Das könnte Ihnen auch gefallen
- Industrial X-Ray Computed TomographyVon EverandIndustrial X-Ray Computed TomographySimone CarmignatoNoch keine Bewertungen
- Software Radio: Sampling Rate Selection, Design and SynchronizationVon EverandSoftware Radio: Sampling Rate Selection, Design and SynchronizationNoch keine Bewertungen
- Computational and Experimental Studies On Aircraft Structural Health Monitoring SystemsDokument10 SeitenComputational and Experimental Studies On Aircraft Structural Health Monitoring Systemsmahesh MNoch keine Bewertungen
- 48bb PDFDokument11 Seiten48bb PDFSãröj ShâhNoch keine Bewertungen
- Project Review On Ultrasonic Distance Measurement: Prakhar Shrivastava, Praveen Kumar, Ankit TiwariDokument3 SeitenProject Review On Ultrasonic Distance Measurement: Prakhar Shrivastava, Praveen Kumar, Ankit TiwarirajatpreetNoch keine Bewertungen
- Using Coded Signals To Benefit From Ultrasonic Sensor Crosstalk in Mobile Robot Obstacle AvoidanceDokument6 SeitenUsing Coded Signals To Benefit From Ultrasonic Sensor Crosstalk in Mobile Robot Obstacle AvoidancesudharsanankNoch keine Bewertungen
- SLAMBOT: Structural Health Monitoring Robot Using Lamb WavesDokument19 SeitenSLAMBOT: Structural Health Monitoring Robot Using Lamb WavesJose De GouveiaNoch keine Bewertungen
- Spread Spectrum Ultrasonic Positioning SystemDokument6 SeitenSpread Spectrum Ultrasonic Positioning SystemTuấn DũngNoch keine Bewertungen
- Design and Development of Microcontroller Based Ultrasonic Flaw DetectorDokument7 SeitenDesign and Development of Microcontroller Based Ultrasonic Flaw DetectorBagusElokNoch keine Bewertungen
- Mechatronics Notes22Dokument23 SeitenMechatronics Notes22Arun KumarNoch keine Bewertungen
- A Novel Technique For Advanced Ultrasonic Testing of Concrete by Using Signal Conditioning Methods and A Scanning Laser VibrometerDokument5 SeitenA Novel Technique For Advanced Ultrasonic Testing of Concrete by Using Signal Conditioning Methods and A Scanning Laser VibrometersrgokuNoch keine Bewertungen
- Finite Element Numerical Simulation Analysis BasedDokument8 SeitenFinite Element Numerical Simulation Analysis BasedBenjoy JohnNoch keine Bewertungen
- Design of Linear Array Transducer Using Ultrasound Simulation Program Field-IIDokument7 SeitenDesign of Linear Array Transducer Using Ultrasound Simulation Program Field-IIinventyNoch keine Bewertungen
- Journal Paper FormatDokument6 SeitenJournal Paper FormatPeter Nai HoNoch keine Bewertungen
- Implementation and Analysis of Respiration-Rate Estimation Using Impulse-Based UwbDokument7 SeitenImplementation and Analysis of Respiration-Rate Estimation Using Impulse-Based UwbVikas MehraNoch keine Bewertungen
- Capstone Project 2 FinalDokument35 SeitenCapstone Project 2 FinalAmarjeet SinghNoch keine Bewertungen
- Collimated Beam FMCW Radar For Vital Sign Patient MonitoringDokument8 SeitenCollimated Beam FMCW Radar For Vital Sign Patient Monitoringsoham lakhoteNoch keine Bewertungen
- Digital Signal Processing System of Ultrasonic SigDokument7 SeitenDigital Signal Processing System of Ultrasonic Sigkeltoma.boutaNoch keine Bewertungen
- An Overview of Microwave Sensor TechnologyDokument8 SeitenAn Overview of Microwave Sensor Technology박철승Noch keine Bewertungen
- IRJET V4I1178 With Cover Page v2Dokument6 SeitenIRJET V4I1178 With Cover Page v2Chris Louie YalungNoch keine Bewertungen
- Paper Velocimeter SPIE RS07Dokument12 SeitenPaper Velocimeter SPIE RS07Mounika ReddyNoch keine Bewertungen
- Subsection-Average Cyclostationary Feature Detction in Cognitive RadioDokument5 SeitenSubsection-Average Cyclostationary Feature Detction in Cognitive RadioBedadipta BainNoch keine Bewertungen
- Sensorcomm 2011 12 40 10257 PDFDokument5 SeitenSensorcomm 2011 12 40 10257 PDFBee MUNoch keine Bewertungen
- Uu 30 2009Dokument5 SeitenUu 30 2009Eka Panji SaptaprasetyaNoch keine Bewertungen
- Vol2no11 8Dokument4 SeitenVol2no11 8managing_editor_cisNoch keine Bewertungen
- A Class of Spectrum-Sensing Schemes For Cognitive Radio Under Impulsive Noise Circumstances: Structure and Performance in Nonfading and Fading EnvironmentsDokument18 SeitenA Class of Spectrum-Sensing Schemes For Cognitive Radio Under Impulsive Noise Circumstances: Structure and Performance in Nonfading and Fading EnvironmentsBedadipta BainNoch keine Bewertungen
- Sensors: Toward Smart Aerospace Structures: Design of A Piezoelectric Sensor and Its Analog Interface For Flaw DetectionDokument19 SeitenSensors: Toward Smart Aerospace Structures: Design of A Piezoelectric Sensor and Its Analog Interface For Flaw DetectionValdir JuniorNoch keine Bewertungen
- Ijesrt: Landslide Monitoring System Based On Dual Receiver MeasurementsDokument4 SeitenIjesrt: Landslide Monitoring System Based On Dual Receiver MeasurementsRup JoshiNoch keine Bewertungen
- Sensors: A Sparse Reconstruction Algorithm For Ultrasonic Images in Nondestructive TestingDokument20 SeitenSensors: A Sparse Reconstruction Algorithm For Ultrasonic Images in Nondestructive TestingBoulHich BoulHichNoch keine Bewertungen
- Experimental Investigation of Factors Affecting Stability of Interferometric Measurements With Ground Based Noise Waveform SARDokument5 SeitenExperimental Investigation of Factors Affecting Stability of Interferometric Measurements With Ground Based Noise Waveform SARkudriashovvladimirNoch keine Bewertungen
- SDR BasedSystemforSatelliteRangingMeasurements DraftDokument11 SeitenSDR BasedSystemforSatelliteRangingMeasurements Draftmisaeljonatasandrade27Noch keine Bewertungen
- Prototype of Microwave Imaging System For Breast-Cancer ScreeningDokument5 SeitenPrototype of Microwave Imaging System For Breast-Cancer ScreeningNouralhuda A HasanNoch keine Bewertungen
- Application of Ultrasonic Sensor For Measuring DisDokument10 SeitenApplication of Ultrasonic Sensor For Measuring Discristian123100% (1)
- Development Land Application Mass Sensors Based On Flexural Resonances in Alumina BeamsDokument8 SeitenDevelopment Land Application Mass Sensors Based On Flexural Resonances in Alumina BeamspandyyanNoch keine Bewertungen
- Small Scale Imaging Using Ultrasonic TomographyDokument16 SeitenSmall Scale Imaging Using Ultrasonic TomographyHilda SyafiraNoch keine Bewertungen
- ISo VibrationDokument4 SeitenISo VibrationrahulkumbharkarNoch keine Bewertungen
- Modeling of Vibration Sensing With Variable Fabry-Perot SystemDokument6 SeitenModeling of Vibration Sensing With Variable Fabry-Perot SystemfadhaliNoch keine Bewertungen
- White Paper Phased Array Technology OlympusDokument28 SeitenWhite Paper Phased Array Technology Olympusborja garcia sastreNoch keine Bewertungen
- Jai Guided WaveDokument8 SeitenJai Guided Waveimryuk19Noch keine Bewertungen
- How To Read MSS Report and Report ExamplesDokument18 SeitenHow To Read MSS Report and Report ExamplesEDER TORRADONoch keine Bewertungen
- Application of Tandem Techniques With Contact Mono-Elements or Phased Array Probes: Simulation and ExperimentsDokument10 SeitenApplication of Tandem Techniques With Contact Mono-Elements or Phased Array Probes: Simulation and ExperimentsAbd Rahman AliasNoch keine Bewertungen
- Hydroacoustics and Underwater Acoustics: SessionsDokument53 SeitenHydroacoustics and Underwater Acoustics: Sessionsle_luan_166Noch keine Bewertungen
- An Ultrasonic/Optical Pulse Sensor For Precise Distance MeasurementsDokument4 SeitenAn Ultrasonic/Optical Pulse Sensor For Precise Distance MeasurementsPonpon KujapyNoch keine Bewertungen
- Sakai Chapter 3Dokument20 SeitenSakai Chapter 3Ronnel Mendoza VasquezNoch keine Bewertungen
- Haptic Feedback: Rationale and Source of Our Project IdeaDokument25 SeitenHaptic Feedback: Rationale and Source of Our Project IdeasrujanNoch keine Bewertungen
- Aai Training ReportDokument20 SeitenAai Training ReportAditya SrivastavaNoch keine Bewertungen
- The Acoustic Vector Sensor A Versatile BattlefieldDokument9 SeitenThe Acoustic Vector Sensor A Versatile BattlefieldGiorgi RcheulishviliNoch keine Bewertungen
- d22 Tkbhaumik VeccDokument2 Seitend22 Tkbhaumik VeccpratikNoch keine Bewertungen
- PHY02Dokument7 SeitenPHY02ben harrisNoch keine Bewertungen
- Position Determination of An Aircraft Us PDFDokument7 SeitenPosition Determination of An Aircraft Us PDFMartin OnettoNoch keine Bewertungen
- Wideband Multiprobe Microwave Multimeter: Vladimir M. Volkov, B. ZaichenkoDokument3 SeitenWideband Multiprobe Microwave Multimeter: Vladimir M. Volkov, B. ZaichenkoArif HurairahNoch keine Bewertungen
- Eigenvalue Based SsDokument12 SeitenEigenvalue Based SsZeynep AtlasNoch keine Bewertungen
- Ieee GSMDokument6 SeitenIeee GSMInes FekiNoch keine Bewertungen
- Introducción A La Tecnología de Ultrasonidos Phased ArrayDokument7 SeitenIntroducción A La Tecnología de Ultrasonidos Phased ArrayClemente Rafael Marval EscalonaNoch keine Bewertungen
- A Microprocessor Based Clutter Canceller For Life Locator SystemDokument6 SeitenA Microprocessor Based Clutter Canceller For Life Locator SystemPln DivyaNoch keine Bewertungen
- Railway Security Through The Use of Wireless Sensor Networks Based On Fuzzy LogicDokument11 SeitenRailway Security Through The Use of Wireless Sensor Networks Based On Fuzzy LogicMehanathan Maggie MikeyNoch keine Bewertungen
- MP MSG Set 183 14Dokument6 SeitenMP MSG Set 183 14parashar88Noch keine Bewertungen
- Introduction To Synthetic Aperture Sonar PDFDokument27 SeitenIntroduction To Synthetic Aperture Sonar PDFnaivedya_mishraNoch keine Bewertungen
- Introduction To Synthetic Aperture Sonar: Roy Edgar HansenDokument27 SeitenIntroduction To Synthetic Aperture Sonar: Roy Edgar HansenKarelkatNoch keine Bewertungen
- Handbook of Ultra-Wideband Short-Range Sensing: Theory, Sensors, ApplicationsVon EverandHandbook of Ultra-Wideband Short-Range Sensing: Theory, Sensors, ApplicationsNoch keine Bewertungen
- B767 Ata 70 80Dokument205 SeitenB767 Ata 70 80ccoyure100% (2)
- Ata 73 CF6-80C2Dokument38 SeitenAta 73 CF6-80C2ccoyure100% (1)
- Ata 78 CF6-80C2Dokument29 SeitenAta 78 CF6-80C2ccoyure100% (1)
- Human FactorsDokument126 SeitenHuman Factorsccoyure100% (1)
- Ata 80 CF6-80C2Dokument8 SeitenAta 80 CF6-80C2ccoyure100% (1)
- Ata 71 CF6-80C2Dokument28 SeitenAta 71 CF6-80C2ccoyure100% (1)
- Ata 75 CF6-80C2Dokument14 SeitenAta 75 CF6-80C2ccoyure100% (2)
- FM 1-506 PDFDokument142 SeitenFM 1-506 PDFMariana TatarchukNoch keine Bewertungen
- Ata 79 CF6-80C2Dokument19 SeitenAta 79 CF6-80C2ccoyure100% (1)
- Ata 72 CF6-80C2Dokument19 SeitenAta 72 CF6-80C2ccoyure100% (4)
- Ata 74 CF6-80C2Dokument9 SeitenAta 74 CF6-80C2ccoyure100% (1)
- Ata 76 CF6-80C2Dokument7 SeitenAta 76 CF6-80C2ccoyure100% (2)
- CfiDokument16 SeitenCficcoyureNoch keine Bewertungen
- GE Performance Monitoring PDFDokument11 SeitenGE Performance Monitoring PDFant29539432Noch keine Bewertungen
- Engine 4 StrokeDokument16 SeitenEngine 4 Strokeelsoukkary100% (2)
- Axial Load Distribution in A Jet Engine Spline Coupling: Justin McgrathDokument14 SeitenAxial Load Distribution in A Jet Engine Spline Coupling: Justin McgrathccoyureNoch keine Bewertungen
- ATPL OXFORD EnginesDokument472 SeitenATPL OXFORD Enginesccoyure93% (15)
- Lec-06 TurbomachineryDokument19 SeitenLec-06 TurbomachineryccoyureNoch keine Bewertungen
- Vol Ii-4Dokument60 SeitenVol Ii-4ccoyureNoch keine Bewertungen
- Turbomachinery AerodynamicsDokument21 SeitenTurbomachinery AerodynamicsbunnykfaNoch keine Bewertungen
- Propeller Control Unit (PCU) Operation: Constant Speeding Variable Pitch Propeller SystemDokument21 SeitenPropeller Control Unit (PCU) Operation: Constant Speeding Variable Pitch Propeller SystemccoyureNoch keine Bewertungen
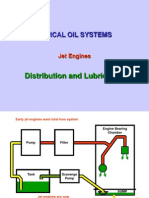
- Typical Oil Systems: Distribution and LubricationDokument8 SeitenTypical Oil Systems: Distribution and LubricationccoyureNoch keine Bewertungen
- Aircraft Dynamic ModesDokument5 SeitenAircraft Dynamic ModesccoyureNoch keine Bewertungen
- TD 012019 enDokument24 SeitenTD 012019 enMikami TeruNoch keine Bewertungen
- WILLSEMI Will Semicon ESD5311N 2 TR - C153721 PDFDokument5 SeitenWILLSEMI Will Semicon ESD5311N 2 TR - C153721 PDFPippoNoch keine Bewertungen
- Sabouni AdaptivecoverageforfutureltenetworksDokument158 SeitenSabouni AdaptivecoverageforfutureltenetworksWided AhmadiNoch keine Bewertungen
- GE FanucDokument21 SeitenGE FanucABVSAINoch keine Bewertungen
- BITMAIN ANTMINER S7 Batch 15 With 4.73th/sDokument6 SeitenBITMAIN ANTMINER S7 Batch 15 With 4.73th/scjtrybiecNoch keine Bewertungen
- Isc 2SC6090: Isc Silicon NPN Power TransistorDokument2 SeitenIsc 2SC6090: Isc Silicon NPN Power TransistorCipto EdiNoch keine Bewertungen
- Toshiba Satellite L200 M200 M203 M206 KBTIDokument59 SeitenToshiba Satellite L200 M200 M203 M206 KBTIYakub LismaNoch keine Bewertungen
- Wharfedale SubwooferDokument10 SeitenWharfedale SubwooferweerawatplcNoch keine Bewertungen
- UL General-Use Circuit Ampacity Reference ChartDokument2 SeitenUL General-Use Circuit Ampacity Reference ChartDaniel KretsuNoch keine Bewertungen
- CA I - Chapter 2 ISA 2 RISC VDokument66 SeitenCA I - Chapter 2 ISA 2 RISC VDuc ToanNoch keine Bewertungen
- Service Manual: LCD TVDokument73 SeitenService Manual: LCD TVJose Luis Medina CastañedaNoch keine Bewertungen
- RTN 905 V100: IDU Quick Installation Guide (Indoor)Dokument42 SeitenRTN 905 V100: IDU Quick Installation Guide (Indoor)Yuriy KulakovskiyNoch keine Bewertungen
- ABB Price Book 713Dokument1 SeiteABB Price Book 713EliasNoch keine Bewertungen
- Universiti Teknologi Mara Final Examination: Confidential AS/OCT 2010/PHY150Dokument11 SeitenUniversiti Teknologi Mara Final Examination: Confidential AS/OCT 2010/PHY150Immoral FlowerNoch keine Bewertungen
- Ustares Research 2Dokument15 SeitenUstares Research 2Zachary Yassir GonzalezNoch keine Bewertungen
- Toshiba T2110 T2110CS T2115CS T2130 T2130CS T2130CT T2135 - Maintenance ManualDokument183 SeitenToshiba T2110 T2110CS T2115CS T2130 T2130CS T2130CT T2135 - Maintenance ManualAngel Chans SabrojoNoch keine Bewertungen
- Q4100 Igniter Installation ManualDokument8 SeitenQ4100 Igniter Installation ManualDejan StevanovicNoch keine Bewertungen
- DSE M643 Data SheetDokument7 SeitenDSE M643 Data SheetY.EbadiNoch keine Bewertungen
- BR917058EN CYME72 NewFeaturesDokument4 SeitenBR917058EN CYME72 NewFeaturesMiguel CbNoch keine Bewertungen
- Isie - An Electric Fence Energizer Design Method PDFDokument6 SeitenIsie - An Electric Fence Energizer Design Method PDFSamuel MushakaNoch keine Bewertungen
- Data Safe Front Terminal HX-FTDokument6 SeitenData Safe Front Terminal HX-FTEfmamj Jasond Suarez VelezNoch keine Bewertungen
- Acc-En (Sci) : Analogue Multi-Sensor With SCIDokument1 SeiteAcc-En (Sci) : Analogue Multi-Sensor With SCIuygar öztürkNoch keine Bewertungen
- NVIS 2040-80 20antennaDokument7 SeitenNVIS 2040-80 20antennaChris VinceNoch keine Bewertungen
- Radar Detection Using Ultrasonic Sensor: June 2020Dokument6 SeitenRadar Detection Using Ultrasonic Sensor: June 2020yuqqi qiNoch keine Bewertungen
- Buchholz Relay HistoryDokument7 SeitenBuchholz Relay Historyjulio cesar silvaNoch keine Bewertungen
- Fitch - The-Superheterodyne-BookDokument70 SeitenFitch - The-Superheterodyne-BookmplennaNoch keine Bewertungen
- Power Quality: Case StudyDokument6 SeitenPower Quality: Case StudymarinflorentinaoanaNoch keine Bewertungen
- Unbalanced Three-Phase Distribution SystemDokument5 SeitenUnbalanced Three-Phase Distribution SystemIraj Az IraniNoch keine Bewertungen
- MP3000 Controller Alarm and Warnings OverviewDokument4 SeitenMP3000 Controller Alarm and Warnings OverviewGomesNoch keine Bewertungen
- Q. 5 in The Following Circuit The Resultant Capacitance Between A and B Is I F. Find The Value of C (Ans F)Dokument12 SeitenQ. 5 in The Following Circuit The Resultant Capacitance Between A and B Is I F. Find The Value of C (Ans F)dilip kumarNoch keine Bewertungen