Das könnte Ihnen auch gefallen
- Marine Rudders, Hydrofoils and Control Surfaces: Principles, Data, Design and ApplicationsVon EverandMarine Rudders, Hydrofoils and Control Surfaces: Principles, Data, Design and ApplicationsNoch keine Bewertungen
- Lab Report On Single Phase TransformerDokument22 SeitenLab Report On Single Phase TransformerSamuel Ogeda Otieno60% (5)
- Engine Room Systems and Layout PDFDokument3 SeitenEngine Room Systems and Layout PDFRENGANATHAN P33% (3)
- Bilge Ballast and SystemsDokument72 SeitenBilge Ballast and SystemsRENGANATHAN P100% (7)
- Naval ArchitectureDokument79 SeitenNaval ArchitectureRENGANATHAN PNoch keine Bewertungen
- Full Scale Measurements - Sea TrialsDokument47 SeitenFull Scale Measurements - Sea Trialserudite_0206Noch keine Bewertungen
- Physics - I PDFDokument179 SeitenPhysics - I PDFRENGANATHAN PNoch keine Bewertungen
- Voice and Accent Training MaterialDokument30 SeitenVoice and Accent Training MaterialAnwar GaffNoch keine Bewertungen
- SD 1.1.2 Ship DimensioningDokument52 SeitenSD 1.1.2 Ship DimensioningTommyVercetti100% (1)
- Equipment Number CalculationDokument3 SeitenEquipment Number CalculationENG PTBBSNoch keine Bewertungen
- Offshore Support VesselsDokument7 SeitenOffshore Support VesselsCriss MadNoch keine Bewertungen
- Need For A Comprehensive "OSV Code": August 2011Dokument11 SeitenNeed For A Comprehensive "OSV Code": August 2011stanescu mihaiNoch keine Bewertungen
- Dimensional Constraints in Ship DesignDokument6 SeitenDimensional Constraints in Ship DesignTat-Hien LeNoch keine Bewertungen
- Hydromax ManualDokument252 SeitenHydromax Manualmanon160100% (1)
- Effect of The Moonpool On The Total Resistance of A DrillshipDokument66 SeitenEffect of The Moonpool On The Total Resistance of A DrillshipNitin ShindeNoch keine Bewertungen
- Station KeepingDokument67 SeitenStation KeepingSagar MhatreNoch keine Bewertungen
- Advanced OutfittingDokument43 SeitenAdvanced OutfittingjishnusajiNoch keine Bewertungen
- Hydodynamic Loads During The Deployment of ROVs - P.sayerDokument6 SeitenHydodynamic Loads During The Deployment of ROVs - P.sayerDavid ThomsonNoch keine Bewertungen
- Ship Dynamics PDFDokument40 SeitenShip Dynamics PDFainiNoch keine Bewertungen
- SeaBoats ID1127Dokument14 SeitenSeaBoats ID1127nipper7Noch keine Bewertungen
- The Art of Ship DesignDokument13 SeitenThe Art of Ship DesignFiras H SaqerNoch keine Bewertungen
- Structural StrengthDokument181 SeitenStructural StrengthJorge SilvaNoch keine Bewertungen
- Initial Ship DesignDokument37 SeitenInitial Ship DesignlakshmiNoch keine Bewertungen
- Dynamic Positioning & Thruster Assisted Moorings: Chris Jenman Bsc. Mrina, Fni, MrinDokument84 SeitenDynamic Positioning & Thruster Assisted Moorings: Chris Jenman Bsc. Mrina, Fni, MrinAllen WongNoch keine Bewertungen
- Anchor Chain Locker Volume CalculationDokument1 SeiteAnchor Chain Locker Volume Calculationbasant_konatNoch keine Bewertungen
- Brief Presentation of Ut-Design UT 739 L: Multifunctional, Deep Water Anchor Handling, Tug, Supply and Service VesselDokument32 SeitenBrief Presentation of Ut-Design UT 739 L: Multifunctional, Deep Water Anchor Handling, Tug, Supply and Service VesselCinthia Lidia Hidrogo PaulinoNoch keine Bewertungen
- SD-1.4.1-Container Carriers PDFDokument26 SeitenSD-1.4.1-Container Carriers PDFTommyVercetti100% (1)
- Ballast Free ShipsDokument18 SeitenBallast Free ShipsassddfNoch keine Bewertungen
- (Mooring) : 1. GeneralDokument18 Seiten(Mooring) : 1. GeneralSushanta Kumar RoyNoch keine Bewertungen
- Modern Shipbuilding: Abdullahel BariDokument6 SeitenModern Shipbuilding: Abdullahel BariSuman Kumar NathNoch keine Bewertungen
- OMAE2008-57246 - Added Resistance of Moonpools in Calm Water PDFDokument10 SeitenOMAE2008-57246 - Added Resistance of Moonpools in Calm Water PDFAnonymous JEe6LWPNoch keine Bewertungen
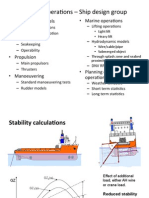
- Marine Operations Ship Design GroupDokument18 SeitenMarine Operations Ship Design GroupJorge CiprianoNoch keine Bewertungen
- 3.2 Design Development of Corrugated BulkheadsDokument17 Seiten3.2 Design Development of Corrugated BulkheadsТеодора Недялкова100% (1)
- Seaways - March 2012 PDFDokument40 SeitenSeaways - March 2012 PDFChioibasNicolae100% (1)
- HelmsmanDokument5 SeitenHelmsmanRachmat Hidayat SapwariNoch keine Bewertungen
- Model Test Towing TankDokument29 SeitenModel Test Towing Tanktvkbhanuprakash100% (1)
- 350 BERTH Technical Specifications (Wo Pipelay)Dokument55 Seiten350 BERTH Technical Specifications (Wo Pipelay)jrladduNoch keine Bewertungen
- Stability Intact & Trim Cat 17mDokument37 SeitenStability Intact & Trim Cat 17mRomie Harie100% (2)
- Assignment 1 (Ship Resistance)Dokument1 SeiteAssignment 1 (Ship Resistance)KikiNoch keine Bewertungen
- Ship Design Concept From NarcikiDokument6 SeitenShip Design Concept From NarcikiFerdy Fer DNoch keine Bewertungen
- 337TO 003 World's Largest FLNG PreludeDokument9 Seiten337TO 003 World's Largest FLNG PreludeRamNoch keine Bewertungen
- Propulsion of Offshore Support VesselsDokument8 SeitenPropulsion of Offshore Support VesselsPatrick Araujo RamalhoNoch keine Bewertungen
- ENGR 4011 Resistance & Propulsion of Ships Assignment 1: 2017Dokument1 SeiteENGR 4011 Resistance & Propulsion of Ships Assignment 1: 2017Bagas Somporn Supriadi PutraNoch keine Bewertungen
- Deep Water Mooring Systems Using Fiber RopesDokument10 SeitenDeep Water Mooring Systems Using Fiber RopesSaeed JabbariNoch keine Bewertungen
- Oil Platform TypesDokument2 SeitenOil Platform TypesandrejluigiNoch keine Bewertungen
- Basic Naval Architecture Instructors Guide and Problem Set PDFDokument415 SeitenBasic Naval Architecture Instructors Guide and Problem Set PDFnauval.arch100% (1)
- Aker Yards Offshore and Specialized VesselsDokument28 SeitenAker Yards Offshore and Specialized VesselsJames HaleyNoch keine Bewertungen
- 04-Propeller EfficiencyDokument22 Seiten04-Propeller EfficiencyAbdelrahman Atef ElbashNoch keine Bewertungen
- Towing Plan-BES PioneerDokument1 SeiteTowing Plan-BES PioneerMahesh Kumar K BNoch keine Bewertungen
- Your Propulsion Experts: Nav Schottel NavigatorDokument8 SeitenYour Propulsion Experts: Nav Schottel NavigatorMustafa TemelNoch keine Bewertungen
- On High Speed Monohulls in Shallow Water: March 2010Dokument20 SeitenOn High Speed Monohulls in Shallow Water: March 2010Stalin ZapataNoch keine Bewertungen
- Calculation For Hull Strength Construction in Offshore Structures PDFDokument10 SeitenCalculation For Hull Strength Construction in Offshore Structures PDFcxb07164Noch keine Bewertungen
- On Basis Ship DesignDokument75 SeitenOn Basis Ship DesignRENGANATHAN P100% (1)
- Design of Mooring System of Oil Storage Barges in Shallow WaterDokument10 SeitenDesign of Mooring System of Oil Storage Barges in Shallow Watermrmoh3nNoch keine Bewertungen
- Reference For MooringDokument20 SeitenReference For MooringPeyman MznNoch keine Bewertungen
- Suez Canal Transit MiniguideDokument34 SeitenSuez Canal Transit MiniguideNikhilVinayNoch keine Bewertungen
- OrcaFlex Demonstration IIT MadrasDokument11 SeitenOrcaFlex Demonstration IIT MadrasvigambetkarNoch keine Bewertungen
- RB - Aluminium A60 Hinged DoorDokument2 SeitenRB - Aluminium A60 Hinged DoorHayden Kyle KeigleyNoch keine Bewertungen
- Lazy AssignmentDokument5 SeitenLazy Assignmentthefoot39Noch keine Bewertungen
- Thesis RGdeJongDokument108 SeitenThesis RGdeJongNaval2014DNNoch keine Bewertungen
- LaunchingDokument28 SeitenLaunchingRolando ArciaNoch keine Bewertungen
- Offshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsVon EverandOffshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsNoch keine Bewertungen
- Ageing and Life Extension of Offshore Structures: The Challenge of Managing Structural IntegrityVon EverandAgeing and Life Extension of Offshore Structures: The Challenge of Managing Structural IntegrityNoch keine Bewertungen
- Sea Trials Norway NtnuDokument46 SeitenSea Trials Norway NtnuJorge Cipriano100% (1)
- 23 AuxiliaryMarineMachinery 000 PDFDokument55 Seiten23 AuxiliaryMarineMachinery 000 PDFLionel Richi100% (1)
- The Caliphate FilesDokument7 SeitenThe Caliphate FilesRENGANATHAN PNoch keine Bewertungen
- Cet June 2016 Results Ug 8jun16 PDFDokument436 SeitenCet June 2016 Results Ug 8jun16 PDFRENGANATHAN PNoch keine Bewertungen
- Marine Internal Combustion Diesel Egine I-SbrDokument232 SeitenMarine Internal Combustion Diesel Egine I-SbrRENGANATHAN P100% (1)
- Optimum Nutrition For Vigour and Vitality: Your Food Shall Be Your Medicine. - HippocratesDokument22 SeitenOptimum Nutrition For Vigour and Vitality: Your Food Shall Be Your Medicine. - HippocratesRENGANATHAN PNoch keine Bewertungen
- Draft Regulations On Tech and Prof EduDokument28 SeitenDraft Regulations On Tech and Prof EduRENGANATHAN PNoch keine Bewertungen
- Intact Stability Code msc-267-85 08Dokument94 SeitenIntact Stability Code msc-267-85 08sugram100% (1)
- Lesson 1 - Master MindDokument0 SeitenLesson 1 - Master MindRENGANATHAN P100% (1)
- Basel III For Global Banks: Third Time's The Charm?Dokument9 SeitenBasel III For Global Banks: Third Time's The Charm?RENGANATHAN PNoch keine Bewertungen
- 06 Transverse Righting MomentDokument124 Seiten06 Transverse Righting MomentRENGANATHAN PNoch keine Bewertungen
- Welding ProcessDokument6 SeitenWelding ProcessRENGANATHAN PNoch keine Bewertungen
- White Paper Shipbuilding - EnglDokument19 SeitenWhite Paper Shipbuilding - EnglRENGANATHAN PNoch keine Bewertungen
- Basel I Is The Round of Deliberations by Central Bankers From Around TheDokument2 SeitenBasel I Is The Round of Deliberations by Central Bankers From Around TheRENGANATHAN PNoch keine Bewertungen
- Sanskrit DictionaryDokument818 SeitenSanskrit DictionaryRavi Vararo100% (9)
- Actuarial SocietyDokument35 SeitenActuarial Societysachdev_researchNoch keine Bewertungen
- English SkillDokument42 SeitenEnglish SkillRENGANATHAN PNoch keine Bewertungen
- Shipbuilding Cluster in The Republic of Korea: Final ProjectDokument35 SeitenShipbuilding Cluster in The Republic of Korea: Final ProjectRENGANATHAN PNoch keine Bewertungen
- Di ElectricsDokument32 SeitenDi Electricsamaresh_rNoch keine Bewertungen
- Free Fall - Problems and SolutionsDokument7 SeitenFree Fall - Problems and SolutionsSanNoch keine Bewertungen
- Physics: Class Vii - CbseDokument140 SeitenPhysics: Class Vii - CbseCosmos WithmeNoch keine Bewertungen
- Basic Relay TestDokument2 SeitenBasic Relay TesthendrexNoch keine Bewertungen
- Well TestDokument7 SeitenWell TestJoana Rosette TordecillaNoch keine Bewertungen
- Geometric Design of Highways Part 3Dokument7 SeitenGeometric Design of Highways Part 3jun junNoch keine Bewertungen
- Study of The Characteristics of The Klystron Tube: Experiment-4Dokument8 SeitenStudy of The Characteristics of The Klystron Tube: Experiment-4Akanksha VermaNoch keine Bewertungen
- 5 - Scalar Control MethodsDokument13 Seiten5 - Scalar Control MethodsQuynh tranNoch keine Bewertungen
- Lab 2 Eng - MechanicsDokument5 SeitenLab 2 Eng - MechanicsChinna RutiranNoch keine Bewertungen
- AcousticsDokument8 SeitenAcousticsDenaiya Watton Leeh100% (2)
- Service Manual: 26SL71 29SL81Dokument60 SeitenService Manual: 26SL71 29SL81Anonymous uWAzUj42LNoch keine Bewertungen
- The Mass SpectrometerDokument7 SeitenThe Mass SpectrometerJosh, LRTNoch keine Bewertungen
- NSW Service Rules SIR Nov 2016 UnderlinedDokument162 SeitenNSW Service Rules SIR Nov 2016 Underlinedparas99Noch keine Bewertungen
- Module 4 PhysicsDokument8 SeitenModule 4 PhysicsNagi NashedNoch keine Bewertungen
- Applied Design Codes On International Long-Span Bridge Projects in AsiaDokument8 SeitenApplied Design Codes On International Long-Span Bridge Projects in Asiaafzal taiNoch keine Bewertungen
- Physics 02-04 Tension, Hookes Law, Drag, and EquilibriumDokument2 SeitenPhysics 02-04 Tension, Hookes Law, Drag, and EquilibriumAmelia RahmawatiNoch keine Bewertungen
- Ray Optics: Kristine Angela R. RevillaDokument5 SeitenRay Optics: Kristine Angela R. RevillaEzekiel BundaNoch keine Bewertungen
- CH 4 Answers PDFDokument26 SeitenCH 4 Answers PDFHind Abu GhazlehNoch keine Bewertungen
- U3 l14 String Efficiency and Methods of Increasing Strings EfficiencyDokument5 SeitenU3 l14 String Efficiency and Methods of Increasing Strings EfficiencySamia Zafar100% (1)
- University of Malta - Faculty of EngineeringDokument1 SeiteUniversity of Malta - Faculty of EngineeringStefan XerriNoch keine Bewertungen
- 32 Capacitor ExperimentDokument8 Seiten32 Capacitor ExperimentValeria MendozaNoch keine Bewertungen
- Transmission Line DesignDokument84 SeitenTransmission Line DesignCamille Licuanan NaboNoch keine Bewertungen
- Fundamentals of Grounding and Bonding: Terry KlimchakDokument50 SeitenFundamentals of Grounding and Bonding: Terry Klimchaksardarmkhan100% (1)
- MiningDokument95 SeitenMiningSuganthan MoorthyNoch keine Bewertungen
- Notes GP 1Dokument26 SeitenNotes GP 1renlie jane pedronanNoch keine Bewertungen
- AP7301-Electromagnetic Interference and Compatibility Question BankDokument10 SeitenAP7301-Electromagnetic Interference and Compatibility Question BankSujith KunjumonNoch keine Bewertungen
- The Ramp Phet LabDokument2 SeitenThe Ramp Phet LabSamuel JayNoch keine Bewertungen