SeitenIndustrial Installation Skills Acquired and Job Performance of Graduates of Electrical Installation and Maintenance Works Trade of Technical Colleges in North Eastern NigeriatheijesNoch keine Bewertungen
- Impact of Sewage Discharge On Coral ReefsDokument5 SeitenImpact of Sewage Discharge On Coral ReefstheijesNoch keine Bewertungen
- Defluoridation of Ground Water Using Corn Cobs PowderDokument4 SeitenDefluoridation of Ground Water Using Corn Cobs PowdertheijesNoch keine Bewertungen
- Gating and Residential Segregation. A Case of IndonesiaDokument7 SeitenGating and Residential Segregation. A Case of IndonesiatheijesNoch keine Bewertungen
- Big Data Analytics in Higher Education: A ReviewDokument8 SeitenBig Data Analytics in Higher Education: A ReviewtheijesNoch keine Bewertungen
- Studio of District Upgrading Project in Amman - Jordan Case Study - East District WahdatDokument5 SeitenStudio of District Upgrading Project in Amman - Jordan Case Study - East District WahdattheijesNoch keine Bewertungen
- Experimental Study On Gypsum As Binding Material and Its PropertiesDokument15 SeitenExperimental Study On Gypsum As Binding Material and Its PropertiestheijesNoch keine Bewertungen
- Analytical Description of Dc Motor with Determination of Rotor Damping Constant (Β) Of 12v Dc MotorDokument6 SeitenAnalytical Description of Dc Motor with Determination of Rotor Damping Constant (Β) Of 12v Dc MotortheijesNoch keine Bewertungen
- Multimedia Databases: Performance Measure Benchmarking Model (PMBM) FrameworkDokument10 SeitenMultimedia Databases: Performance Measure Benchmarking Model (PMBM) FrameworktheijesNoch keine Bewertungen
- Data Clustering Using Autoregressive Integrated Moving Average (ARIMA) Model For Islamic Country Currency: An Econometrics Method For Islamic Financial EngineeringDokument10 SeitenData Clustering Using Autoregressive Integrated Moving Average (ARIMA) Model For Islamic Country Currency: An Econometrics Method For Islamic Financial EngineeringtheijesNoch keine Bewertungen
- Performance Evaluation of Calcined Termite Mound (CTM) Concrete With Sikament NN As Superplasticizer and Water Reducing AgentDokument9 SeitenPerformance Evaluation of Calcined Termite Mound (CTM) Concrete With Sikament NN As Superplasticizer and Water Reducing AgenttheijesNoch keine Bewertungen
- The Effect of Organizational Culture On Organizational Performance: Mediating Role of Knowledge Management and Strategic PlanningDokument8 SeitenThe Effect of Organizational Culture On Organizational Performance: Mediating Role of Knowledge Management and Strategic PlanningtheijesNoch keine Bewertungen
- A Study For Applications of Histogram in Image EnhancementDokument5 SeitenA Study For Applications of Histogram in Image EnhancementtheijesNoch keine Bewertungen
- A Lightweight Message Authentication Framework in The Intelligent Vehicles SystemDokument7 SeitenA Lightweight Message Authentication Framework in The Intelligent Vehicles SystemtheijesNoch keine Bewertungen
- Mixed Model Analysis For OverdispersionDokument9 SeitenMixed Model Analysis For OverdispersiontheijesNoch keine Bewertungen
- Design and Simulation of A Compact All-Optical Differentiator Based On Silicon Microring ResonatorDokument5 SeitenDesign and Simulation of A Compact All-Optical Differentiator Based On Silicon Microring ResonatortheijesNoch keine Bewertungen
- Development of The Water Potential in River Estuary (Loloan) Based On Society For The Water Conservation in Saba Coastal Village, Gianyar RegencyDokument9 SeitenDevelopment of The Water Potential in River Estuary (Loloan) Based On Society For The Water Conservation in Saba Coastal Village, Gianyar RegencytheijesNoch keine Bewertungen
- Marginal Regression For A Bi-Variate Response With Diabetes Mellitus StudyDokument7 SeitenMarginal Regression For A Bi-Variate Response With Diabetes Mellitus StudytheijesNoch keine Bewertungen
- Short Review of The Unitary Quantum TheoryDokument31 SeitenShort Review of The Unitary Quantum TheorytheijesNoch keine Bewertungen
- Energy Conscious Design Elements in Office Buildings in HotDry Climatic Region of NigeriaDokument6 SeitenEnergy Conscious Design Elements in Office Buildings in HotDry Climatic Region of NigeriatheijesNoch keine Bewertungen
- Status of Phytoplankton Community of Kisumu Bay, Winam Gulf, Lake Victoria, KenyaDokument7 SeitenStatus of Phytoplankton Community of Kisumu Bay, Winam Gulf, Lake Victoria, KenyatheijesNoch keine Bewertungen
- The Effect of Varying Span On Design of Medium Span Reinforced Concrete T-Beam Bridge DeckDokument4 SeitenThe Effect of Varying Span On Design of Medium Span Reinforced Concrete T-Beam Bridge DecktheijesNoch keine Bewertungen
- Fisher Theory and Stock Returns: An Empirical Investigation For Industry Stocks On Vietnamese Stock MarketDokument7 SeitenFisher Theory and Stock Returns: An Empirical Investigation For Industry Stocks On Vietnamese Stock MarkettheijesNoch keine Bewertungen
- Integrated Approach To Wetland Protection: A Sure Means For Sustainable Water Supply To Local Communities of Nyando Basin, KenyaDokument6 SeitenIntegrated Approach To Wetland Protection: A Sure Means For Sustainable Water Supply To Local Communities of Nyando Basin, KenyatheijesNoch keine Bewertungen
- Evaluation of Tax Inspection On Annual Information Income Taxes Corporation Taxpayer (Study at Tax Office Pratama Kendari)Dokument5 SeitenEvaluation of Tax Inspection On Annual Information Income Taxes Corporation Taxpayer (Study at Tax Office Pratama Kendari)theijesNoch keine Bewertungen
- Stages On The Empirical Program of RelativismDokument9 SeitenStages On The Empirical Program of RelativismJorge Castillo-SepúlvedaNoch keine Bewertungen
- Khurda 2Dokument6 SeitenKhurda 2papiraniNoch keine Bewertungen
- Tanbin Chowdhury ResumeDokument2 SeitenTanbin Chowdhury ResumeTanbin RafeeNoch keine Bewertungen
- Curso de GaitaDokument24 SeitenCurso de GaitaCarlosluz52Noch keine Bewertungen
- DGS PBDokument103 SeitenDGS PBibraheemNoch keine Bewertungen
- Rail Section As Per IrsDokument6 SeitenRail Section As Per IrskarnagaNoch keine Bewertungen
- Research On Water Distribution NetworkDokument9 SeitenResearch On Water Distribution NetworkVikas PathakNoch keine Bewertungen
- Parameter ranges and attenuation values for RRH configurationsDokument121 SeitenParameter ranges and attenuation values for RRH configurationscharantejaNoch keine Bewertungen
- Sally Su-Ac96e320a429130Dokument5 SeitenSally Su-Ac96e320a429130marlys justiceNoch keine Bewertungen
- Math 20053 Calculus 2: Unit Test 1Dokument2 SeitenMath 20053 Calculus 2: Unit Test 1mark rafolsNoch keine Bewertungen
- India MedTech 23 CompendiumDokument326 SeitenIndia MedTech 23 Compendiumudiptya_papai2007Noch keine Bewertungen
- Training Manual W Appendix 3-20-14 RsDokument193 SeitenTraining Manual W Appendix 3-20-14 RsZakir Ullah100% (5)
- Pe Unit2Dokument2 SeitenPe Unit2srikaanth06Noch keine Bewertungen
- Vacuum Pump Manual (English)Dokument12 SeitenVacuum Pump Manual (English)nguyen lam An100% (1)
- FET ExperimentDokument4 SeitenFET ExperimentHayan FadhilNoch keine Bewertungen
- Wi-Fi Planning and Design Questionnaire 2.0Dokument12 SeitenWi-Fi Planning and Design Questionnaire 2.0Free Space67% (3)
- Osmaan Shamsiddeen: Work History Personal InfoDokument1 SeiteOsmaan Shamsiddeen: Work History Personal InfoOsmaan ShamsiddeenNoch keine Bewertungen
- MNL036Dokument22 SeitenMNL036husni1031Noch keine Bewertungen
- Fiitjee Two Year Crp-2013-2015 Reshuffling Test - II Marks Test Date 30.03.2014Dokument35 SeitenFiitjee Two Year Crp-2013-2015 Reshuffling Test - II Marks Test Date 30.03.2014Prateek__ManochaNoch keine Bewertungen
- Using Accelerometers in A Data Acquisition SystemDokument10 SeitenUsing Accelerometers in A Data Acquisition SystemueidaqNoch keine Bewertungen
- JAG Energy Case StudyDokument52 SeitenJAG Energy Case StudyRei JelNoch keine Bewertungen
- JavaScript ArraysDokument5 SeitenJavaScript Arraysursu_padure_scrNoch keine Bewertungen
- Peterbilt Essentials Module3 Sleepers PDFDokument6 SeitenPeterbilt Essentials Module3 Sleepers PDFLuis Reinaldo Ramirez ContrerasNoch keine Bewertungen
- Write EssayDokument141 SeitenWrite Essayamsyous100% (1)
- Met Worksheet Atmosphere QuestionsDokument4 SeitenMet Worksheet Atmosphere QuestionsSujan IyerNoch keine Bewertungen
- Mobile NetDokument9 SeitenMobile NetArdian UmamNoch keine Bewertungen
- The Heart of Arabia - A Record of Travel & ExplorationDokument503 SeitenThe Heart of Arabia - A Record of Travel & ExplorationAltug100% (1)
- Guidelines For Selecting Correct Hot Forging Die LubricantsDokument4 SeitenGuidelines For Selecting Correct Hot Forging Die LubricantsSrikar Shenoy100% (1)
- Nipas Act, Ipra, LGC - Atty. Mayo-AndaDokument131 SeitenNipas Act, Ipra, LGC - Atty. Mayo-AndaKing Bangngay100% (1)
- Fire Resistance Ratings - ANSI/UL 263: Design No. U309Dokument4 SeitenFire Resistance Ratings - ANSI/UL 263: Design No. U309DavidNoch keine Bewertungen